

Translate this page into:
Control and monitoring systems used in variable rate application of solid fertilizers: A review
⁎Corresponding author. ahmedalameen088@gmail.com (Ahmed A. Alameen) aalameen@ksu.edu.sa (Ahmed A. Alameen)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
Practicing variable rate application (VRA) technology depends mainly on using advanced methods (sensors or prescription maps) and complex control system modules. Although VRA is steadily spreading and offering significant benefits in the management of agricultural inputs, there are still some technical limitations that need to be addressed and improved by researchers and companies. Fertilization is an important component of agricultural production worldwide, solid and liquid are the two main forms of fertilizers used in agriculture; whereas solid fertilizers are widely used in agriculture because they are affordable and easy to store and use. Therefore, the main objective of this study was to review the performance of the existing control and monitoring systems used in the map and sensor based VRA of solid fertilizers and to highlight their inadequacies. The current study demonstrated that map based VRA system is characterized by high accuracy resulting from its ability to use multiple sources of information to prepare accurate prescription maps. However, previous research has shown that, depending on the actuation method employed, the map-based systems utilized for VRA of solid fertilizers operate with an overall accuracy ranging between 94% and 98%. The study also demonstrated that the capacity to achieve on the go VRA of agricultural inputs, with an overall accuracy of roughly 96% and without any time lag between measurements and application, has recorded the most significant benefits for sensor-based systems. While, the limitations in easy access, simple and accurate sensors; as well as the demand for more potent data analysis and real-time decision-making software’s, are among the drawbacks of these systems. Overall, there is still an urgent need for more research to come up with practical solutions for accurate and effective feedback systems to optimize the VRA systems, especially for solid fertilizers applications.
Keywords
Precision agriculture
Variable rate application
Map-based variable rate application
Sensor-based variable rate application
Solid fertilizer
Control system

1 Introduction
Fertilization is an effective measure to enhance soil properties and increase production by providing the plants with the required nutrients. Fertilizers can be applied to agricultural fields by three different application methods, either manually, or using agricultural machines or through the irrigation systems (fertigation). However, fertilizers can be applied to the entire field or just on a specific part within the field (Mueller et al., 2012; Wang et al., 2012). Adding fertilizers to agricultural fields using modern methods can have many benefits such as improving the soil characteristics and plant growth habits, reducing production costs, and increasing productivity (Villalobos et al., 2016). When fertilizers are applied uniformly, some parts of a field may be under-fertilized while other parts may be over-fertilized (Khosla and Alley, 1999). In general, under-fertilization can result in yield and quality reduction; while over-fertilization can impose a danger to the environment i.e., deteriorate water quality, promote weed growth, may results in higher expense and lower profit (Cambouris et al., 1999; Hammond, 1993; Chattha et al., 2014). With the development of variable rate application (VRA) technology, specific fertilizer application techniques may now be used to manage variations in agricultural fields (Al-Gaadi et al., 2015).
Variable rate application (VRA) is defined as a technique used for different agricultural inputs such as seeds, fertilizers, irrigation water and tillage based on required needs of different management zones in the agricultural fields. A management zone (MZ), however, describes a part of an agricultural field characterized by homogenous factors and indicators. As a result, the foundation of the deployment of precision agriculture (PA) techniques is the segmentation of agricultural areas into several MZs based on soil mapping, crop growth and yield (Peterson and Wallenhaupt, 1996; Lan et al., 2008; El Nahry et al., 2011). Furthermore, VRA systems have the advantages to enhance the efficiency of the agricultural inputs by reducing the cost as well as limiting the environmental pollution (Iida et al., 2001; Grisso et al., 2005; Ahmad and Mahdi, 2018; Sui, 2019). Map-based and sensor-based systems are the VRA systems currently available in the market for agriculture input applications. The map based VRA systems adjust the application rate based on a GPS receiver and a prescription map (site-specific application map) of the desired rate in the field. In these systems, soil and/or crop information is used to prepare a prescription map, which is in turn used in conjunction with a GPS receiver to control the application rate as the applicator moves across the field. The processes required in the map based VRA systems are illustrated in Fig. 1 (Ess et al., 2001). However, sensor-based systems require neither a GPS receiver nor a prescription map; But mostly depend on the real-time field data from soil/crop using sensors (Fig. 2).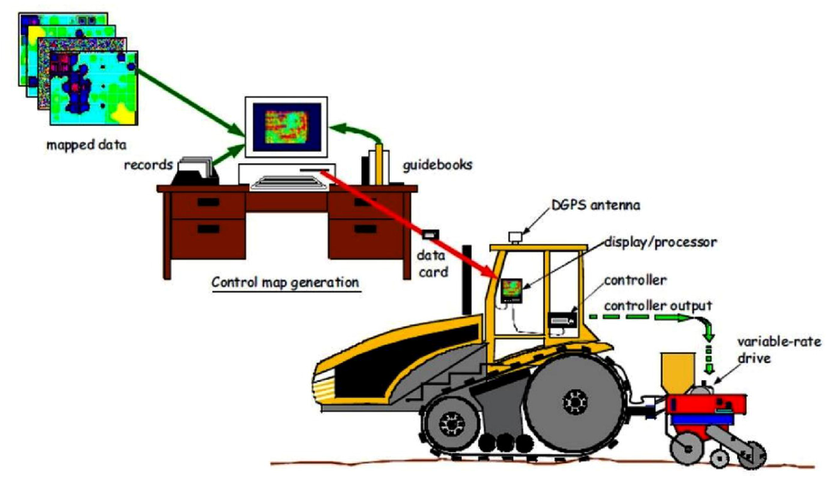
Map-based VRA system (Ess et al., 2001).
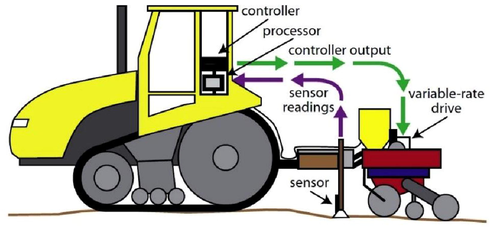
Sensor-based VRA system (Grisso et al., 2005).
The capacity to employ numerous sources of information, the availability of application systems for most agricultural inputs, and the sufficient interval between input sampling and application that helps improve system accuracy are the main benefits of the map-based system. However, the arduous work and high expense of soil and plant analysis, the temporal unpredictability of soil and crop parameters between sample and application, and the requirement for specialized software tools to generate the appropriate prescription maps are some drawbacks of the system (Morgan and Ess, 1997; Sudduth, 1999). Contrarily, the most significant benefits of sensor-based systems include the ability to alter the rate at which agricultural inputs are applied without first mapping the area or gathering field data, the ability to monitor crop and soil conditions in real-time, and the ability to apply agricultural inputs immediately after measurement without any delay. While, the most common disadvantages of the sensor-based systems include the high initial cost and the lack of precise sensors, as well as the need for real-time data analysis and decisions (Guan et al., 2019). The choice between a map-based or sensor-based VRA systems, however, primarily depends on the investment capacity, the level of technical knowledge, and the type of application required.
Based on the aforementioned techniques (sensor-based or map-based), numerous types of control systems for VRA of granular fertilizers have been created and put into practice. Numerous researchers have created, tested, and assessed sensor-based systems for VRA for granular fertilizers (Mouazen et al., 2007; Maleki et al., 2008; Heiβ et al, 2021; Mirzakhaninafchi et al., 2021), While researches were also done map-based methods to develop a precise and efficient way for applying the VRA of granular fertilizers (Yu et al., 2006; Tola et al., 2008; Jafari et al., 2010; Chunying and Xi, 2010; Talha et al., 2011; Forouzanmehr and Loghavi, 2010; Reyes et al., 2015; Alameen et al., 2019). However, the output measuring sensors are considered as the most significant components of VRA system for granular fertilizers that still requires more research work to improve their efficiency. This is because of the data gained from the output measurement sensor is critical toward creating the application maps and serving as feedback for the control system to change the application rates if they deviate from the required rates. In addition, the output data are used by the operator to monitor the output application rates on-the-go while working.
As a result, the primary goals of the current study is to examine the recent development in VRA methodologies used for solid fertilizers and to provide an overview of the significant findings from previous studies that might be applied in future directions. However, the specific objectives include the following:
-
To review the performance of different systems used for VRA of solid fertilizers.
-
In order to improve future researches, we included the flaws that have not been addressed by earlier studies as well as those still require further improvements.
2 Materials and methods
2.1 Sensor-based VRA systems
As key components of sensor based VRA of solid fertilizers, the significance of sensor-based systems lies on their ability to estimate plant nutrient concentrations regularly (Mulla, 2013; Paraforos et al., 2019). Sensor-based VRA systems for solid fertilizers were designed and tested by many researchers to assess their efficiency and the accuracy at different working conditions. As an example, Maleki et al., (2008) designed and implemented a sensor-based VRA system for on-the-go application of phosphate (P2O5) fertilizer for maize crops regularly. This system consisted of three main components: (i) a portable VIS–NIR spectrophotometer sensor with a measuring range of 305–1711 nm, installed in front of a pneumatic planter, to measure phosphorous (P) concentrations in the soil, (ii) a VIS–NIR model to predict the extractable phosphorous, and (iii) a control system equipped with an electric actuator to adjust the fertilizer application rate.
Another example of sensor-based VRA system used for granular nitrogen (N) fertilizer was accomplished successfully by Heiβ et al., (2021) using two N-sensors mounted on the tractor roof, to measure the amount of N by utilizing the crop reflectance at specific wavelengths (670, 730, 740 and 770 nm) (Fig. 3). The control unit of this system, equipped with an electric actuator (electric motor), used the pre-determined fertilizer rate to adjust the amount of N fertilizer during the application process. Mirzakhaninafchi et al. (2021) designed and developed a hydraulic-based VRA system capable of detecting N deficiency within the field in real time and adding urea fertilizer according to the crop requirement. In this system, the microcontroller was set to receive a signal from the Green Seeker N-sensor and sends a signal to the pulse-width-modulation (PWM) valve to change the rotational speed of the hydraulic motor causing a change in the shaft rotation of the metering mechanism drive shaft based on the amount of fertilizer required.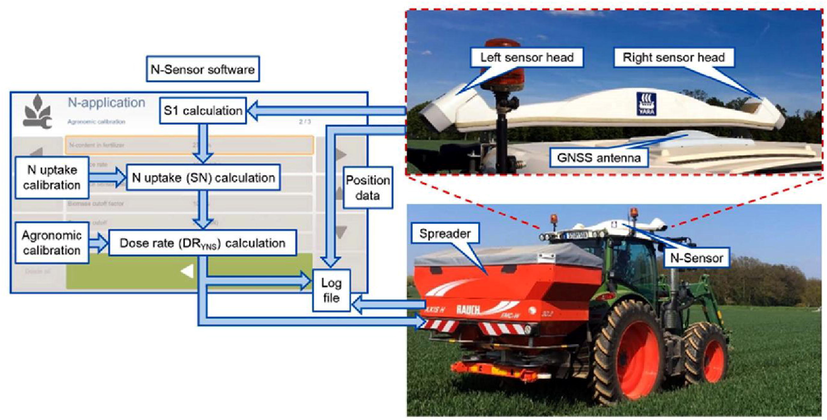
A sensor-based system for VRA of nitrogen fertilizer (Heiβ et al., 2021).
2.2 Map-based VRA systems
Map-based VRA systems have been widely used for solid fertilizers, where different actuation systems (electric, pneumatic, and hydraulic) were used as control drives. Similarly, Tola et al., (2008) developed a map-based VRA system for a pneumatic seeder to accurately monitor and change the application rate of granular fertilizers in real-time using an electric actuator. The most important component in this system was the developed sensor for monitoring the output fertilizer rate through an incremental encoder and a steel plate (Fig. 4).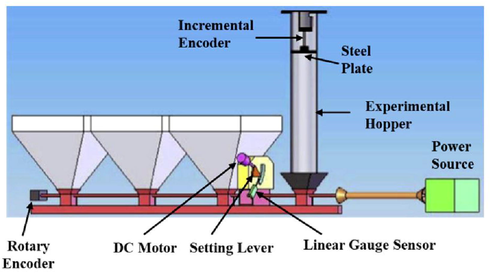
Schematic diagram of the VRA system developed by (Tola et al., 2008).
In another example, a conventional drill was modified by Jafari et al., (2010) into a variable rate applicator with a drill metering shaft driven by a DC electric motor. The controller in this system determines the drill position using a GPS receiver and the drill wheel speed using a rotary encoder. The control system retrieves the desired application rate from the reference data and sends a signal to the electric drive to apply the required application rate at the specified location of the field. Also, Forouzanmehr and Loghavi (2010) developed and evaluated the performance of a map-based variable rate crop granular fertilizer application system. This applicator consisted of a ground-driven wheel with a rotary encoder to measure the applicator displacement and forward speed and a microprocessor to modify the step motor driving the fertilizer metering system. A variable-rate Pulse Width Modulation (PWM) control system was developed by Chen et al., (2018) on a granular fertilizer applicator, the developed control system comprised a microcontroller unit (MCU), voltage detection unit, speed measuring unit, and a positive voltage regulator. The control system sends a signal to an electric drive to change the fertilizer application rate based on the PWM method. A recent example based on using drones for VRA of fertilizers based on prescription maps was developed by Song et al., (2021) (Fig. 5). The developed system mainly consisted of an electric step motor, flight controller and spreading controller. Talha et al. (2011) developed a mechanical planter control system using a linear pneumatic cylinder attached to the planter to adjust the position of the fertilizer flow adjusting lever for precise application of fertilizer (Fig. 6).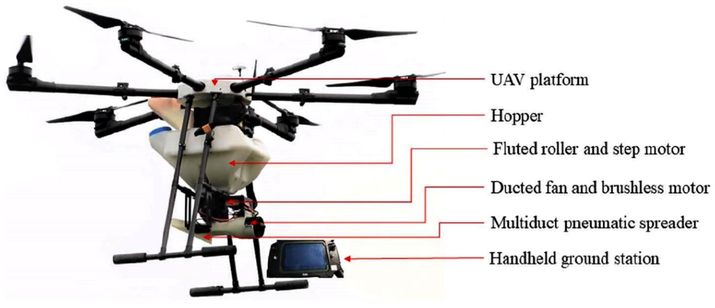
Components of the drone-type granular fertilizer spreader (Song et al., 2021).
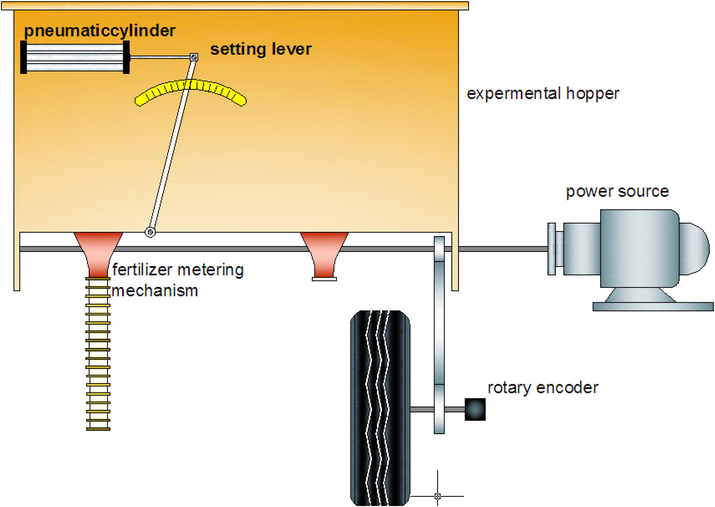
Schematic diagram of the developed control system (Talha et al., 2011).
Another pneumatic control actuator was developed by Alameen et al., (2019) to adjust the fertilizer application rate in a seed drill based on a prescription map, and through utilizing specific schematic diagram. An automatic map-based system for VRA of granular fertilizers using hydraulic technology was developed and tested by Reyes et al., (2015) (Fig. 7). The major components of this system included a GPS, a micro-controller with LCD display, a proportional flow control electric valve, a rotational speed sensor and a hydraulic motor mounted on the fertilizer applicator shaft. The control unit of this system was fed with a digital prescription map of the desired application rates, and the bypass valve arranged the fertilizer flow to the hydraulic motor to adjust the fertilizer rate to the desired amount.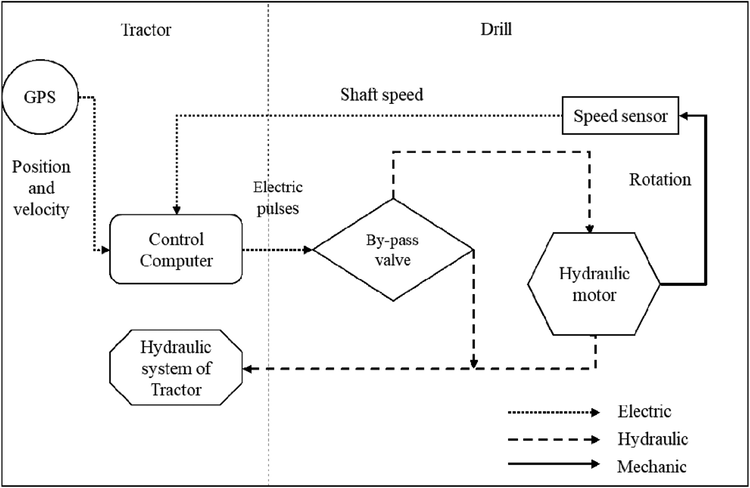
Flow diagram of the VRA system developed by Reyes et al., (2015).
3 Results and discussions
According to the above mentioned VRA systems for solid fertilizers, it is still requiring detailed insights to enhance the working efficiency of these systems. Therefore, the performance and limitations of the major components of the existing VRA systems will be discussed in this section.
3.1 Real-time sensors used in sensor-based VRA systems
Many researchers' studies have shown that the majority of current VRA technologies and applications for agricultural inputs use the map-based approach, because there aren't enough affordable, simple, and accurate sensors for rapid measurements of soil and crop parameters (Ess et al., 2001). Similar results were reported by Paraforos et al., (2019), suggested that there are significant variations in the performance of sensors used for estimating soil and plant characteristics in terms of their types, design, and working methodology. In this regard, researchers and specialized companies are working hard to develop additional sensors for rapid and accurate measurements of soil and plant properties in agricultural fields. An example of such sensor system is the VIS-NIR spectrophotometer used by Mouazen et al., (2007), to develop a sensing system for real-time estimation of soil properties by connecting an optical probe with a sub-soiler chisel plow to obtain soil spectra used to predict some soil properties such as carbon (C), moisture content (MC), pH and phosphorous (P). This model demonstrated the ability and accuracy in real-time measurement of soil properties, with an average error values of 5.97, 0.37, 27.48 and 5.10 % compared to the reference measurements of total C, MC, pH, and P, respectively. This system has also been used by Maleki et al., (2008), to predict the extractable phosphorous in the soil and provide a signal to the fertilizer applicator for on-the-go phosphate application during maize planting, with an overall accuracy of 95.83 %. Similar results were reported by Heiβ et al., (2021) indicating N-Sensor algorithms (Fig. 3) for different calibration with Pearson correlation coefficient (r) value of 0.99 and a maximum root mean square error (RMSE) of (0.14 %).
3.2 Control drives
-
Electric actuation systems
Electric actuators have been successfully used with VRA control systems for solid fertilizers, because of their great accuracy, simplicity of networking, and programing, and grown to be a favorite of many researchers. Based on that, the electric drive used with the fertilizer rate control unit developed by Tola et al., (2008) recorded high accuracy in VRA performance of granular fertilizer with overall system errors (±5%), the response time recorded was 0.95–1.90 s of the control system to change from one fertilizer's application rate to another. Furthermore, it was also recorded that the response time of a variable rate electrical controller of a seed drill was (7.4 and 5.2) seconds, when changed from low to high rate and from high to low rate respectively (Jafari et al., 2010). Another electric drive system, developed by Forouzanmehr and Loghavi (2010) was used in a fertilizer spreader and showed successful response to the target discharge rates with an overall mean error of 5.4 %, where the application rate error was estimated at 9 % in the most extreme cases (high discharge rate and high travel speed). In a recent published work, Song et al., (2021) used a DC stepper motor to develop a map-based variable rate control system for unmanned aerial vehicle (UAV) based granular fertilizer spreader. This system demonstrated a high response to effectively control the fertilizer application rate, with an average discharge rate error of 6.05 % and a response time of 0.1 s to switch between the target fertilizer rates.
-
Pneumatic actuation systems
Several attempts have also been made to use pneumatic linear actuators with VRA systems for solid fertilizers, because they are light in weight, easy to operate and cost effective. Talha et al. (2011) developed a pneumatic actuator control system for VRA for granular fertilizers using a seed drill. This system demonstrated the ability to precisely control the flow rate produced by granular manure, with an overall error in the range of ± 6 %. Another attempt to use a pneumatic actuator for VRA of granular fertilizer was reported (Alameen et al., 2019). The developed system showed an overall application rate error of ± 2.6 %, with a response time of 6–11 microseconds to a one-kilogram change in the application rate. However, the system recorded a drawback of irregular air pressure inside the pneumatic cylinder, which affected the system accuracy and recommend the assurance of optimum air pressure in the cylinder.
-
Hydraulic actuation systems
Based on the reports of several studies, hydraulic actuators have also been used successfully with VRA systems and are evaluated as having the capacity to work at high speeds while producing consistent forces. Similar system developed by Meng et al., (2009) suggested a map-based VRA system equipped with a hydraulic actuator used for granular fertilizers. This system reported an average application error between 1.05 % and 2.98 %. The test results of the dynamic characteristics of the developed system also showed a lag distance of 3.57 m and a system delay time of about 1.84 s. Also, in a field test conducted by Reyes et al., (2015), on an automatic map-based control system for VRA of granular fertilizers using a hydraulic actuator, the overall application errors were estimated at 5.46 % for a physical mixture of vitraurea and diammonium phosphate and 1.06 % for a Basacote Starter fertilizer. Another study recorded similar real-time N-sensor-based VRA system using a hydraulic actuator, designed and developed by Mirzakhaninafchi et al., (2021), showed that the response time between nitrogen sensing and fertilizer discharge was in the range of 3.49 to 4.90 s.
3.3 Fertilizer output flow measuring sensors
Despite the remarkable development of the systems currently used in VRA of solid fertilizers, most of them still consider the application rate calculated through the control unit using calibration equations to be the actual application rate. However, there are numerous field variables that influence the accuracy of the real application, there is still an urgent need to improve the sensors response in these systems to monitor, verify and adjust the actual solid fertilizer rates during the application process. Therefore, to achieve accurate application of solid fertilizers in agricultural fields, it is necessary to develop precise real-time measuring devices to improve the control performance via a closed-loop system. In this context, Swisher et al., (2002) developed and evaluated an optical sensor, using a laser line generator and a 32-element photodiode array to measure the granular fertilizer output rate of an air fertilizer applicator (Fig. 8). The static laboratory test of the developed sensor showed strong linear relationship between the sensor output rate and the fertilizer mass flow rate, with R2 of 0.98 and 0.99 respectively. While, the dynamic test results showed that the sensor achieved good results in measuring the variable flow rate, with reference to some limitations in the data analysis algorithm. Tola et al. (2008) developed a feedback system for measuring the granular fertilizer output flow rate using an incremental encoder connected to a circular steel plate placed on the top level of the fertilizer, to continuously measure the fertilizer depth inside the fertilizer hopper of the planter. The data collected through incremental encoder was converted into output application rate based on the calibration equations of the system. The developed feedback system showed high accuracy (R2 = 0.99) in measuring the fertilizer output rate. They tracked, checked, and reset the real-time granular fertilizer rates using the developed feedback system. Yu et al. (2019) has developed a real-time measurement system, based on a weighing sensor, to measure the application rates of solid fertilizers and seeds in the seed-drill (Fig. 9). This system showed good measurement accuracy with an average cumulative application rate error of 2.62 %. However, 3.15 % application rate's measurement error was recorded in the dynamic rate measurement performance tests.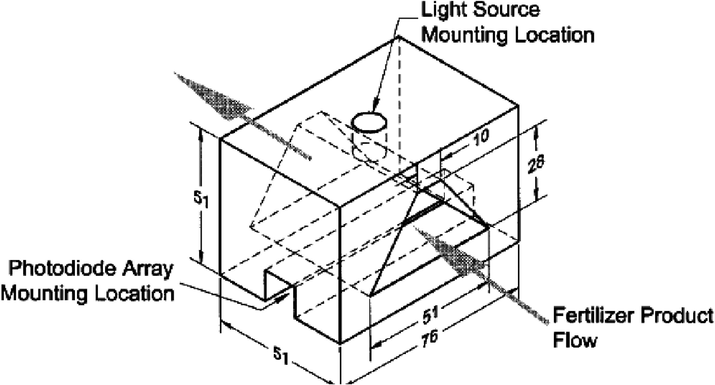
Sensing chamber configuration (Swisher et al., 2002).
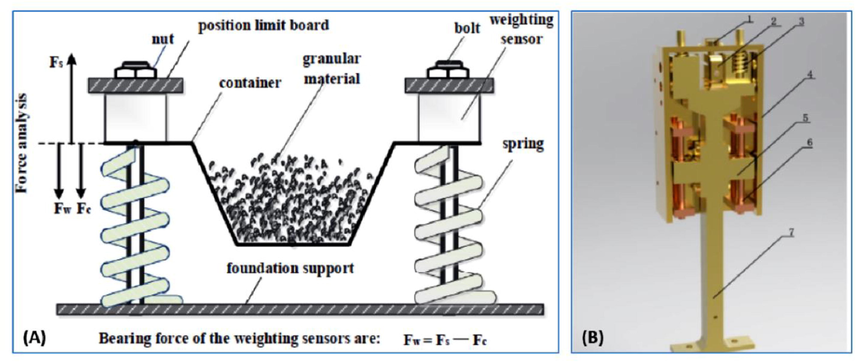
A solid fertilizer and seed application rate measuring system for seed-drills (Yu et al., 2019). (A) the principal diagram, and (B) the mechanical structure diagram: (1) sensor connection bolts, (2) weighing sensor, (3) spring, (4) box connection kits, (5) linear bearing seat, (6) guide shaft, and (7) support frame.
Commercially, the Mütec Company has developed a Mass Flow sensor (MF-3000) to measure the flow of bulk materials (granulates, powders and dusts) inside pneumatic conveyors and free fall processes from a few kg h−1 up to several t h−1 (Fig. 10). The MF-3000 measures the flow of particles in metallic pipes using microwave technology, with an accuracy of 1–3 % (Mütec, 2021). The Mütec MF-3000 sensor has been successfully used by SEMRAD Company (2021) to detect aluminum oxide continuously in the reactor output pipe. For material flow measurements, the MF-3000 measuring system has been successfully installed in the output pipe of the emission control reactor, and the results indicated that the accuracy of measuring the flow rate was ± 2 %. Therefore, MF-3000 sensor is suitable as feedback measuring system for VRA of solid fertilizers.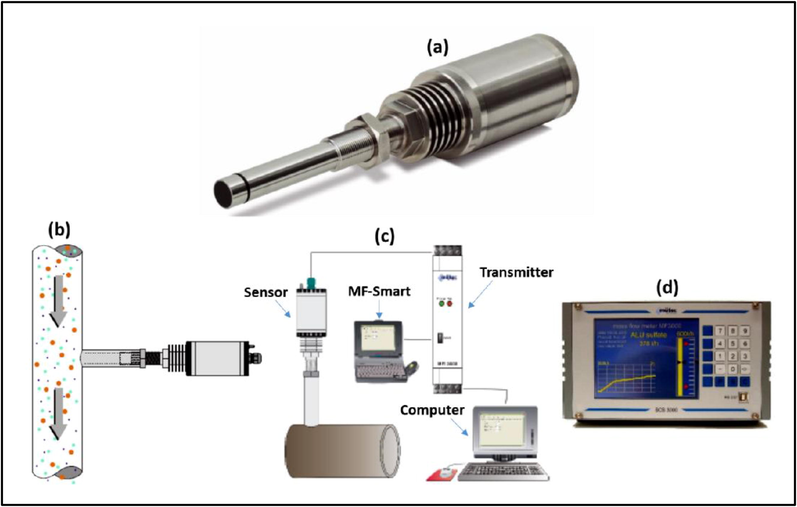
MF-3000 mass flow measuring system for solids (Mütec, 2021): (a) MF-3000 mass flow-sensor, (b) installation and commissioning, (c) system structure, and (d) communication unit/display.
4 Conclusions
The significance of VRA is underscored by both its economic and environmental implications; however, more investigation is required about how variable-rate fertilizer applicators can be made more effective, particularly through the collaboration of various crucial areas of precision agriculture research. Now if we think of including prescription maps with soil and plant status indications during the sensing process, it could result in even greater cost savings and accuracy. However, by combining these three, a more effective model might be used for more correctly estimating the appropriate fertilizer amount to spread.
Although VRA technology is steadily spreading and offering significant benefits in the management of agricultural inputs, there are still some technical limitations that need to be addressed and improved by companies and researchers. This article has provided a comprehensive review on the progress of VRA of solid fertilizers. The conclusions of this study include the following:
-
There is a clear development in the techniques for VRA of solid fertilizers for both map-based and sensor-based systems.
-
There are currently several types of control systems that have been used successfully and efficiently for VRA of solid fertilizers, giving stakeholders a comprehensive view to choose the best and most suitable system for their fields and crops.
-
Although VRA of agricultural inputs has become an essential component of modern agricultural practices, most of the developed VRA systems still lack accurate feedback systems to monitor, verify and reset the application rates on-the-go.
-
Overall, there is still an urgent need for more experiments and researches to come up with practical solutions for accurate and effective feedback systems to optimize the VRA systems for solid fertilizers. Furthermore, by concurrently planting the crop, this could contribute to environmental protection by preventing the wasteful application of additional fertilizer and minimizing the use of machinery in the field.
CRediT authorship contribution statement
Khalid A. Al-Gaadi: Conceptualization, Methodology, Writing – original draft. ElKamil Tola: Conceptualization, Methodology, Writing – original draft. Ahmed A. Alameen: Conceptualization, Methodology, Writing – original draft. Rangaswamy Madugundu: Conceptualization, Methodology. Samy A. Marey: Conceptualization, Methodology. Ahmed M. Zeyada: Methodology. Mohamed K. Edrris: Methodology.
Acknowledgment
The authors are grateful to the Deanship of Scientific Research, King Saud University, Riyadh, Saudi Arabia for funding this study through the Vice Deanship of Scientific Research Chairs.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Variable rate technology and variable rate application. In Satellite Farming: Springer; 2018. p. :67-80.
- Development and performance evaluation of a control system for variable rate granular fertilizer application. Comput. Electron. Agric.. 2019;160:31-39.
- [Google Scholar]
- Variable rate application technology for optimizing alfalfa production in arid climate. Int. J. Agric. Biol.. 2015;17
- [Google Scholar]
- Cambouris AN, Nolin MC, Simard RR. Precision management of fertilizer phosphorus and potassium for potato in Quebec, Canada. In Proceedings of the Proceedings of the Fourth International Conference on Precision Agriculture. 1999: 847-857.
- Variable rate spreader for real-time spot-application of granular fertilizer in wild blueberry. Comput. Electron. Agric.. 2014;100:70-78.
- [Google Scholar]
- A fixed-amount and variable-rate fertilizer applicator based on pulse width modulation. Comput. Electron. Agric.. 2018;148:330-336.
- [Google Scholar]
- Chunying L, Xi W. Variable-rate fertilization control system based on fuzzy PID control strategy. In Proceedings of the 2010 International Conference on Electrical and Control Engineering. 2010: 2511-2514.
- An approach for precision farming under pivot irrigation system using remote sensing and GIS techniques. Agric. Water Manag. 2011;98:517-531.
- [Google Scholar]
- Ess DR, Morgan MT, Parson S. Implementing site-specific management: map-versus sensor-based variable rate application. Pub. No. SSM-2-W, Site-Specific Management Center, Purdue University, West Lafayette, IN 2001.
- Grisso RD, Alley MM, Holshouser DL, Thomason WE. Precision farming tools. soil electrical conductivity. 2005.
- Assessing correlation of high-resolution NDVI with fertilizer application level and yield of rice and wheat crops using small UAVs. Remote Sens. (Basel). 2019;11:112.
- [Google Scholar]
- Hammond MW. Cost analysis of variable fertility management of phosphorus and potassium for potato production in central Washington. In Proceedings of the Proceedings of soil specific crop management: a workshop on research and development issues. 1993: 213-228.
- Modeling and simulation of a multi-parametric fuzzy expert system for variable rate nitrogen application. Comput. Electron. Agric.. 2021;182:106008
- [Google Scholar]
- Iida M, Umeda M, Radite P. Variable rate fertilizer applicator for paddy field. In Proceedings of the 2001 ASAE Annual Meeting. 1998: 1.
- Development and performance assessment of a DC electric variable-rate controller for use on grain drills. Comput. Electron. Agric.. 2010;73:56-65.
- [Google Scholar]
- Soil-specific nitrogen management on mid-Atlantic coastal plain soils. Better Crops.. 1999;83:6-7.
- [Google Scholar]
- Variable rate fertilization for maize and its effects based on the site-specific soil fertility and yield. Agric. Eng. Int. CIGR J.. 2008;X:1-10.
- [Google Scholar]
- Loghavi M, Forouzanmehr E. Design, Development and Field Evaluation of a Map-Based Variable Rate Granular Application Control System. In Proceedings of the 2010 Pittsburgh, Pennsylvania, June 20-June 23. 2010; 2010: 1.
- On-the-go variable-rate phosphorus fertilisation based on a visible and near-infrared soil sensor. Biosyst. Eng.. 2008;99:35-46.
- [Google Scholar]
- Development and performance assessment of map-based variable rate granule application system. J. Jiangsu Univ.-Nat. Sci. Ed.. 2009;30:338-342.
- [Google Scholar]
- Design and development of a variable rate applicator for real-time application of fertilizer. Sustainability. 2021;13:8694.
- [Google Scholar]
- The precision-farming guide for agriculturists. Deere and Company; 1997.
- On-line measurement of some selected soil properties using a VIS–NIR sensor. Soil Tillage Res.. 2007;93:13-27.
- [Google Scholar]
- Closing yield gaps through nutrient and water management. Nature. 2012;490:254-257.
- [Google Scholar]
- Twenty five years of remote sensing in precision agriculture: key advances and remaining knowledge gaps. Biosyst. Eng.. 2013;114:358-371.
- [Google Scholar]
- Mütec Company. Micro-flow MF-3000 mass flow measuring system for solids. MF-3000 manual: MF-SMART-program for calibration and parameterization. Mütec Instruments GmbH. 2021; Accessed on June 8, 2022 from: https://www.merconautomation.com/files/attachments/Muetec_MF3000_Instrukcja_EN.pdf.
- ISO 11783-compatible industrial sensor and control systems and related research: a review. Comput. Electron. Agric.. 2019;163:104863
- [Google Scholar]
- Considerations in mapping soil properties or what about this grid sampling. Crop Insights. 1996;6:1-10.
- [Google Scholar]
- Field testing of an automatic control system for variable rate fertilizer application. Comput. Electron. Agric.. 2015;113:260-265.
- [Google Scholar]
- SEMRAD Company. Mass flow measurement of aluminium oxide at Trimet Aluminium AG. SEMRAD for Process, Control and Monitoring. 2021; Accessed on June 8, 2022 from: https://www.semrad.com.au.
- Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric.. 2021;180:105832
- [Google Scholar]
- Sudduth K.A. Engineering technologies for precision farming. In Proceedings of the International seminar on agricultural mechanization technology for precision farming. 1999: 5-27.
- Performance assessment of a variable-rate fertilizer applicator. J. Agric. Sci.. 2019;11:25-30.
- [Google Scholar]
- Optical sensor for granular fertilizer flow rate measurement. Trans. ASAE. 2002;45:881.
- [Google Scholar]
- Pneumatic system for granular fertilizer flow rate control. Middle-East J. Sci. Res.. 2011;8:688-693.
- [Google Scholar]
- Granular fertiliser application rate control system with integrated output volume measurement. Biosyst. Eng.. 2008;101:411-416.
- [Google Scholar]
- Plant density and competition. In Principles of Agronomy for Sustainable Agriculture: Springer; 2016. p. :159-168.
- Head rice yield of “super” hybrid rice Liangyoupeijiu grown under different nitrogen rates. Field Crop Res.. 2012;134:71-79.
- [Google Scholar]
- A solid fertilizer and seed application rate measuring system for a seed-fertilizer drill machine. Comput. Electron. Agric.. 2019;162:836-844.
- [Google Scholar]
- Yu J, Kim Y, Ryu K. Development of a controller for variable-rate application of granular fertilizer in paddy farming. In Proceedings of the 2006 ASAE Annual Meeting. 2006: 1.




