

Translate this page into:
Approximate solution of integro-differential equation of fractional (arbitrary) order
⁎Corresponding author. akilic@upm.edu.my (Adem Kılıçman),
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
In the present paper, we study the integro-differential equations which are combination of differential and Fredholm–Volterra equations that have the fractional order with constant coefficients by the homotopy perturbation and the variational iteration. The fractional derivatives are described in Caputo sense. Some illustrative examples are presented.
Keywords
Fractional calculus
Homotopy perturbation method
The variational iteration method
Fractional integro-differential equations

1 Introduction
During the past decades, the topic of fractional calculus has attracted many scientists and researchers due to its applications in many areas, see Podlubny (1999), Gaul et al. (1991), Glockle and Nonnenmacher (1995); Hilfert (2000). Thus several researchers have investigated existence results for solutions to fractional differential equations due to the fact that many mathematical formulations of physical phenomena lead to integro-differential equations, for instance, mostly these types of equations arise in continuum and statistical mechanics and chemical kinetics, fluid dynamics, and biological models, for more details see Baleanu et al. (2012), Kythe and Puri (2002), Mainardi (1997).
Integro-differential equations are usually difficult to solve analytically, so it is required to obtain an efficient approximate solution. The homotopy perturbation method and variational iteration method which are proposed by He (1999a,b) are of the methods which have received much concern. These methods have been successfully applied by many authors such as Abbasbandy (2007), Abdulaziz et al. (2008); Yıldırım (2008). In this work, we study the Integro-differential equations which are combination of differential and Fredholm–Volterra equations that have the fractional order. In particular, we applied the HPM and VIM for fractional Fredholm Integro-differential equations with constant coefficients of the form
2 Preliminaries
In this section, we give some basic definitions and properties of fractional calculus theory which are used in this paper.
A real function is said to be in space if there exists a real number , such that where , and it is said to be in the space if .
The Riemann–Liouville fractional integral operator of order
of a function
is defined as:
For and , some properties of the operator
The Caputo fractional derivative of
is defined as:
if , then the following two properties hold
3 Homotopy perturbation method
The homotopy perturbation method first proposed by He (2005, 2006) is applied to various problems (He, 2005,, 2006, 2000, 2003).
To illustrate the basic idea of this method, we consider the following nonlinear differential equation
In general, the operator A can be divided into two parts L and N, where L is linear, while N is nonlinear. Eq. (3.1) therefore can be rewritten as follows
From Eqs. (3.4), (3.5) we have
Now, assume that the solution of Eqs. (3.4), (3.5) can be expressed as
4 The variational iteration method
To illustrate the basic concepts of VIM, we consider the following differential equation
According to VIM, one constructs a correction functional as follows
For the analysis of HPM and VIM we refer the reader to Kadem and Kilicman (2012); Elbeleze et al. (2012).
5 Numerical examples
In this section, we have applied the homotopy perturbation method and variational iteration method to linear and nonlinear Fredholm Integro-differential equations of fractional order with known exact solution
Consider the following linear Fredholm integro-differential equation:
-
HPM According to HPM, we construct the following homotopy:
(5.3)Substitution of (3.8) in (5.3) and then equating the terms with same powers of p we get the series(5.4)Now applying the operator to Eqs. (5.4). In order to satisfy the boundary conditions and convenient calculation, we will choose as follows:(5.5)Then by solving Eqs. (5.5), we obtain as Now, we can form the 2-term approximation(5.6)where A can be determined by imposing initial-boundary conditions (5.2) on . Table 1 shows the value of A for different values of α. -
VIM According to the variational iteration method, Eq. (5.1) can be expressed in the following form:
(5.7)Then, in order to avoid the complex and difficult fractional integration, we can take the truncated Taylor expansions for exponential term in (5.7) for example, and further, suppose that an initial approximation has the following form which satisfies the initial-boundary conditions(5.8)Now by iteration formula (5.7), the first approximation takes the following form(5.9)By imposing initial-boundary conditions (5.2) on .
Consider the following nonlinear Fredholm integro-differential equation:
Consider the following linear Fredholm integro-differential equation:
Consider the following nonlinear Fredholm integro-differential equation:
| 0.1452034490 | 0.4549747740 | 0.7244709330 | 0.9516151533 | |
| 1.432940029 | 1.241066017 | 1.138179159 | 1.108032497 |
6 Results and discussion
The FIDEs with initial-boundary conditions have been solved by using HPM and VIM. Based on preliminary calculations, we decided to use 2-term in HPM and first-order in VIM solutions. We note that increasing the number of terms improves the accuracy of HPM solutions.
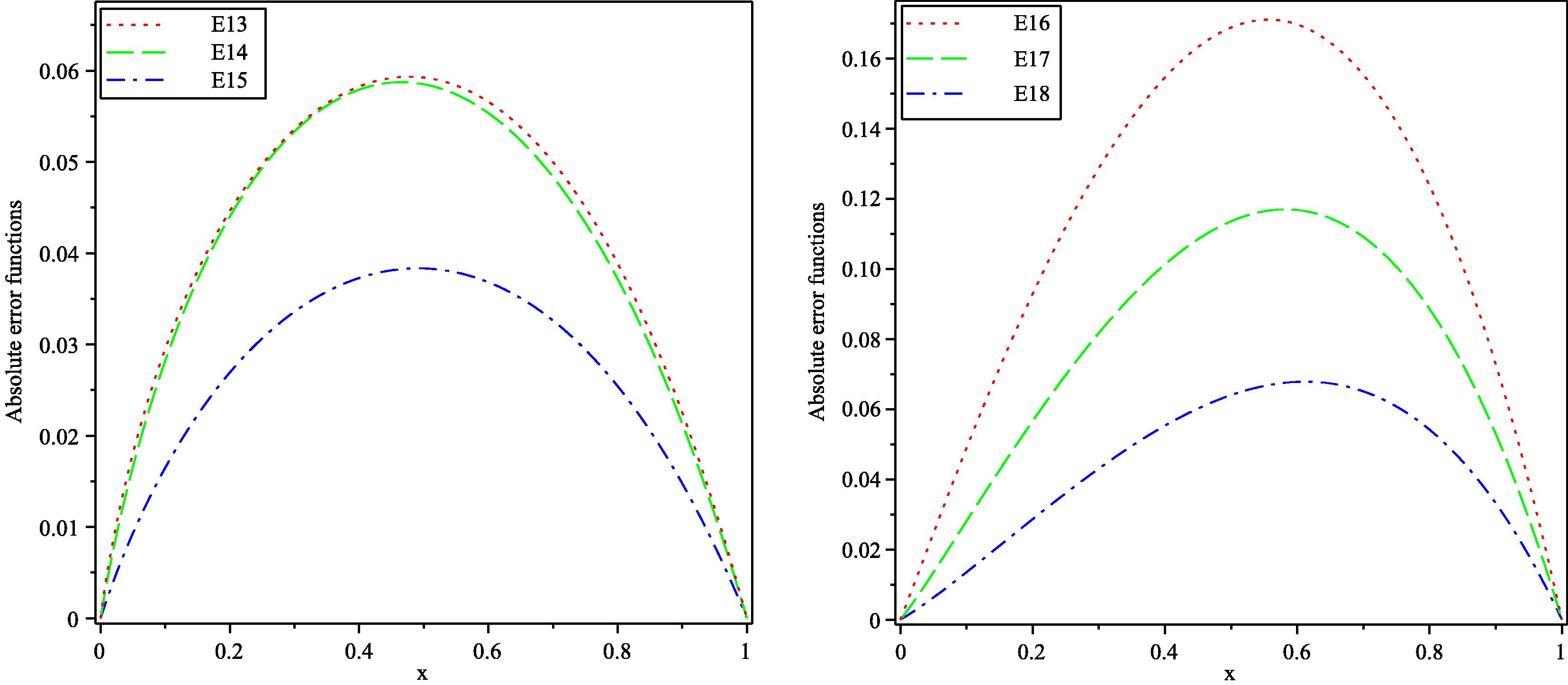
Table (1) shows the values of A for different values of α using (5.6) and (5.9). In Fig. (1) absolute error functions
, and
by HPM,
, and
by VIM for different values of α, where
have been drawn. From this figure we can see that the absolute error for
is smaller than the absolute errors for
in both methods. In addition, the absolute errors for all α slightly increased from 0 till reaching a maximum value then slightly decreased till reaching zero at
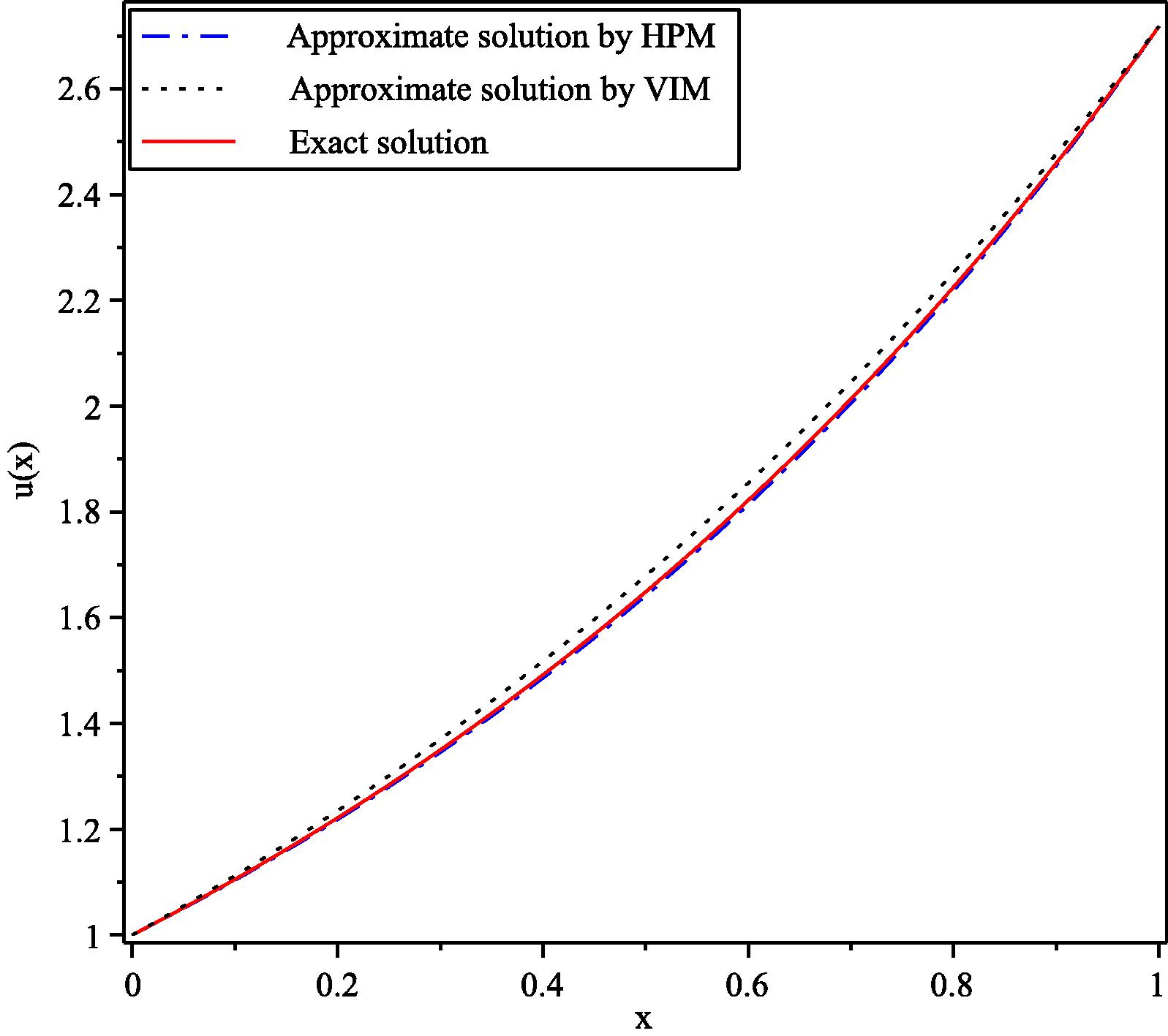
. It can be observed from this figure that increasing the accuracy of the HPM and VIM solution by increasing the fractional derivative. While, Fig. (2) displays the approximate solution when
for HPM and VIM with exact solution.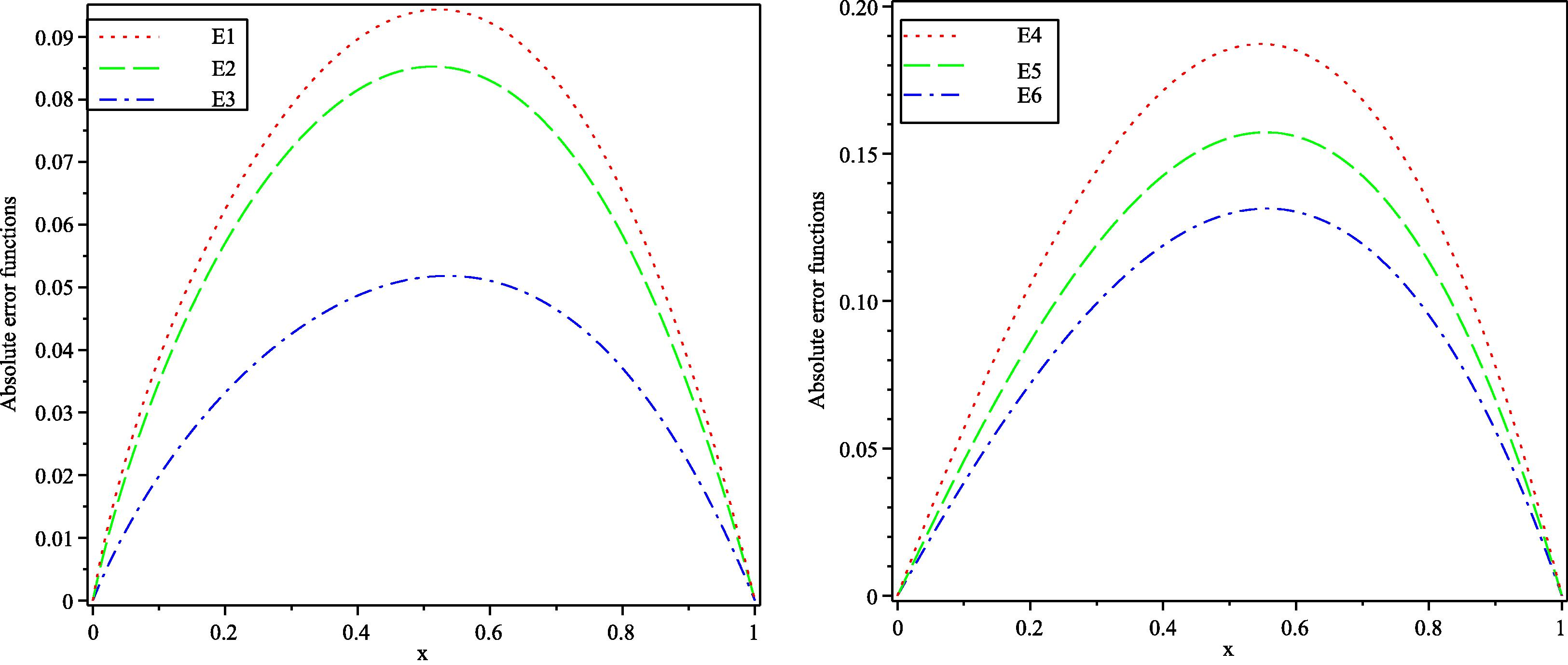
Absolute error of functions
and
obtained by 2-term HPM and
and
obtained by VIM with
for Example (5.1).
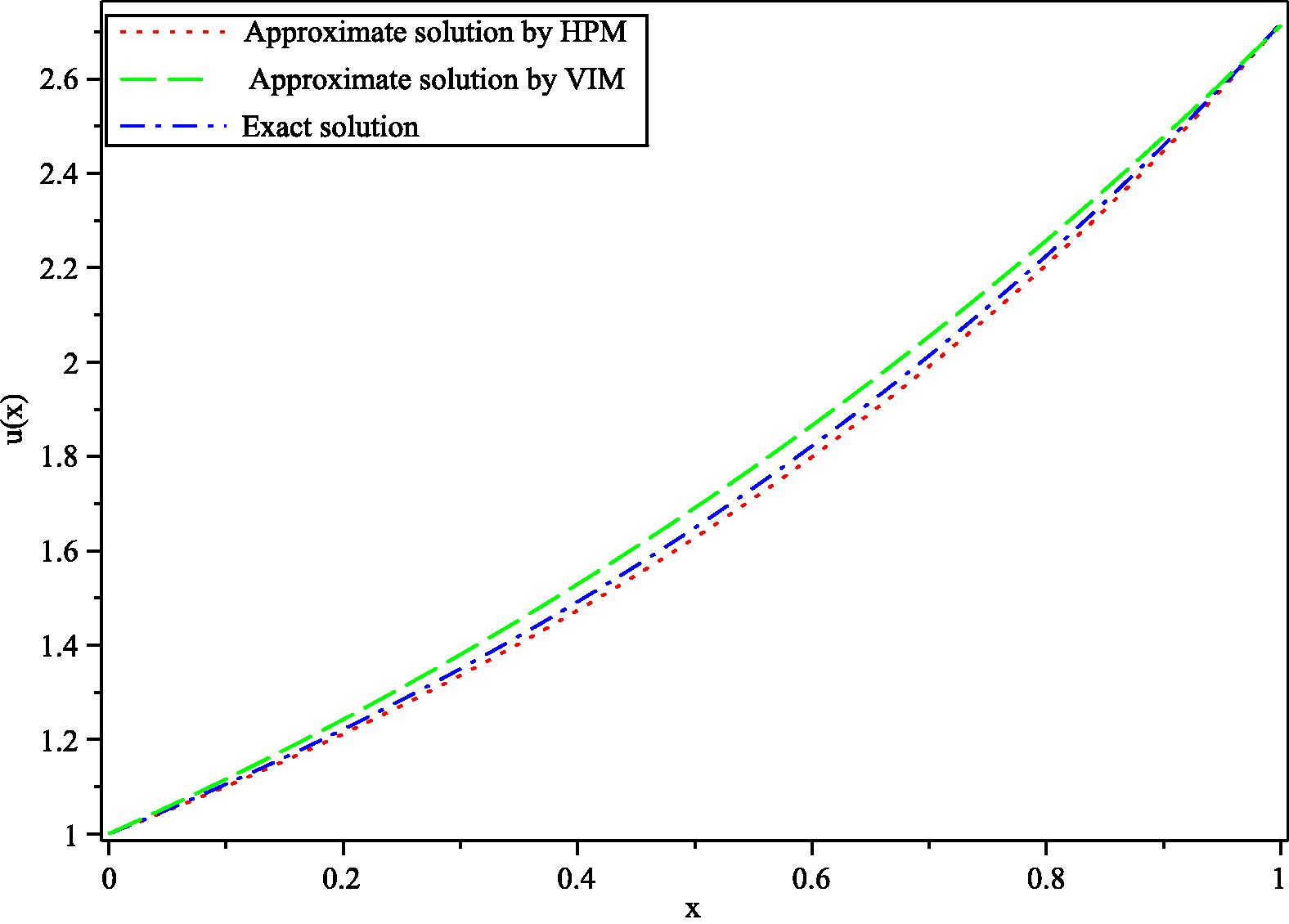
Comparison of approximate solutions obtained by 3-term HPM and with exact solution at
for Example (5.1).
Table (2) shows the values of A for different values of α using (5.12) and (5.13). The absolute error functions
,
,
by HPM and
and
by VIM of Example (5.2) for different values of α, where have been drawn in Fig. (3). From this figure we can see that the absolute error for all α by HPM smaller than the absolute errors for all α by VIM. In addition also it can be observed from this figure that increasing the accuracy of the HPM and VIM solution by increasing the fractional derivative. While, Fig. (4) displays the approximate solution
for HPM and VIM with exact solution.
1.229102855
1.154176102
1.078262573
1.005549222
0.7967121064
0.9093326779
0.9808215282
1.017387171
Absolute error of functions
and
obtained by 1-term HPM and
and
obtained by VIM with
for Example (5.2).
Comparison of approximate solutions obtained by 2-term HPM with exact solution at
for Example 5.2.
Table (3) shows the values of A for different values of α using (5.16) and (5.17). The absolute error functions
,
,
by HPM and
and
by VIM of Example (5.3) for different values of α, have been drawn in Fig. (5). From this figure we can see that the absolute error for
is smaller than the absolute errors for
in both methods. In addition, the absolute errors for all α slightly increase from 0 till reaching a maximum value then slightly decreased till reaching zero at
. Also, we can see that the absolute error for all α by HPM is smaller than the absolute errors for all α by VIM. It can be observed from this figure that increasing the accuracy of the HPM and VIM solution by increasing the fractional derivative. While, Fig. (6) displays the approximate solution
for HPM and VIM with exact solution.
0.2375025470
0.5218416880
0.7720691390
0.9849484867
1.411203960
1.208885080
1.100882101
1.068880597
Absolute error of functions
and
obtained by 1-term HPM and
and
obtained by VIM with
for Example (5.3).
Comparison of approximate solutions obtained by 2-term HPM with exact solution at
for Example (5.3).
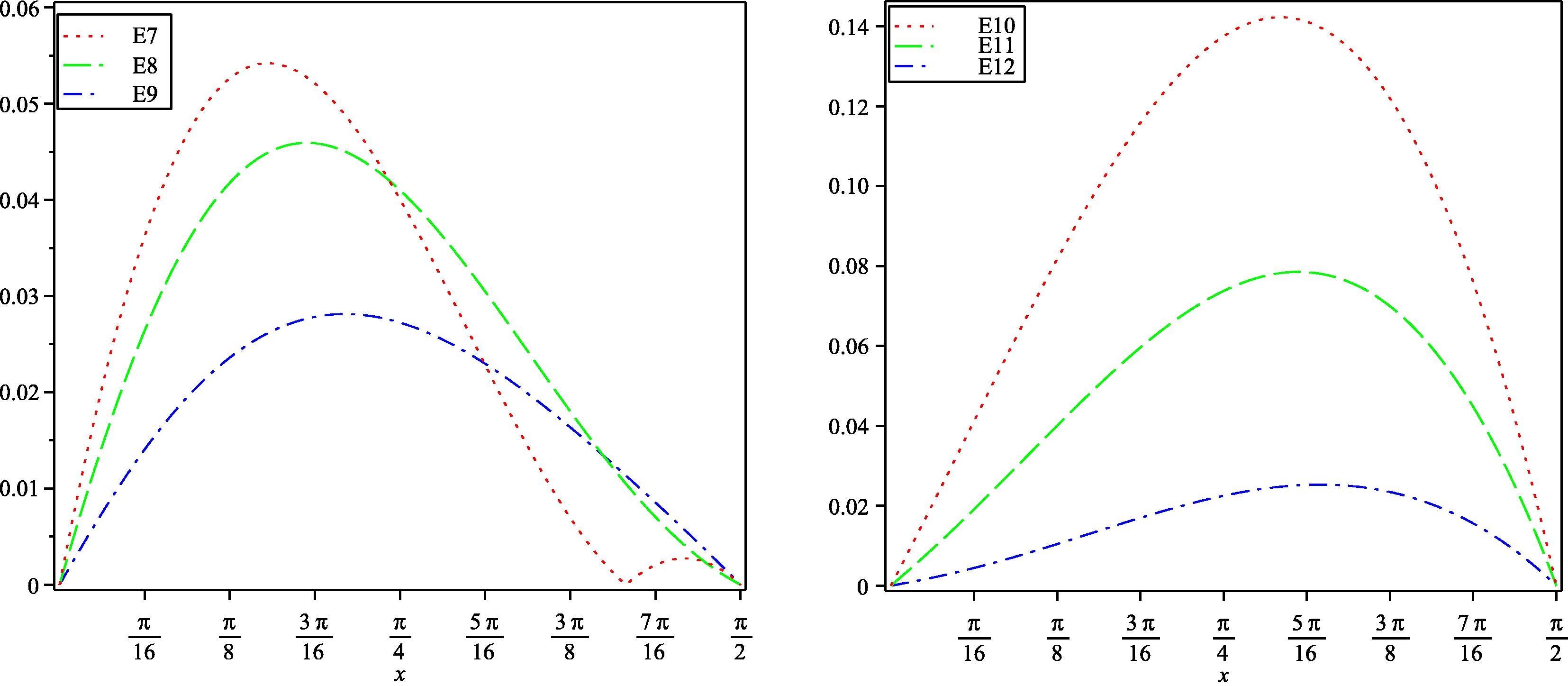
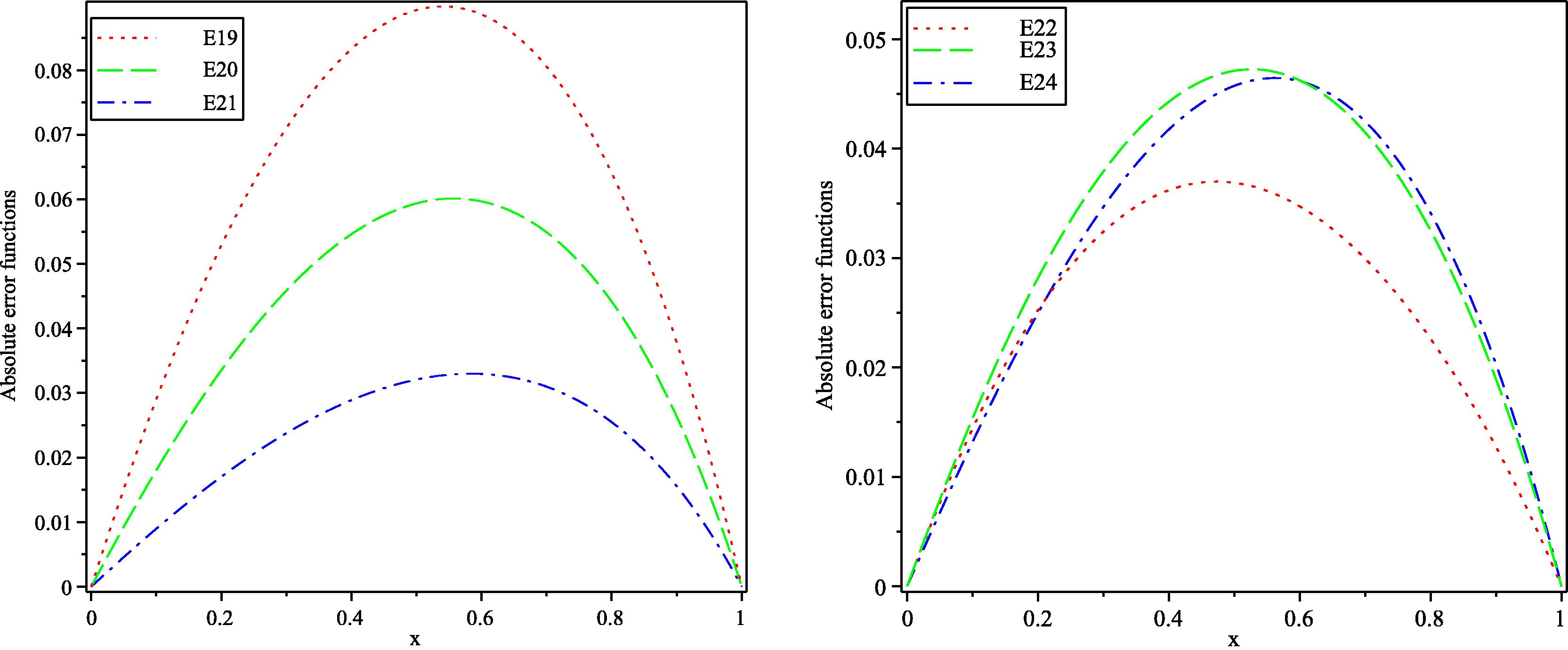
Table (4) shows the values of A for different values of α using (5.20) and (5.21). The absolute error functions
,
,
by HPM and
and
by VIM of Example (5.4) for different values of α, have been drawn in Fig. (7). From this figure we can see that the maximum absolute error for
by HPM is smaller than the absolute errors for
by VIM, while the maximum absolute error for
by HPM is greater than the maximum absolute error for
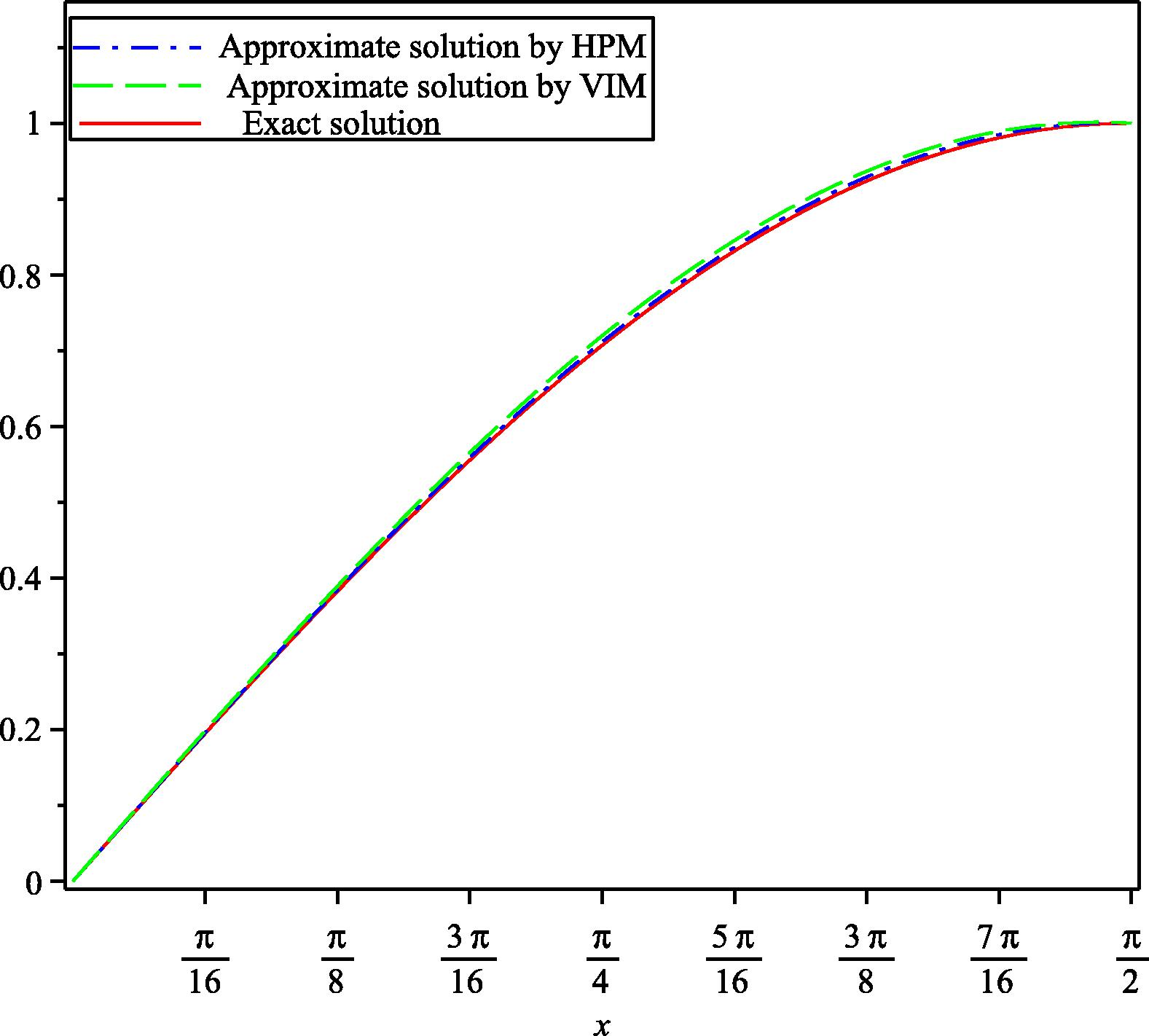
by VIM. Fig. (8) displays the approximate solution
for HPM and VIM with exact solution.
0.6894636978
0.8118993456
0.9079287321
0.9816578735
0.8410301049
0.8387819527
0.8648448808
0.9053789914
Absolute error of functions
and
obtained by 1-term HPM and
and
obtained by VIM with
for Example (5.4).
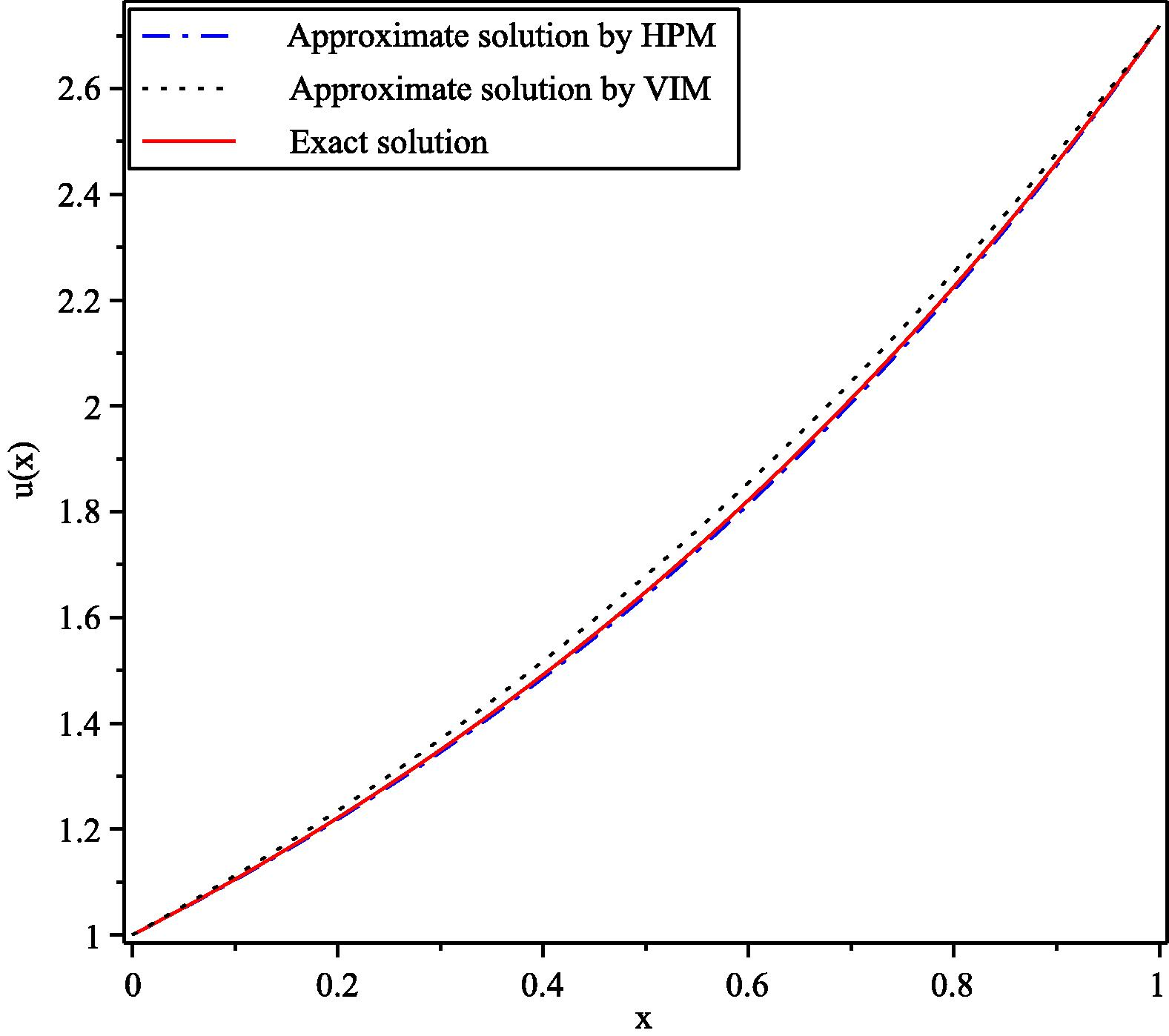
Comparison of approximate solutions obtained by 2-term HPM with exact solution at
for Example 5.4.
Overall, it can be seen that the approximate solution is in excellent agreement with exact solution. Also, it is to be noted that the accuracy can be improved by computing more terms of approximated solution and/or by taking more terms in the Taylor expansion of the exponential term.
References
- An approximation solution of a nonlinear equation with Riemann–Liouville’s fractional derivatives by He’s variational iteration method. J. Comput. Appl. Math.. 2007;207(1):53-58.
- [Google Scholar]
- Application of homotopy–perturbation method to fractional IVPs. J. Comput. Appl. Math.. 2008;216(2):574-584.
- [Google Scholar]
- Fractional Calculus, of Series on Complexity, Nonlinearity and Chaos. Vol vol. 3. Hackensack, NJ, USA: World Scientific; 2012.
- Application of homotopy perturbation and variational iteration methods for Fredholm integro-differential equation of fractional order. Abstr. Appl. Anal.. 2012;2012 14 p.
- [Google Scholar]
- Damping description involving fractional operators. Mech. Syst. Signal Process.. 1991;5(2):81-88.
- [Google Scholar]
- A fractional calculus approach of self-similar protein dynamics. Biophys. J.. 1995;68:46-53.
- [Google Scholar]
- Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng.. 1999;178(3–4):257-262.
- [Google Scholar]
- Variational iteration method-a kind of non-linear analytical technique: some examples. Int. J. Non-Linear Mech.. 1999;34(4):699-708.
- [Google Scholar]
- A Coupling Method of Homotopy Technique and Perturbation Technique for Nonlinear Problems. Int. J. Non-Linear Mech.. 2000;35:37-43.
- [Google Scholar]
- Homotopy perturbation method for solving boundary value problems. Phys. Lett. A. 2006;350(1–2):87-88.
- [Google Scholar]
- Application of homotopy perturbation method to nonlinear wave equations. Chaos Solitons Fract.. 2005;26(3):695-700.
- [Google Scholar]
- Homotopy perturbation method for bifurcation of nonlinear problems. Int. J. Nonlinear Sci. Numer. Simul.. 2005;6(2):87-88.
- [Google Scholar]
- Homotopy perturbation method: a new nonlinear analytic technique. Appl. Math. Comput.. 2003;135:73-79.
- [Google Scholar]
- Applications of fractional calculus in physics. River Edge, NJ, USA: World Scientific; 2000.
- The approximate solution of fractional Fredholm integrodifferential equations by variational iteration and homotopy perturbation methods. Abstr. Appl. Anal.. 2012;2012:10. Article ID 486193, 10 p.
- [Google Scholar]
- Computational methodsfor linear integralequations. Boston, Mass, USA: Birkhauser; 2002.
- An approximate solution technique not depending on small parameters: a special example. Int. J. Non-Linear Mech.. 1995;30(3):371-380.
- [Google Scholar]
- Boundary element method for general nonlinear differential operators. Eng. Anal. Boundary Elem.. 1997;20(2):91-99.
- [Google Scholar]
- Fractional calculus: some basic problems in continuum and statistical mechanics. In: Fractals and Fractional Calculus in Continuum Mechanics. In: CISM Courses and Lectures. Vol vol. 378. Vienna, Austria: Springer; 1997. p. :291-348.
- [Google Scholar]
- Fractional differential equations. In: Mathematics in Science and Engineering. Vol vol. 198. San Diego, Calif, USA: Academic Press; 1999.
- [Google Scholar]
- Solution of BVPs for fourth-order integro-differential equations by using homotopy perturbation method. Comput. Math. Appl.. 2008;56(12):3175-3180.
- [Google Scholar]




