

Translate this page into:
Quintic non-polynomial spline methods for third order singularly perturbed boundary value problems
⁎Corresponding author at: College of Natural Sciences, Jimma University, Jimma P.O. Box 378, Jimma, Ethiopia. gammeef@yahoo.com (Gemechis File Duressa)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
In this paper, the non-polynomial spline function is used to find the numerical solution of the third order singularly perturbed boundary value problems of the reaction–diffusion equation type. The convergence analysis is discussed and the method is shown to have fourth order convergence. To validate the applicability of the method, two model examples have been solved for different values of the perturbation parameter and mesh sizes. The numerical results have been tabulated and also presented in graphs. It can be observed from the results that the present method approximates the exact solution very well.
Keywords
Quintic spline
Non polynomial spline method
Singular perturbation

1 Introduction
Any differential equation whose solution changes rapidly in some parts of the interval or domain is known as singular perturbation problem. These problems arise very frequently in diversified fields of applied mathematics and engineering, for instance in fluid mechanics hydrodynamics, quantum mechanics, chemical-reactor theory, aerodynamics, plasma dynamics, rarefied-gas dynamics, oceanography, meteorology, modeling of semiconductor devices, diffraction theory and reaction–diffusion processes and many other allied areas. The numerical solution of perturbed differential equation of the form of self-adjoint second order two point boundary value problems has been presented using the methods such as optimal quadratic and cubic spline collocation on non-uniform partitions (Christara and Ng, 2006), a fourth order adaptive collocation approach and patching approach (Khuri and Sayfy, 2012, 2014). Parametric Quintic and non-polynomial Quintic spline solutions have been presented for third-order boundary value problems and for the system of third order boundary value problems respectively (Khan and Sultana, 2012a,b).
A singular perturbation problem is said to be reaction diffusion type problem, if the order of differential equation is reduced by two (Phaneendral et al. 2012). Basically, the problem of ineffectiveness for solving singularly perturbed problems has been associated with the perturbation parameter. Accordingly, more efficient and simpler numerical methods are required to solve singularly perturbed two-point boundary value problems. In recent years, a large number of methods have been established to provide accurate results (Temsah, 2008; Rashidinia et al., 2007; Jalilian et al., 2015; Reza and Rashidinia, 2009; Ghazala, 2012, 2015; Ghazala and Imran, 2014; Sonali and Hradyesh, 2015). Those shows that a considerable amount of work has been done for the development of numerical methods to boundary value problems using various splines, yet there is lack of accuracy and convergence because the treatment of singular perturbation problems is not trivial distribution and the solution profile depends on perturbation parameter and mesh size h, (Doolan et al., 1980). It is necessary to develop efficient and accurate numerical methods for third order singularly perturbed problems. So,the purpose of this study is to develop a new spline method for the solution of third order singularly perturbed boundary value problem which is more accurate than the existing methods. This method depends on a non-polynomial spline function which has a trigonometric part and a polynomial part.
2 Description of the method
Consider the third order self adjoint singularly perturbed boundary value problem of the form:
The spline function we propose has a form where k is the frequency of trigonometric part of the splines function which can be real or imaginary and will be used to raise the accuracy of the method.
For each segment
, the non-polynomial
has the following form:
Let
be the exact solution of Eq. (1) with boundary conditions Eq. (2) and
be an approximation to
obtained by the spline function
passing through the points
Following the technique of (Srivastava and Kumar, 2011):
The coefficients in Eq. (3) using Eq. (4) are determined as:
Applying the first and second derivative continuity at knots, that is,
, for
, the following relations are derived:
Subtracting Eq. (6) from Eq. (5), we obtain:
We define the operator
by
for any function
evaluated at the mesh points. On applying this operator for
in Eq. (8), (Kumar and Srivastava, 2009), we have:
Substituting Eq. (8) into Eq. (9), we derive the following useful relation:
Using Eqs. (9) and (10) we obtain:
Rearranging Eq. (1) and evaluating at ‘xi’ we have:
Substituting Eq. (12) into Eq. (11) and simplifying we obtain:
End conditions:
The system in Eq. (13) gives
linear algebraic equations in the
unknowns
, for
So we need two more equations, at each ends. Following the procedure given by Reza and Rashidina (2009), the required end condition can be written as:
For
. Eqs. (14) and (15) can be written as:
Expanding each terms of Eq. (16) by Taylor’s series about
. then, substituting and collecting coefficients of the same order we obtain:
Expanding Eq. (13) in Taylor’s series about
, we obtain the following local truncation error:
Similarly, we can expand each term for Eq. (17), substituting and collecting coefficients of the same order.
Using Eq. (19) and eliminating the coefficients of various powers of h for different choices of parameters and , where ,
And truncating the terms in Eq. (19) that contains and above, for arbitrary and provided that , the value of and are evaluated from:
After equating each coefficient of orders of Eq. (18) with 0 we obtain the values of parameters
In a similar manner we obtain parameters of the other end condition as:
Using Eqs. (20) and (21) in Eq. (16) and (17) respectively, with the help of Eq. (12) we obtain the two end conditions as:
Hence, Eqs. (13), (22) and (23) gives penta - diagonal system for and can easily be solved using Gauss-Elimination method.
3 Convergence analysis of the method
Consider the system of Eqs. (11), (22) and (23) in the matrix form as:
The exact solution is defined as
, Eq. (24) is written as
To determine the error bounds the row sums, of the matrix are calculated
Since , we can choose h sufficiently small so that the matrix is irreducible and monotone. Using, Ghazala (2012) and Mohanty and Jha (2005), it follows that exists and its elements are non-negative. Hence, from Eq. (27), we get
Also from the theory of matrices
Since each row of sum of matrix is and .
That is
This is written in a compact form
Defining from Eq. (29)
It follows that
From Eq. (27), the error terms can be written as
Using Eqs. (26) and (30) where is a constant and independent of h, and hence it follows that
This result can be summarized in the following theorem.
The method given by Eqs. (13), (22) and (23) for solving the boundary value problem of Eqs. (1) and (2) for sufficiently small h gives a fourth order convergent solution.
4 Numerical examples and results
To demonstrate the validity of the methods, two model singularly perturbed problems have been considered. These examples have been chosen because they have been widely discussed in the literature and their exact solutions were available for comparison.
Consider the following singularly perturbed problem.
The analytic solution is
The numerical solutions in terms of maximum absolute errors are given in Tables 1 and 3 with its graph in Figs. 1 and 2 as follows:
Consider the following singularly perturbed problem.
| N = 10 | N = 20 | N = 40 | |
|---|---|---|---|
| Our Method | |||
| 1/16 | 6.8572e−6 | 1.1698e−7 | 1.8578e−9 |
| 1/32 | 2.9156e−6 | 4.9916e−8 | 7.9252e−10 |
| 1/64 | 1.2223e−6 | 2.0005e−8 | 3.2111e−10 |
| Sonali and Hradyesh (2015) | |||
| 1/16 | 4.7e−4 | 1.1e−4 | 2.6e−5 |
| 1/32 | 1.9e−4 | 4.7e−5 | 1.2e−5 |
| 1/64 | 8.0e−5 | 1.9e−5 | 4.8e−6 |
| Ghazala (2012) | |||
| 1/16 | 2.9e−3 | 1.2e−4 | 6.4e−6 |
| 1/32 | 9.2e−4 | 3.8e−5 | 2.1e−6 |
| 1/64 | 1.4e−4 | 6.8e−6 | 4.6e−7 |
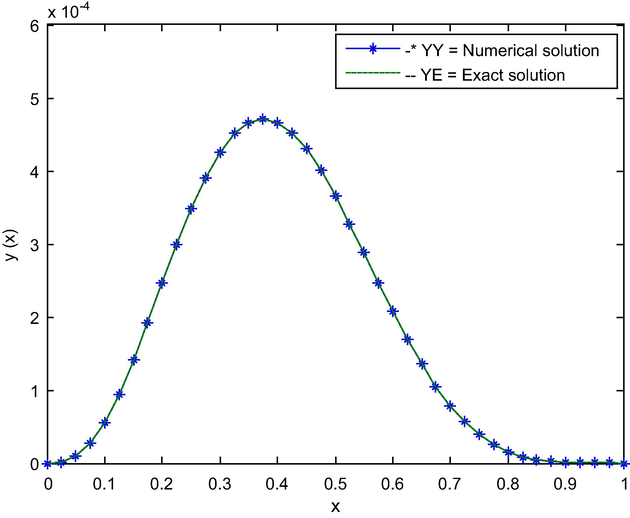
- The graph of exact and numerical solution of Example 1 for N = 40 and
.
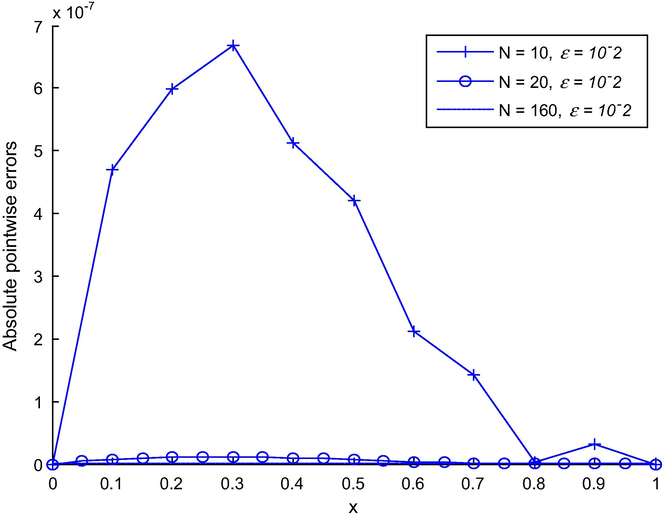
- Absolute errors decrease as the Number of mesh N increases for Example 1.
The numerical results in terms of maximum absolute errors are tabulated in Tables 2 and 3 with its graph given in Fig. 3 and 4.
N = 10
N = 20
N = 40
Our Method
1/16
3.1247e−7
4.9269e−9
7.4543e−11
1/32
1.3421e−7
2.1095e−9
3.1741e−11
1/64
5.6587e−8
8.4937e−10
1.2904e−11
Ghazala and Imran (2014)
1/16
5.70e−7
5.97e−8
4.14e−9
1/32
2.50e−7
2.52e−8
1.75e−9
1/64
1.00e−7
9.90e−9
6.8e−10
Sonali and Hradyesh (2015)
1/16
2.4e−4
6.1 × 10−5
1.5e−5
1/32
1.0e−5
2.6 × 10−5
6.4e−6
1/64
4.0e−5
1.0 × 10−6
2.5e−6
Ghazala (2012)
1/16
1.3e−2
1.1e−3
7.8e−5
1/32
3.2e−3
2.7e−4
1.8e−5
1/64
3.4e−4
2.2e−5
1.1e−6
N = 10
N = 20
N = 40
N = 80
N = 160
Example 1
1.1975e−05
2.0219e−07
3.1957e−09
4.7607e−11
5.7583e−13
6.6766e−07
1.1287e−08
1.7827e−10
2.7109e−12
3.6632e−14
3.2989e−08
5.2434e−10
8.5508e−12
1.3163e−13
1.9575e−15
1.2010e−09
2.7305e−11
3.8892e−13
6.3114e−15
9.6848e−17
1.6891e−11
8.9636e−13
2.1008e−14
2.8475e−16
4.5782e−18
1.7571e−13
1.1945e−14
6.2565e−16
1.5583e−17
2.1979e−19
1.7642e−15
1.2335e−16
7.9310e−18
4.2141e−19
1.1354e−20
Example 2
5.4458e−07
8.5081e−09
1.2746e−10
3.8280e−12
2.5562e−12
3.1090e−08
4.8206e−10
7.1755e−12
1.0009e−13
4.7587e−14
1.6607e−09
2.3244e−11
3.5263e−13
5.2109e−15
4.0246e−16
6.0523e−11
1.2982e−12
1.6745e−14
2.5603e−16
7.2777e−18
9.5650e−13
4.2374e−14
9.5845e−16
1.1907e−17
1.3447e−19
1.1282e−14
6.8915e−16
2.8422e−17
6.9320e−19
8.6027e−21
1.1478e−16
7.7799e−18
4.5896e−19
1.8729e−20
4.9879e−22
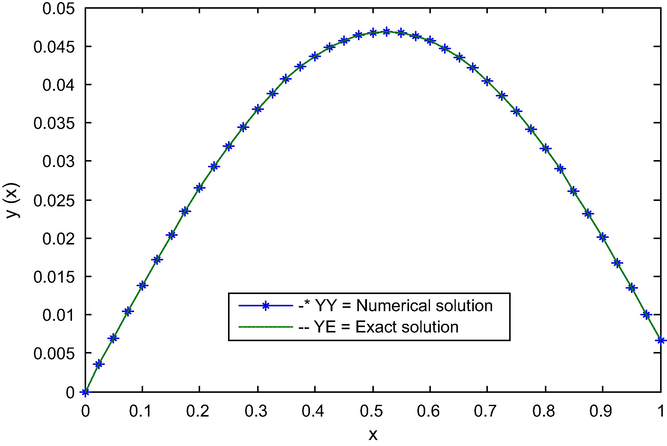
The graph of exact and numerical solution of Example 2 for N = 40 and
.
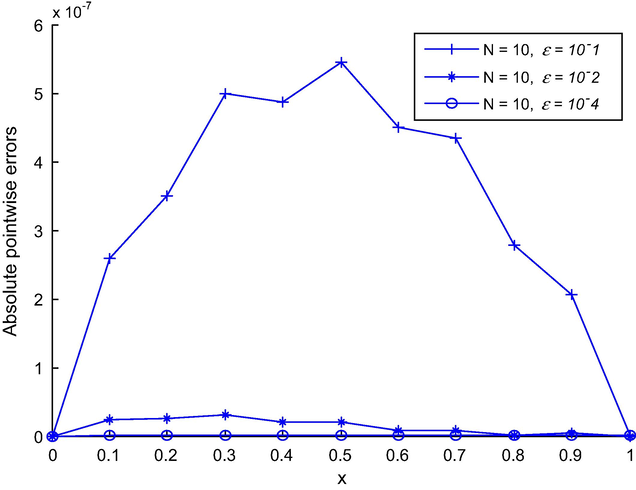
Absolute errors decrease as perturbation parameter
decreases for Example 2.
5 Discussion and conclusion
In this paper, the quintic non-polynomial spline method has been presented for solving third order singularly perturbed boundary value problems of the reaction–diffusion equation type. First, the given domain is discretized and the derivative of the given differential equation is replaced by the spline approximations. Then, the system is transformed to penta-diagonal system, which can easily be solved using any appropriate methods for solving the systems of linear equations. To validate the applicability of the proposed method, two model examples have been considered and solved for different values of perturbation parameter and different mesh sizes. The order of convergence has been established for the method and is convergent to order four. As it can be observed from the numerical results presented in Tables 1–3 and graphs (Figs 1 and 3), the present method approximates the exact solution very well. Moreover, the method has been analyzed by taking sufficiently small size of h and perturbation parameter where other existing numerical methods reported in the literature may fail.
The results obtained by the present method have been compared with the numerical results obtained by (Ghazala, 2012; Ghazala and Imran, 2014; and Sonali and Hradyesh, 2015) and is observed to be more accurate than the methods proposed by the aforementioned scholars. Furthermore, the absolute errors decrease rapidly as N increases and the perturbation parameter decreases (Figs. 2 and 4). This method can be extended to higher order Quintic non-polynomial spline methods for solving similar problems.
References
- Optimal quadratic and cubic spline collocation on nonuniform partitions. Computing. 2006;76:227-257. Digital Object Identifier (DOI)
- [CrossRef] [Google Scholar]
- Uniform Numerical Methods for Problems with Initial and Boundary Layers. Dublin: Boole Press; 1980.
- Quartic spline solution of third order singularly perturbed boundary value problem. Anzaim J.. 2012;53 No. E. pp. E44-E58
- [Google Scholar]
- Solution of the system of fifth order boundary value problem using sextic spline. J. Egypt. Math. Soc.. 2015;23(2):406-409.
- [Google Scholar]
- Quartic non-polynomial spline solution of third order singularly perturbed boundary value problem. Res. J. Appl. Sci. Eng. Technol.. 2014;7(23):4859-4863.
- [Google Scholar]
- Non-polynomial spline for the numerical solution of problems in calculus of variations. Int. J. Math. Model. Comput.. 2015;5(1):1-14.
- [Google Scholar]
- Non-polynomial quintic spline solution for the system of third order boundary-value problems. Numer. Algorithm. 2012;59:541-559.
- [CrossRef] [Google Scholar]
- Parametric quintic spline solution of third-order boundary value problems. Int. J. Comput. Math.. 2012;89(12):1663-1677.
- [Google Scholar]
- The boundary layer problem: a fourth -- order adaptive collocation approach. Comput. Math. Appl.. 2012;64(6):2089-2099.
- [Google Scholar]
- Self-adjoint singularly perturbed second order two – point boundary value peoblems: a patching approach. Appl. Math. Model.. 2014;38(11):2901-2914.
- [Google Scholar]
- Computational techniques for solving differential equations cubic, quintic and sextic spline. Comput. Methods Eng. Sci. Mech.. 2009;10(1):108-115.
- [Google Scholar]
- Class of variable mesh spline in compression methods for singularly perturbed two-point singular boundary-value problems. Appl. Math. Comput.. 2005;168(1):704-716.
- [Google Scholar]
- Asymptotic-numerical method for third-order singular perturbation problems. Int. J. Appl. Sci. Eng.. 2012;10(3):241-248.
- [Google Scholar]
- Spline approach to the solution of a singularly-perturbed boundary-value problems. Appl. Math. Comput.. 2007;189:72-78.
- [Google Scholar]
- Non-polynomial spline solution of fourth-order obstacle boundary value problems. Int. J. Math. Comput. Phys. Electr. Comput. Eng.. 2009;3(4):241-247.
- [Google Scholar]
- A new quartic B-spline method for third–order self-adjoint singularly perturbed boundary value problems. Appl. Math. Sci.. 2015;9(8):399-408.
- [Google Scholar]
- Numerical treatment of non-linear third order boundary value problem. Appl. Math.. 2011;2(8):959-964.
- [Google Scholar]
- Spectral methods for some singularly perturbed third order ordinary differential equations. Numer. Algorithm. 2008;47:63-80.
- [Google Scholar]




