

Translate this page into:
Force analysis of unstable section of electrostatic spinning charged jet
⁎Corresponding author. zhyliang@dhu.edu.cn (Liang Zhiyong)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
The basic mechanism of electrostatic spinning is rapid whipping of charged jet. An ideal model was established for the key part of electrostatic spinning mathematical model, which is visco-elastic behavior model of the unstable section of charged jet. Through mechanical analysis of the viscoelastic behavior model and calculation of its governing equations, the physical and dynamic properties of the unstable section of the charged jet in the three-dimension Cartesian coordinate system were obtained. It will have a theoretical effect on the development of electrostatic spinning technology.
Keywords
Electrostatic spinning
Charged jet
Rapid whipping
Viscoelastic behavior model
Mechanical analysis

1 Introduction
The electro-spinning method is a new spinning method for preparing polymer nanofibers by using electrostatic field force (Jianzong, 2012), which is of great significance for mathematical modeling. In the known literature, the mathematical model of electro-spinning can be divided into two types: the first type of model uses the equation of continuum mechanics to describe the charged jet, which focuses on the microscopic mechanical properties of the charged jet, i.e. hydrodynamics, Based on computational fluid dynamics and visco-elastic mechanics, the motion law of charged jet under external action is studied from a unified point of view. For example, Shin et al. (2001) proposed the electro-hydrodynamic model of Newtonian liquid jet; the second model uses Newtonian mechanics. The equation describes the charged jet, which focuses on the macroscopic mechanical properties of the charged jet, that is, based on Newton's law of motion, the motion law of the charged jet is studied. For example, Yarin and Zussman (2004) proposed a dimensionless bead connected by a damper and a spring model. Therefore based on the different characteristics and the relationship between the two types of mechanical models, a new mechanical model of the unstable segment of the charged jet, the visco-elastic behavior model, can be established.
Considering the macroscopic and microscopic mechanical properties of the charged jet, this paper firstly establishes a new mechanical model of the charged jet unstable section, and analyzes the force, and then establishes the ideal behavior of the charged jet under the three-dimension Cartesian coordinate system, Coupled control equations.
Considering the ideal motion of the unstable segment of the charged jet and the parameter calculation of the mechanical model, the mechanical model of the unstable segment of the charged jet proposed in this paper is based on the following assumptions, see Fig. 1.
Continuous charged jet trajectories and ideal micro element jet models.
1.1 Hypothesis and establishment of a mechanical model for unstable segments with charged jets
-
(1)
The electrospinning process starts from the needle (Theron et al., 2005).
-
(2)
The charged jet process does not consider the case where the main jet splits into a secondary jet (Yarin and Zussman, 2004).
-
(3)
The fluid unit of the jet is made up of a model of an elongated segment cylinder, which is only subjected to axial forces.
-
(4)
The polymer solution contains only the embedded charge, and its transport is only carried out by the movement of the fluid unit of the jet (Yarin and Zussman, 2004).
-
(5)
The viscoelastic behavior of the polymer solution can be described by a nonlinear Maxwell flow model (Yarin and Zussman, 2004).
-
(6)
The mass transport of the solvent between the charged jet and the surrounding gaseous medium is described by Fick's first law (Theron et al., 2005).
-
(7)
The external electrostatic field is calculated by vector superposition by the electric field excited by the charge carried by the charged jet (Shin et al., 2001).
1.2 Mass transport equation of solvent between charged jet and surrounding gaseous medium
The solvent will volatilize during the movement of the charged jet. In order to facilitate the calculation of the governing equation, it is necessary to consider the mass exchange between the charged jet and the surrounding gaseous medium (air).
Fick's first law describes the large amount of solvent transport between the jet in the rotating space and the surrounding medium (Yarin and Zussman, 2004; Theron et al., 2005; Weiya et al., 2014), as shown in Eq. (1).
In order to facilitate the next calculation, we define
as the ratio of the instantaneous volume
of the straight segment of the jet stream of the i-th segment to the instantaneous volume
of the straight segment of the initial jet (i.e. the volume scale factor), which is calculated as shown in Eq. (3)
1.3 Visco-elastic behavior model and constitutive equation of charged jet
In order to correctly describe the visco-elastic behavior of the charged jets in unstable sections, we use two different nonlinear rheological models to represent the different stages of jet motion. In the initial stage of the jet motion, because of the high content of solvent in the jet, a new model of the solution in which the solute and the solvent model are connected in parallel is used. The solute model is represented by a series of linear springs and viscous dampers, and the solvent model is represented by another viscous damper. In the final stage of the jet motion, the solvent volatizes with the movement of the jet and the content is less and less, and finally only the solute remains. Therefore, this stage can be used in the nonlinear Maxwell flow model, which can only describe the stress relaxation process of viscoelastic fluids.
1.2.1 When the solvent content in the unstable section jet is high, that is, in the initial stage, the constitutive equation of the described model is as shown in Eqs. (4)–(6). Wherein: formula (4) is a solute model; formula (5) is a solvent model; and formula (6) is a solution model.
For the creep process of a viscoelastic fluid the stress remains constant
. Both sides of Eq. (6) simultaneously derive the time t, and the following Eqs. (7) and (8) can be obtained by calculation.
In summary, for the straight section of the first-stage jet micro-element, when the solvent content is high, the viscoelastic behavior model is shown in Eq. (10).
1.2.2 When the content of solvent in the unstable section jet is low, that is, in the final stage, the constitutive equation of the described Maxwell flow model of viscoelastic fluid is shown in Eq. (11).
1.4 Calculation of applied electric field strength
The applied electric field is separated from the needle by a certain distance, which not only can stabilize the jet of the straight line segment, but more importantly, it stretches and accelerates the movement of the unstable section of the charged jet, thereby making the electro spun fiber finer.
In this paper, the grounded disc type current collector is used. The electric field between the needle and the grounded disc collector can be considered as a system composed of a charged jet and a current collector composed of infinitesimal cylindrical jet micro-elements (Shin et al., 2001). Assuming that the point where the needle hole is located is the Cartesian coordinate system origin O(x, y, z), see Fig. 2. Each segment of the cylindrical segment of the jet micro-element is uniformly charged, and the grounded disk-type current collector is regarded as an infinite conductive plane. Then the electric field distribution calculation can adopt the “mirror method” model, that is, construct a virtual point charge (mirror charge Q), and the charged symbol of the charge is completely opposite to the jet charge charged symbol. The charge is placed symmetrically on the upper side of the grounded disc-type current collector, the distance from which to the current collector is equal to the distance from the needle to the current collector (Yarin and Zussman, 2004). This method can satisfy the boundary condition of a constant electrostatic potential, so that a point on the surface satisfies the boundary condition. In this mathematical model it is assumed that the charged jet is ejected from point O and is selected as the top end of the straight section of the initial jet micro-element. The calculation of the electrostatic potential at the jet microelement of the i-th segment is as shown in Eq. (13).

A mathematical and physical model for calculating the distribution of external electric field.
From the formula (14), the following formulas (15) and (16) can be calculated.
By calculating the above parameters, substituting (13) can verify that the electrostatic potential on the plane of the grounded disk collector is zero (because of grounding). According to the above derivation, the electric field strength between the needle and the grounded disk current collector can also be calculated.
Assuming that the electric field intensity generated by the image charge Q at r_i = (x_i, y_i, z_i) is
, the electric field intensity generated by the stable distributed jet charge at the needle at
is
, then the total field Strong is
. The calculation formula of the electric field strength of the point charge is as shown in Eqs. (17) and (18).
Applying a high voltage between the needle and the grounded disk collector creates a strong electrostatic field. Since the distance between the needle and the grounded disk current collector is small, the electric field intensity distribution is relatively uniform, and the direction of the electric field strength can be considered to be approximately vertical to the ground plate. Therefore, the calculation of the electric field strength can adopt the vector superposition rule as shown in the Eq. (20).
2 Mechanical analysis of the micro-element of unstable jet volume
After establishing the mechanical model of the unstable section of the charged jet, considering the mass exchange between the charged jet and the external gaseous medium, the behavior of the viscoelastic fluid and the influence of the applied electric field, on this basis, its gravity, applied electric field force, Coulomb force, and viscosity Specific force analysis is performed on elastic force, surface tension and air resistance. Among them, the applied electric field force, Coulomb force, viscoelastic force and surface tension have a crucial influence on the motion of the unstable segment of the charged jet.
2.1 Gravity
Charged jets are subject to their own weight. Therefore, the gravity of the straight segment of the i-th segment jet micro-element is as shown in Eq. (21).
2.2 Applied electric field force
The charged jet is affected by the applied electric field. Since the direction of the electric field strength
is vertically upward, the direction of the electric field force
received by the jet micro-element is also vertically upward. Therefore, the electric field force
of the straight segment of the i-th segment jet micro-element is as shown in Eq. (22).
2.3 Coulomb force
Since the charged charge properties in the charged jet are the same, for each segment of the jet micro-element, the Coulomb repulsion of the other jet micro-element segments is affected, thereby changing the motion trajectory of the jet. Therefore, the influence of Coulomb force cannot be ignored in the jet process. Therefore, the Coulomb force
of the jet section of the i-th segment is as shown in Eq. (23).
2.4 Viscoelastic force
The viscoelastic force of the charged jet micro-element should be equal to the product of the instantaneous cross-sectional area of the jet micro-element and the instantaneous normal stress. The calculation of the instantaneous normal stress is performed on the basis of the nonlinear rheological model, that is, the differential equation described by Eqs. (10) or (12).
For the i-th segment jet micro-element straight line segment, At the same time, it will be affected by the viscoelastic force
of the (i-1)-stage jet micro-element and its viscoelastic force
of the (i + 1)-stage jet micro-element. Therefore, the viscoelastic force
of the straight section of the i-th jet micro-element is as shown in the formula (24).
2.5 Surface tension
The surface of the liquid has a tendency to shrink to maintain a minimum surface area. During the movement of the charged jet, the surface area of the jet increases due to the stretching, and the surface energy increases (Shin et al., 2001).
For the i-th segment jet micro-element straight line segment, it will also be affected by the surface tensions
and
of the (i-1)th and (i + 1)th segment of the jet micro-element, and the action line and its corresponding jet respectively The axis direction of the micro-element is related (Yarin and Zussman, 2004). The magnitude of the surface tension of the jet micro-element is equal to the first-order derivative of the instantaneous surface energy versus the instantaneous length. Therefore, the surface energies
and
of the jet stream element segments of the (i-1)th and (i + 1)th segments are as shown in the Eqs. (25) and (26).
In addition to the surface tension parallel to the interface and perpendicular to the contour, due to the bending of the charged jet micro-element, an additional surface tension
is produced, and its line of action follows the radial direction of the corresponding curvature circle of the jet micro-element and points Center (Yarin and Zussman, 2004). At the same time, since the length of each segment of the jet micro-element is extremely small, the curvature radius of the curvature circle corresponding to the jet stream element segments of the (i-1)th, i-th, and (i + 1)-th segments is approximately equal. Therefore, the additional surface tension
is as shown in the formula (28).
2.6 Air resistance
The charged jet will be subjected to the resistance of the air during the movement, and the resistance caused by the friction between the jet and the gas is equal to the sum of the frictional resistance and the differential pressure resistance (Yarin and Zussman, 2004). The frictional resistance is related to the shear stress in the boundary layer. The differential pressure resistance is related to the wake separated from the fluid surface by the flow line. The interference effect of the flow line depends on the shape of the fluid and the Reynolds number. The influence of the surface roughness is not considered in the model.
For the i-th segment jet micro-element straight line segment, see Fig. 3. it is also affected by the resistance
of the (i-1)-th segment jet micro-element segment and its resistance
of the (i + 1)-th segment jet micro-element segment. Therefore the air resistance
of the straight section of the i-th jet micro-element is as shown in Eq. (30).
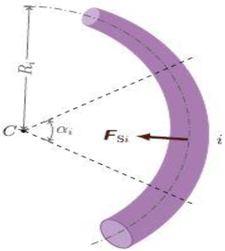
Section i, the effect of surface tension on the microelement section of a jet.
3 Calculation of governing equations
Through the force analysis described above, it is known that the straight segment of the i-th jet micro-element is affected by the electric field force
, the Coulomb force
, the viscoelastic force
, the surface tension
, the air resistance
, and the gravity
. Therefore, the resultant force
of the i-th segment jet micro-line segment is as shown in Eq. (31).
According to Newton's second law, the resultant force of the straight segment of the i-th segment jet micro-element is equal to the first derivative of its momentum versus time, then Eq. (32) is obtained.
The conservation of charge during the movement of a charged jet (Yarin and Zussman, 2004, (Yong et al., xxxx)gives the Eq. (33).
4 Numerical simulations
The results of numerical simulation of the jet by FLUENT software show that the motion state and trajectory of the jet can be observed obviously. From the simulation diagram of the jet trajectory, it can be found that the jet is mainly divided into stable section and unstable section. When the jet just left the needle, the electric field force on the jet was larger because of the strong electric field intensity at the needle and the uniform and stable distribution of the electric field. This will cause the jet to speed up continuously, and the trajectory of the jet is basically in a straight line. When the jet moves to a certain distance from the needle, the electric field intensity becomes weaker and the electric field force on the jet becomes smaller. Because of the interaction between jet charges, the jet will also be affected by the Kulun force. In addition, the jet is also affected by viscoelastic force, surface tension, air resistance and its own gravity. Therefore, these forces, together with the influence of external instability, will change the motion state of the jet immediately. Once the jet enters the unstable state, its motion will become more complicated, which will lead to the irregular curvilinear motion of the jet. In the process of jet movement in unstable section, because of the long track of jet motion and the constant volatilization of solvent, the diameter of jet is refined sufficiently, and finally the dry nanofibers are formed on the receiving device.
We might as well set the inlet velocity of the jet at the inlet boundary of the velocity to 30.0 m/s; Then five groups of data of rotation velocity of different air flow field were set up. The three groups of different rotation velocities were 60 rad/s, 120 rad/s, and 300 rad/s respectively. Therefore according to different parameter conditions, the corresponding trajectory simulation diagram of unstable jet can be obtained, as shown in Fig. 4.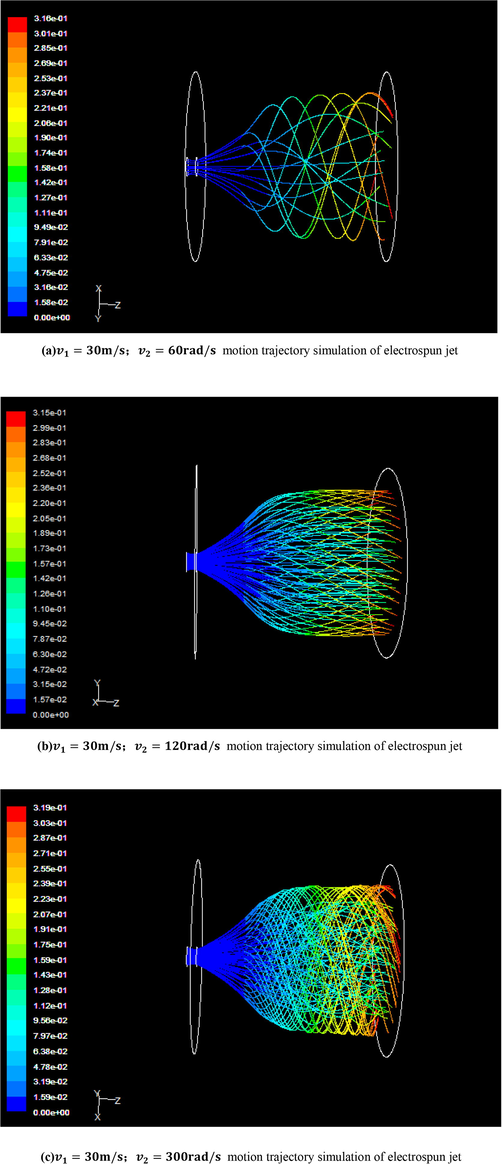
The simulation diagram of the jet trajectory.
From Fig. 4 it can be found that the jet is mainly divided into stable section and unstable section. When the jet just left the needle, the electric field force on the jet was larger because of the strong electric field intensity at the needle and the uniform and stable distribution of the electric field. This will cause the jet to speed up continuously, and the trajectory of the jet is basically in a straight line. When the jet moves to a certain distance from the needle, the electric field intensity becomes weaker and the electric field force on the jet becomes smaller. Because of the interaction between jet charges, the jet will also be affected by the Kulun force. In addition, the jet is also affected by viscoelastic force, surface tension, air resistance and its own gravity. Therefore, these forces, together with the influence of external instability, will change the motion state of the jet immediately. Once the jet enters the unstable state, its motion will become more complicated, which will lead to the irregular curvilinear motion of the jet. In the process of jet movement in unstable section, because of the long track of jet motion and the constant volatilization of solvent, the diameter of jet is refined sufficiently, and finally the dry nanofibers are formed on the receiving device.
5 Conclusion
-
(1)
Using Fink's first law, the mass transport equation of the solvent between the charged liquid jet and the surrounding gas medium is established. The behavioral model of viscoelastic fluid under different conditions is established, and the corresponding constitutive of viscoelastic fluid is obtained. Equation; using the principle of “mirror method”, the physical model of the applied electric field is established, and the electric field strength is qualitatively analyzed and quantitatively calculated.
-
(2)
Mechanical analysis of unstable segments of charged jets, including analysis and calculation of electric field force, Coulomb force, viscoelastic force, surface tension, air resistance and gravity.
-
(3)
Based on the force analysis, the coupled governing equations of the ideal behavior of charged jets in a three-dimensional Cartesian coordinate system are established.
-
(4)
From the simulation diagram of the jet trajectory, it can be found that the jet is mainly divided into stable section and unstable section, which is valid for the theory.
Acknowledgements
This work was partly supported by the Chang Jiang Youth Scholars Program of China and grants (51373033 and 11172064) from the National Science Foundation of China to Prof. Xiaohong Qin, As well as “The Fundamental Research Funds for the Central Universities” and “DHU Distinguished Young Professor Program” to her. It also has the support of the Key grant Project of Chinese Ministry of Education (No 113027A). This work has also been supported by “Sailing Project” from Science and Technology Commission of Shanghai Municipality (14YF1405100) to Dr. Hongnan Zhang.
References
- Numerical Simulation and Experimental Fitting of Electrospinning Jet Spinning Form. Shanghai: School of Science, Donghua University; 2012. p. :1-8.
- Experimental characterization of electrospinning: the electrically forced jet and instabilities. Polymer. 2001;42(25):9955-9967.
- [Google Scholar]
- Multiple jets in electrospinning: experiment and modeling. Polymer. 2005;46(9):2889-2899.
- [Google Scholar]
- Finite element analysis of electric field strength and distribution during multi-needle electrospinning. J. Textile Res.. 2014;7(06):1-6.
- [Google Scholar]
- Upward needleless electrospinning of multiple nanofibers. Polymer. 2004;45(9):2977-2980.
- [Google Scholar]
- Theoretical analysis and of three dimensional free surface of electrospinning. J. King Saud Univ. 2017
- [Google Scholar]




