

Translate this page into:
Study of fractional order Van der Pol equation
⁎Corresponding author. jafari@umz.ac.ir (H. Jafari) jafari.ho1@gmail.com (H. Jafari)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
In this article, Homotopy analysis method is successfully used to find the approximate solution of fractional order Van der Pol equation. The fractional derivative is described in the Caputo sense.The numerical computations of convergence control parameters for the acceleration of convergence of approximate series solution are obtained by the analysis of minimization of error for different particular cases and the results are depicted through graphs. The salient feature of the article is the graphical presentation of achieving limit cycles for different parameters.
Keywords
Oscillator equation
Damping
Homotopy analysis method
Embedding parameter
Error analysis
Limit cycle

1 Introduction
Van der Pol oscillator equation was first introduced in 1920 by Vander Pol (1920) who introduced the equation to describe the oscillation of triode in the electrical circuit. The mathematical model for this system is a second order differential equation with third degree of nonlinearity as
Many researchers have tried to solve and study the Van der Pol equation in various forms. Mickens (2001) proposed the study of a non-standard finite difference scheme for the unplugged Van der Pol equation. In 2002, Mickens (2002) studied numerically the Van der Pol equation using a non-standard finite-difference scheme . In the same year, Mickens (2002) proposed a step-size dependence of the period for a forward-Euler scheme of the Van der Pol equation. In 2003, Mickens (2003) proposed different forms of Fractional Van der Pol oscillators. Researchers have tried many methods to solve the Van der Pol differential equation using Energy balance method (Mehdipour et al., 2010; Younesian et al., 2010), Parameter expanding method (He, 2006; Xu, 2007) etc.
The Fractional order differential equations have created much interest to the researchers (Atangana and Secer, 2013) due to the non local behavior of the operator which takes into account the fact that future state depends on the present as well as on the history of the previous states. Thus fractional order derivatives are naturally related to the systems with memory which prevails for most of physical and scientific system models. Another advantage is fractional order system response ultimately converges to integer order system response. Leung et al. (2012) have used residue harmonic balance method for fractional order Van der Pol like oscillators. Gafiychuk et al. (2008) have done the analysis of fractional order Bonhoeffer Van der Pol oscillator. Leung and Guo (2011) have used forward residue harmonic balance for autonomous and non autonomous systems with fractional derivative damping. Guo et al. (2011) have given the asymptotic solution of fractional Van der Pol oscillator using the same method. Leung and Guo (2010) have used the method for discontinuous nonlinear oscillator for fractional power restoring force. Sardar et al. (2009) have found the approximate analytical solution of multi term fractionally damped Van der Pol equation. Konuralp et al. (2009) studied numerical solution of Van der Pol equation with fractional damping term. Pereira et al. (2004) have proposed a fractional order Van der Pol equation as
2 Solution of the Problem by HAM
The Eq. (5) can be rewritten as
The linear auxiliary operator is
The nonlinear operator is defined as
Thus, .
Taking
, we get
(Convergence theorem) If the series solution defined by the Eq. (18) is convergent then it converges to an exact solution of the nonlinear problem (6).
See Theorem 4.21 and Theorem 4.22 in the monograph of Liao (2012). □
3 Numerical results and discussion
In this section, the numerical results of
for the considered non-linear fractional Van der Pol oscillator equation have been obtained. The optimal values of
, for comparison of minimum residual errors for
and various values of
are provided through Tables 1–3 and are displayed through Figs. 1–3. It is observed from Tables 1–3 that with increase in the order of approximations, the residual error is decreasing and optimal value of
goes away from
. Tables 1–3 also depict that with decrease in the value of
, residual error is decreasing for
. The phase portraits between
and
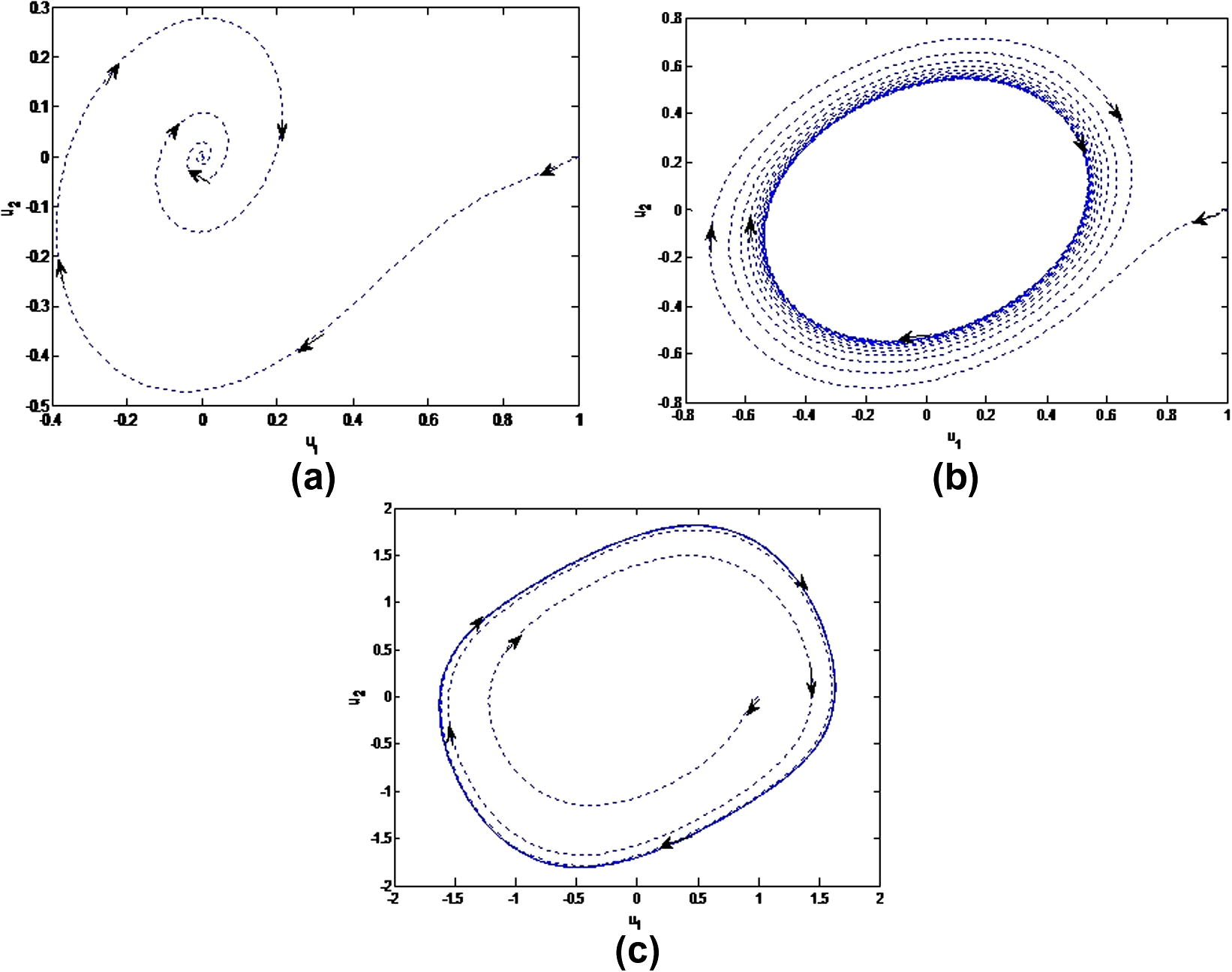
are presented through Fig. 4(a)–(c). It is observed that for
and
, system approaches towards an equilibrium point whereas for
and
the system gives us a stable limit cycle and with the increase of the values of
from
to 1, it is seen from Fig. 4(b) and (c) that amplitude of the limit cycle is increasing. In Fig. 5 drawn for
and
the same nature is found in the amplitude of the limit cycle. When
, the system approaches towards the equilibrium point at
(Fig. 6(a)). An interesting phenomenon is observed at
and
. In both occasions limit cycles obtained are displayed through Fig. 6(b) and (c). In the first case the path of the orbit approaches towards the limit cycle from outside whereas in the later one the nature is opposite. Again for
, some strange natures are found in the limit cycles at
depicted through Fig. 7 which may be described as bad bands (Guckenheimer, 1980).
Order of approximation
at
1
2
3
Order of approximation
at
1
−1.04575
2
−0.624875
3
−0.758726
Order of approximation
at
1
−1.09418
2
−0.550819
3
−0.725017
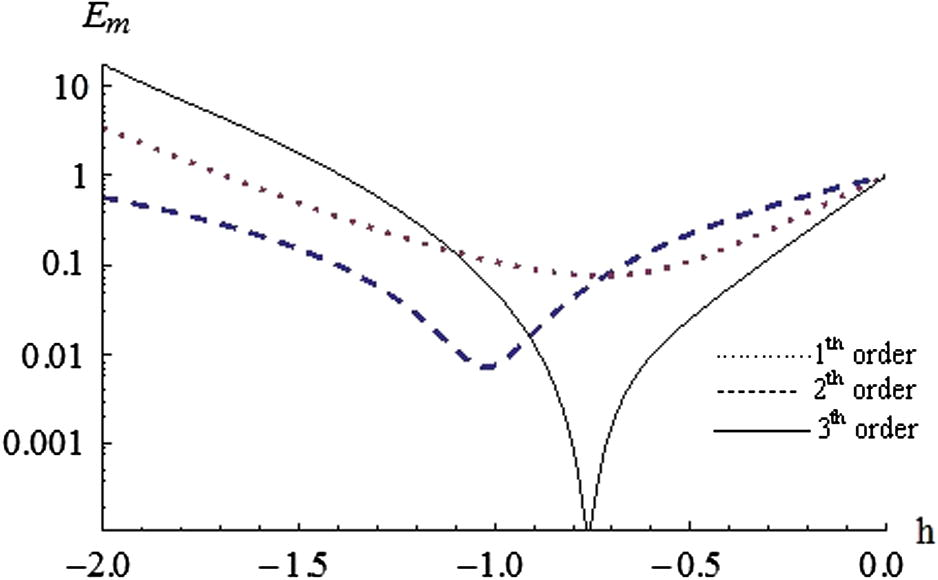
Plots of exact residual error
versus
for
and
.
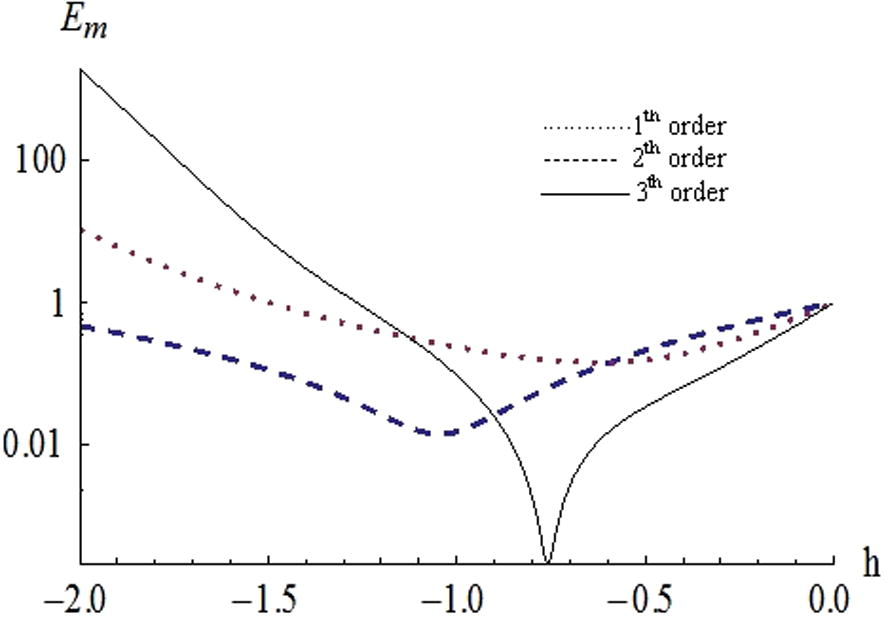
Plots of exact residual error
versus
for
and
.
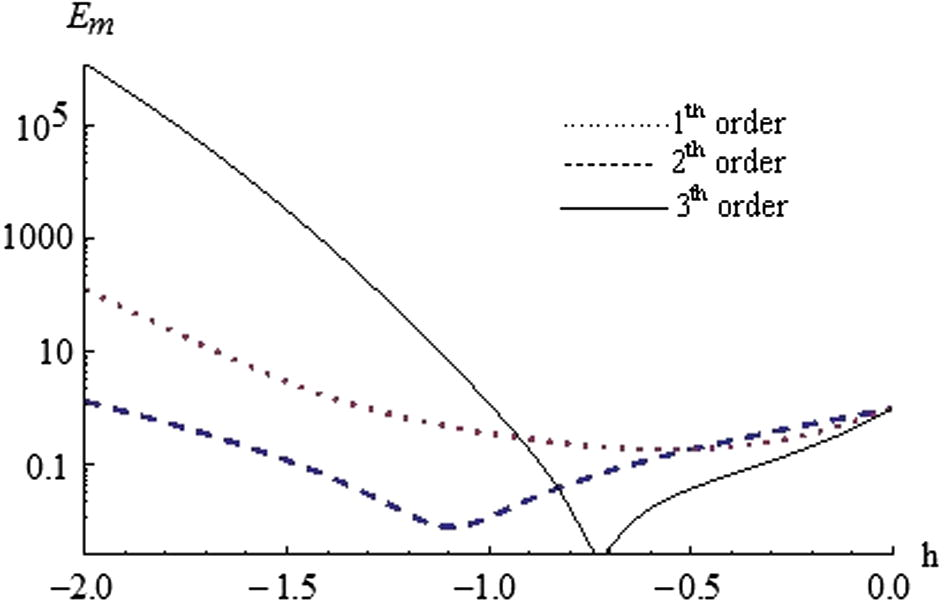
Plots of exact residual error
versus
for
and
.
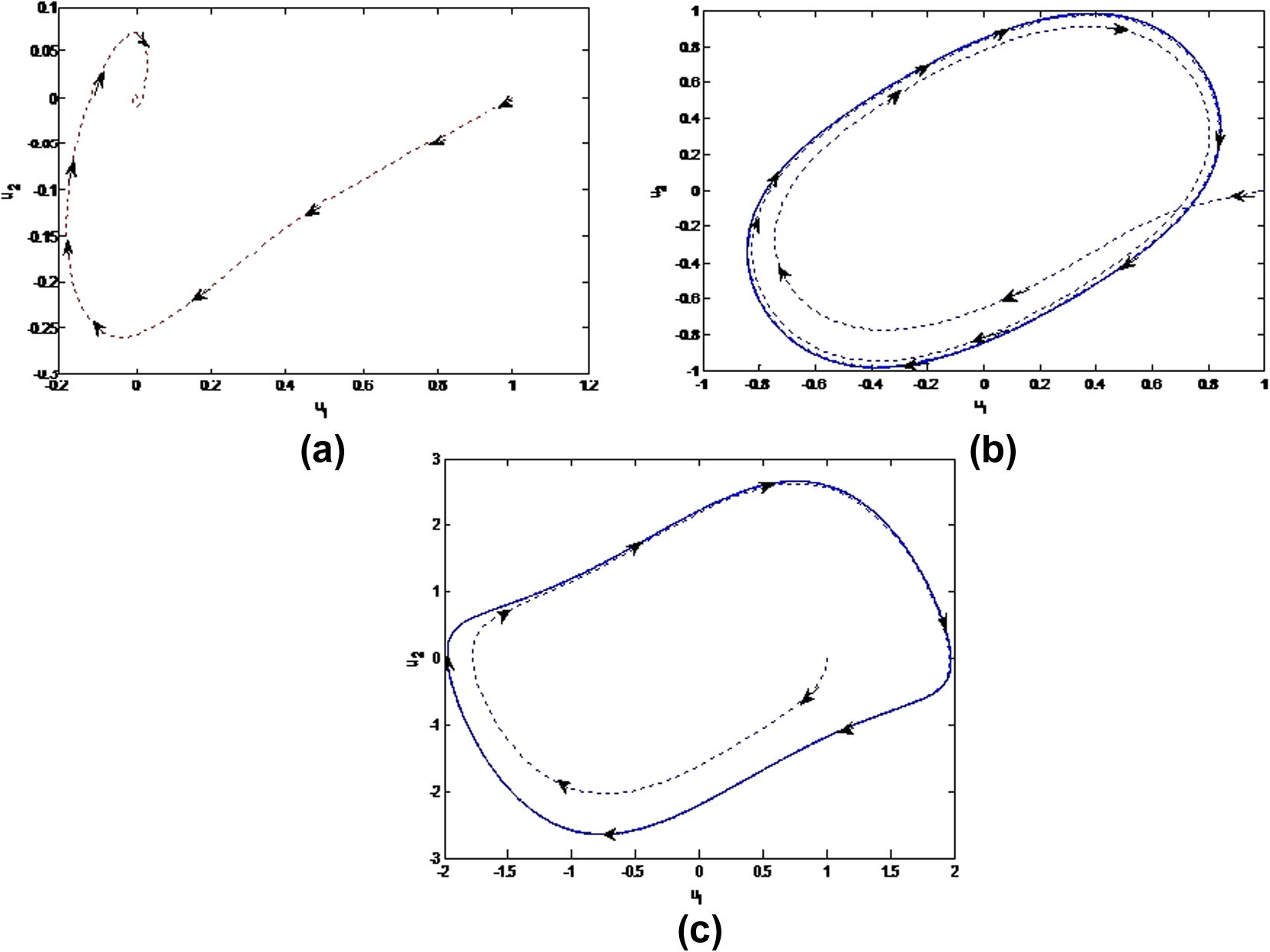
Phase Portrait between
and
(a) for
and
(b) for
and
(c) for
and
.
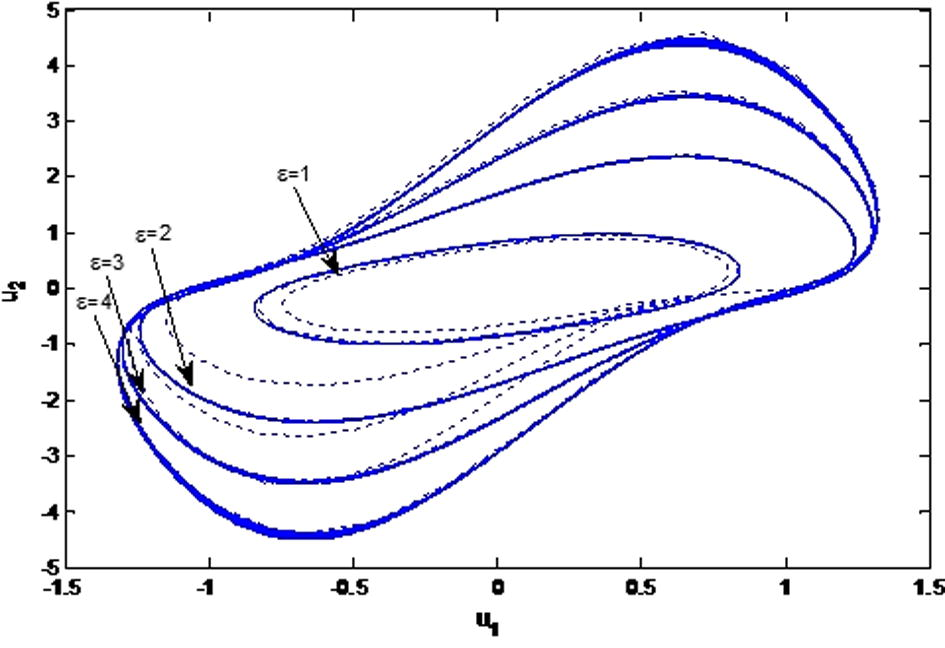
Phase Portrait between
and
for
and
.
Phase Portrait between
and
(a) for
and
(b) for
and
(c) for
and
.
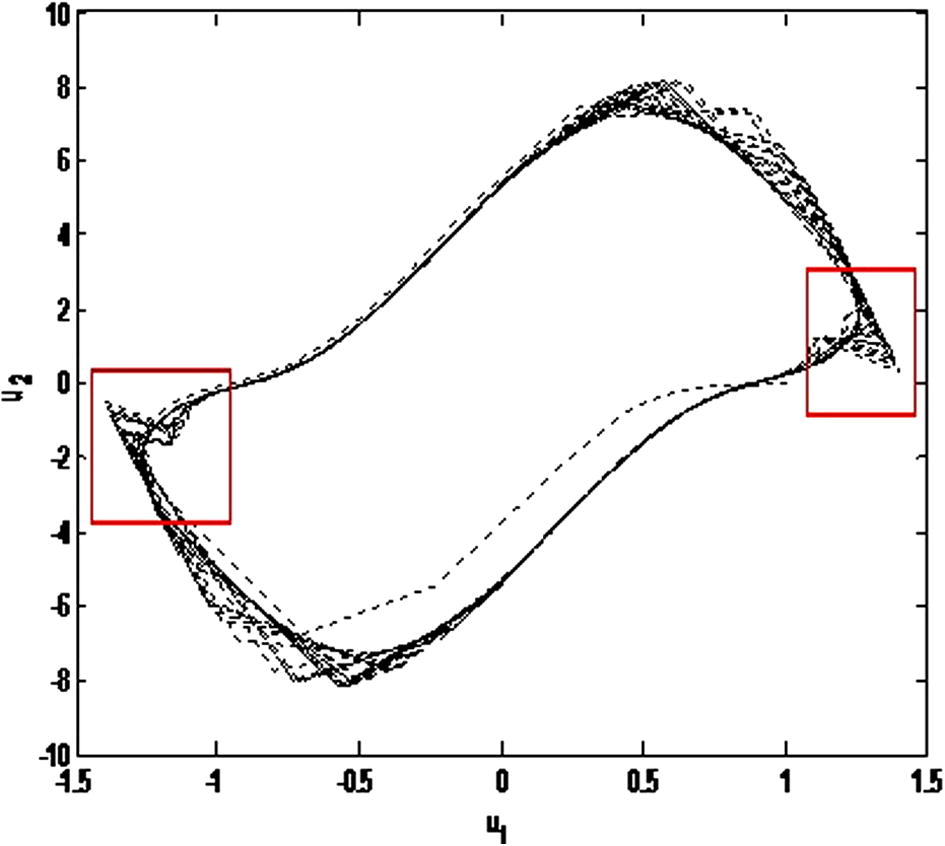
Phase Portrait between
and
for
and
.
4 Conclusion
There are two important goals that the authors have achieved in the present article. First one is how the convergence of approximate solution can be accelerated using convergence control parameter which demonstrates computationally efficient approximate solutions with low residual errors during the solution of the historical nonlinear equation in fractional order system. This clearly reveals the reliability and potential of the method HAM during the solution of nonlinear partial differential equations even in fractional order system. The second one is the observation of limit cycles for small values of when is close to the standard one, and also the large value of when is close to 0.5, which clearly demonstrate the variations of achieved stable limit cycles of the system with changes in small value of control parameter and higher value of fractional order time derivative to the large value of control parameter and small value of fractional order derivative.
References
- Convergence and stability analysis of a novel iteration method for fractional biological population equation. Neural Comput. Appl.. 2014;25:1021-1030.
- [Google Scholar]
- Abdon Atangana, Aydin Secer, 2013. A Note on Fractional Order Derivatives and Table of Fractional Derivatives of Some Special Functions, 2013, 1–8.
- Barbosa, R.S., Machado, J.A.T., Ferreira, M.I., Tar, K.J., Proceedings of the Second IEEE International Conference on Computational Cybernetics (ICCC04), Vienna University of Technology, 200, 373.
- On non-linear differential equations of the second order. J. London Math. Soc.. 1945;20:180-189.
- [Google Scholar]
- Analysis of fractional order Bonhoeffer-Van der Pol oscillator. Phys. A. 2008;387:418-424.
- [Google Scholar]
- Guckenheimer, John, 1980. Dynamics of Van der Pol Equation. IEEE Trans. Circ. Syst. Cas-27, 983–989.
- Oscillatory region and asymptotic solution of Fractional Van der Pol oscillator via residue harmonic balance technique. Appl. Math. Model.. 2011;35:3918-3925.
- [Google Scholar]
- Some asymptotic methods for strongly nonlinear equations. Int. J. Modern Phys. B. 2006;20(1):1141-1199.
- [Google Scholar]
- Numerical solution to the Van der Pol equation with fractional damping. Phys. Scripta. 2009;136:014034-014035.
- [Google Scholar]
- Residue harmonic balance for discontinuous nonlinear oscillator with fractional power restoring force. Int. J. Nonlinear Sci. Numer. Simul.. 2010;11:705-723.
- [Google Scholar]
- Forward residue harmonic balance for autonomous and non-autonomous systems with fractional derivative damping. Commun. Nonlinear Sci. Numer. Simul.. 2011;16(9):2169-2183.
- [Google Scholar]
- The residue harmonic balance for fractional order Van der Pol like oscillators. J. Sound Vibr.. 2012;331:1115-1126.
- [Google Scholar]
- A second order differential equation with singular solutions. Ann. Math.. 1949;50:127-153. (ser. 2nd)
- [Google Scholar]
- Liao, S.J., 1992. The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems, Ph.D. Thesis, Shanghai Jiao Tong University.
- Liao, S.J., 2012. Homotopy Analysis Method in Nonlinear Differential Equations, Higher Education Press, Beijing and Springer-Verlag Berlin, Heidelberg.
- Application of the energy balance method to nonlinear vibrating equations. Curr. Appl. Phys.. 2010;10:104-112.
- [Google Scholar]
- Analytical and numerical study of a non-standard finite difference scheme for the unplugged Van der Pol equation. J. Sound Vibr.. 2001;245(4):757-761.
- [Google Scholar]
- Numerical study of a non-standard finite-difference scheme for the Van der Pol equation. J. Sound Vibr.. 2002;250(5):955-963.
- [Google Scholar]
- Step-size dependence of the period for a forward-euler scheme of the Van der Pol equation. J. Sound Vibr.. 2002;258(1):199-202.
- [Google Scholar]
- Pereira, E., Monje, C.A., Vinagre, B.M., Gordillo, F., 2004. MATLAB tool box for the analysis of fractional order systems with hard nonlinearities. In: Proceedings of the First IFAC Congress on Fractional Differentiation and its Applications, Bordeaux (France), 214–219.
- The analytical approximate solution of the multi-term fractionally damped Van der Pol equation. Phys. Scripta. 2009;80:025003-025006.
- [Google Scholar]
- Vander Pol, B.,1920. A theory of the amplitude of free and forced triode vibrations. Radio Rev., 1, 701–710, 754–762.
- Determination of limit cycle by He’s parameter-expanding method for strongly nonlinear oscillators. J. Sound Vibr.. 2007;302:178-184.
- [Google Scholar]
- Frequency analysis of strongly nonlinear generalized Duffing oscillators using He’s frequency amplitude formulation and He’s energy balance method. Comput. Math. Appl.. 2010;59:3222-3228.
- [Google Scholar]




