

Translate this page into:
Strong -continuity and weakly -closed functions on spaces
⁎Corresponding author. hsssaadi@uqu.edu.sa (Hanan Al-Saadi),
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Abstract
In this research article, we present the procedure of generating spaces in two different ways: using the generalized neighbourhood system and the monotonic operator. Then, we introduce several types of generalized primal continuous functions. Some characteristics have been dissected, and the relationships among them have been studied. We use the technique of Császár, which changes the “generalized topology” to other “generalized topologies” weaker than it, to show some important results. Furthermore, we show that the notion of “strong -continuity” coincides with the notion “ -continuity” under some conditions. We present these results on a simple graph to make it easier for the reader. Finally, study the preservation of the notions of “ -connected” and “ -hyperconnected” by different types of generalized primal continuous functions.
Keywords
54A05
54C10
54A10
GP-continuous
GPN-continuous
Strong GP-continuous
Weakly GP-closed
GP-connected
GP-hyperconnected

1 Introduction
Continuity has been a core concept in the branch of pure mathematics in general and in the theory of topology. A function between two topological spaces is continuous if the pre-image of every open set is open. To judge whether a function is continuous, we need to examine the structure of the spaces. This nice kind of function is quite important for the role that it plays in preserving the topological structure of the domain space in the co-domain space.
In Császár (1997) the concept of generalization was established when Császár introduced the concept of generalized open set, which led to the definition of a new mathematical structure weaker than the topology, that is, having relaxing conditions. Following the scientific approach, any “generalization” to the basic concepts in the “theory of topology” must be studied. This happened when many articles drew attention to this generalized space and examined every topological characteristic. Moreover, the notion of “generalized continuous” functions between two generalized topological spaces is defined.
In Al-Saadi and Al-Malki (2023), the same methodology was followed. The author gave a new mathematical structure that connected the generalized topological properties with the primal set given on the same set. The basic definitions were given, and some operators with nice behaviour are present in Al-Saadi and Al-Malki (2024).
In this paper, we continue our study of this new space. The study focuses on “generalized continuity” under the influence of the primal set. The topic of continuity is one of the major topics in topology theory, and for that, we investigate in depth many types of continuous functions. These types are already studied in the theory of “generalization”. Here we will study them in the sense of primal collection. Also, we will study the relationship between them and state the necessary conditions to develop some weak kinds of them into strong types. The importance of continuous functions in topology comes from their effective role in preserving topological properties.
This article contains five sections. Section 1 is divided in two parts: the first one summarizes the previous studies in this research; the second part is recalling the basic definitions and the fundamental theorems. In Section 2, we present three types of continuous functions on spaces. First, we generate spaces in two different ways. One by using the generalized neighbourhood system, and the other by using the monotonic operator. Then, we give the definitions of -continuous, - -continuous, and almost -continuous; and we discuss their characteristics. The relationship among them and counterexamples have been studied. In Section 3, we introduce the notions of “strong -continuous function”, “strongly - -continuous”, and “super -continuous”. Then, study the relationship among them. Also, we present the concepts of “weakly -closed function” and “ -regular space”; and we discuss their characteristics. In Section 4, we present the notions of “ -connected” and “ -hyperconnected”. Then, we study the preservation of these notions by different types of generalized primal continuous functions. Section 5 is a discussion of all theimportant results that we present.
1.1 Literature review
In Császár (2002) the notion of “generalized topology” was presented. The collection of the power set of a non-empty set is named a generalized topology if the empty set belongs to , and the countable union of every set that belongs to also belongs to . Thus, the pair is assumed to be a generalized topological space, denoted by space.
According to Császár (2008b), this space member is named -open sets; however, -closed means its complements. Also, refers to the whole set of -closed sets, whereas and mean the closure and interior of , respectively, which are defined as in the general case. Studies continued in this generalized space. Császár (2004a) presented the concept of topological disconnection under the influence of generalization, while Császár (2005) presented the concept of generalized continuous functions. Császár (2008a) introduced the notion of “strong generalized topological space”, which is given as follows: A generalized topology is named strong if .
Moreover, this field has received a lot of attention since the literature has studied and examined its topological characteristics in detail. For example, Császár (2004b) gave the separation axioms by replacing the notion of open sets with a more general expression, while a lot of research gave the definition of generalized continuity with different types of more general kinds of continuity, for example, Min (2009b) presented the notion of almost continuity, Min (2009a) introduced the concept of -continuity, and Jayanthi (2012) gave the definition of contra continuous function.
In another direction, literature has spread that presents new mathematical structures as useful tools that lead to a deeper understanding and broader application of the concepts of topological spaces in various fields. For example, the mathematical structure “ideal” in Janković and Hamlett (1990) and its dual structure “filter” in Kuratowski (2014). These two structures have applications in science and society. The notion of ideal -space is given in Al-Omari and Noiri (2012), including some type of operator.
On the same approach, the notion of “grill” appeared in Choquet (1947). The associated topology for the grill is given in Roy and Mukherjee (2007). New types of mapping were presented and compactness in the light of a grill in Roy et al. (2008). The generalized type of continuity and its decomposition via grill set are defined and studied in Hatir and Jafari (2010).
In 2022, the dual structure of the “grill” is defined and named “primal” in Acharjee et al. (2022). A family is called a primal over , if the next are satisfied for : (i) . (ii) Whenever and , thus . (iii) Whenever , thus or . Some operators are given via a “primal set” and presented in AL-Omari et al. (2022). Also, Modak (2013) follows the same approach and definition of new space via the notion of filter and grill. In Al-shami et al. (2023) a new space is defined by joining the nice properties of primal and soft sets.
1.2 spaces
Through this part, we will review the basic definitions of spaces, that are presented in Al-Saadi and Al-Malki (2023) and Al-Saadi and Al-Malki (2024)
The triple refers to the generalized primal topological space space for short. Moreover, -open sets is the symbol for the element of this space, and -closed sets denote their complement. The entire set of -closed set is symbolized by and denotes the closure of , that is qualified as in the general situation.
Let be a space. Consider an operator given as , for all . Hence, is a generalized primal neighbourhood or for , and is a generalized primal neighbourhood system over or system. The set of all systems on is denoted by .
Let be a space with . The operator is defined by
Let be a space. The next holds for .
-
.
-
is -closed i.e., .
-
.
-
, whenever, .
-
.
-
.
Let be a space with . We define the operator by .
Let be a space. The next holds for .
-
,
-
,
-
,
-
, whenever ,
-
.
Let be a space with . We have , whenever is -open.
Let be a space and .
-
Whenever , is called -semi-open set.
-
Whenever , is called -pre-open set.
-
Whenever , is called -regular open set.
-
Whenever , is called - -open set.
-
Whenever , is called - -openset.
The entire set of -semi-opensets is denoted via , and the entire set of -pre-open setsis denoted via . Moreover, the entire set of - -open sets is denoted via , while represents the whole set of - -open sets. Finally, represents the whole set of -regularopen sets.
Let be a space and . If is a -semi-open (resp. -pre-open, -regular open, - -open, - -open), hence is called a -semi-closed (resp. -pre-closed, -regular closed, - -closed, - -closed).
Let be a space. We have:
-
such that each also belongs to .
-
such that each also belongs to .
-
such that each also belongs to .
-
such that each also belongs to .
-
such that each also belongs to .
Let be a space. All of the families and constitute a space with a primal set over .
Let be a space and is space. The mapping is called -semi-continuous (resp. -pre-continuous, - -continuous, - -continuous)if , for all is -open is -semi-open (resp. -pre-open, - -open, - -open).
Let be a space and . We find:
-
if and only if and .
-
If , then .
-
If , then .
Let be a space. We have:
-
.
-
.
-
.
Let be a space. Consider . If , hence is called -dense set.
2 Main results
This part is about demonstrating the possibility of determining new types of continuity on a space. First, let us make a supplement to the results from Al-Saadi and Al-Malki (2023) about a space characteristic.
Consider as a map that has the monotonic property, that is, if of , then . The whole set of monotonic maps on a set is denoted by .
Let , then the next is true:
-
is -open iff . Thus, is -open.
-
The countableunion of -open setsis -open; see Császár (2002). Hence, the set of all -open sets forms a and is denoted by . Consequentially, is a space, where is a primal set over .
By the above consideration, it is obvious that we can produce all space over for some .
Let be a space. Then, there exists satisfying the following properties:
-
and ,
-
.
Consider and . Hence, . So, and , hence we prove (i).
Moreover, from the definition , but from (i) implies . Therefore, and . □
Another method to obtain a space is by using the map , that is mentioned in Definition 2 (for deep details, see Császár, 2002).
If and satisfy the condition: if , there exists satisfying . Then, is a denoted by . Consequentially, is a space, where is a primal set over . Conversely, let be a , then such that , which means satisfies the condition: .
In the first case, consider and for the second case consider . For , where , considering as and as . Also, for , where , considering as and as .
Let be a space, , and . Then,
-
.
-
.
Note that . Moreover, as well as . However, when , we have and .
2.1 -continuous function
This part of our article is a discussion of three different types of generalized primal continuity. We depend on two types of spaces: those generated by a generalized neighbourhood system and monotonic maps.
Let and be two spaces. Consider as -open. Define a function . Then, is named -Continuous if and only if is -open.
The more general type of -continuity based on the concept of generalized neighbourhood systems as follows:
Consider and . Hence, is named -continuous iff for every and , there is satisfying .
Since if , then . The generalized primal neighbourhood system is defined as following:
Let be space, , be -open set, and . If , then . Therefore, .
The connection between -continuity and -continuity is described in the following.
Every -continuous function is -continuous, where produce by the neighbourhood system.
Consider as a function from to . Let , and . Thus, there is satisfies . Hence, such that . Therefore, and implies . □
There is a -continuous map produced by the neighbourhood system, which is not -continuous; the following example makes that clear.
Let be a space, where , , and . Suppose that is a space, where , , and . Consider and . Since if and , then and . If and , then and . If and , then and . Hence, . By the same way, we have . Let be the identity map. Thus, is a -continuous. However, is not -continuous since and implies if and and .
The extra condition that makes the inverse of Theorem 24 true is described in the following.
Every -continuous function is -continuous, whenever , where produced by the neighbourhood system.
Consider as a function from to . Put and . Thus, and . Hence, , then there exists satisfies and implies . □
The map in Definition 20 is a useful tool to define the -continuous in a different way as follows:
Consider , . Then, the next are equivalent:
-
is -continuous;
-
-
.
. Let . Thus . Because if that does not hold, then satisfies . We get, such that and . Hence, , which is a contradiction.
. Consider . Thus, from (ii), we get Therefore, .
. Consider . Put and . Thus, . From (iii) we get satisfies . Thus, . Hence, . □
2.2 - -continuous function
By using a generalized primal neighbourhood system that is mentioned in Definition 23, we can present a new kind of continuous function as follows:
Let and be two spaces. Let and . Hence is named - -Continuous if it is -Continuous.
In anther word if , , and , then satisfies , where restricted on and respectively.
Let and be two spaces , and . If and satisfy the next two conditions:
iff implies .
iff implies , then the next are equivalent:
-
is - -continuous;
-
-
.
2.3 Almost -continuity
This part is a discussion of the notion of “almost continuous” in the generalized field. Min (2009b) presented this notion between two generalized topological spaces. Here, we will give it with consideration for the primal set.
Let and be two spaces. Consider . Then, is named almost -continuous at if for every -open set , there existsa -open set satisfies . Moreover, is named almost -continuous if it is almost -continuous at every .
The more general concept between -continuity and almost -continuity is qualified in the following.
Every -continuous function is almost -continuous.
For let be a -open set such that . Since is -continuous, is -open set. Put . Thus . Now, . Hence, is almost -continuous at . Since is arbitrary, is almost -continuous. □
To say these two notions coincide, we need to discuss the technique that Császár presented in Császár (2008a). This technique changes the generalized topology of other generalized topologies, which is smaller than it. Here we will do the same, but this time with consideration of a primal set as follows:
Let be a space. Then, and are two spaces, given as follows for each :
(i) .
(ii) .
Note that the member of coincides with the union of all -regular open set. By another way the family of all - regular open sets is a based for the space .
So, the concept of almost -continuous coincides with the notion of -continuity if we make a suitable change to the space as follows:
is almost -continuous iff is -continuity.
Since is almost -continuous, then for every and for every -open set , there existsa -openset satisfies . Hence, from the definition of . By regularity of we have . Hence . Therefore, is -continuity. □
3 Strong -continuity
In this part, special types of -continuity will be introduced. In fact, the concepts of super -continuous functions and strongly - -continuous functions are given in Min and Kim (2011). Also, the notion of strong -continuous functions is presented by Kim and Min (2012). All these notions are described according to space features. Here, we will study these types of continuity in light of the primal set. First, let us define the set .
Let and be two spaces. Consider . Then, is named a strong -continuity if for every and -open set , there is a -open set satisfies .
Consider as strong -continuous function. If , then , for all -open set .
Assume is -open. Let . Let be -open such that . As is a strong -continuity, there existsa -openset and . Moreover, as and , . But . Hence, Thus, and . Hence, . □
Consider . If , then the next are identical:
-
is a strong -continuity;
-
For every and a -open set , there is a -open set satisfies
-
For every and a -closed set , there is a -open set and a -open set satisfies , and
-
For every and a -closed set , there is a -open set and a -open set satisfies , and .
. For , let be a -open set such that . So, there is a -open set satisfies . From Theorem 35, we get . Hence, .
. For , let be a -closed set such that . Since and is a -open set, there is a -open set satisfies . Put . Hence, is a -open set satisfies , and .
. It is clear.
. Let and be a -open set with . Hence, is a -closed set with . So, there is a -open set and -open set satisfy and . Hence, Therefore, is a strong -continuous. □
Consider . If is strong, then the next are identical:
-
is a strong -continuity;
-
For every and a -open set , there is a -open set satisfies
-
For every and a -closed set , there is a -open set and a -open set satisfies and
-
For every and a -closed set , there is a -open set and a -open set satisfies and . Hence, is satisfies , and .
Let and be two spaces. Then, is named strongly - -continuous, if for every and every -open set , there existsa -openset satisfies .
The next result studies the relationship between the notions of a strong -continuous function and a strongly - -continuous.
If is a strong -continuous and is strong, then is strongly - -continuous.
It automatically from Corollary 37. □
There is a strongly - -continuous function, which is not strong -continuous; the following example makes that clear.
Let be a space, where , , and . Suppose that is a space, where , , and . Define by Thus, is strongly - -continuous function.
However, it is not strong -continuous since .
Let and be two spaces. Then, is named super -continuous, if for every and every -open set , there existsa -open set satisfies .
The connection between the previous types of continuous functions and the -continuous function is qualified in the following.
Every strongly - -continuous function is super -continuous.
Let be strongly - -continuous. Then, for every and every -open set , there existsa -open set satisfies . But . Thus, . Therefore, is super -continuous. □
Every super -continuous function is -continuous.
Let be super -continuous. Then, for every and every -open set , there existsa -open set satisfies . Hence, . Since , . Thus, . Therefore, is -open. Hence, is -continuous. □
Let be a space, where , , and . Suppose that is a space, where , , and . Define by Thus, is -continuous function.
However, it is not super -continuous since .
3.1 Weakly -closed and -open functions
In this part, we introduce the notions of “weakly -closed function” and “ -regular space”. These two concepts are useful tools to show the converse of the relationship that we gave in Theorem 39. This result studies the connection between the notions of “strong -continuous function” and “strongly - -continuous”.
Let and be two spaces. Then, is named weakly -closed, if for every -closed set , we have .
If is a weakly -closed, then for each -open set , we have .
Since is -closed set, , and is a weakly -closed. Then, . □
If is a weakly -closed and strongly - -continuous, then is strong -continuous.
For , let be a -open : . Thus, there existsa -open : satisfies . By Proposition 46, we get Hence, by Theorem 36 (ii), is strong -continuous. □
Let be a space. Then, is called -regular on if for and a -closed set , there exist satisfies and .
Let be a space. Then, is -regular iff for and a -open set , there exists a -open set satisfies .
It is direct from Definition 48 and considering . □
If is a strongly - -continuous and is -regular, then is strong -continuous.
For , let be a -open set . Since is -regular, there is a -open set satisfies Since is a strongly - -continuous, there existsa -open satisfy . Hence, By using Theorem 36 (ii), is strong -continuous. □
Let and be two spaces. Consider . If is -regular and strong, then the next are identical:
-
is a strong -continuous;
-
is a strongly - -continuous;
-
is a -continuous.
. It is directly from Theorem 39.
. It comes directly from Theorems 42 and 43.
. It comes from the -regularity of the Theorem 36 (iv). □
Let and be two spaces. Consider . Then, is named -open function, if for all -open set in , we have is -open.
If is -open and strong -continuous with , then is -regular.
Suppose and is any -open such that . Put for . But is strong -continuous. Thus, there existsa -open set satisfies . Also, is -open, and hence is a -open such that . Therefore, Thus, by Proposition 49, we have is -regular. □
4 -connected and -hyperconnected spaces
This part is an application of the notions studied in previous sections. We will study the preservation of the notions of “ -connected” and “ -hyperconnected” by different types of generalized primal continuous functions.
Let be a space. Then, is named -connected space if there are no non-empty disjoint -open sets and satisfies .
Let be a space. Then, is named:
-
- -connected space if there are no non-empty disjoint - -open sets and satisfies .
-
- -connected space if there are no non-empty disjoint - -open sets and satisfies .
-
-semi-connected space if there are no non-empty disjoint -semi-open sets and satisfies .
-
-pre-connected space if there are no non-empty disjoint -pre-open sets and satisfies .
Let and be two spaces. Then, is named:
-
Contra -continuous if for every -open set , is -closed in .
-
Contra - -continuous if for every -open set , is - -closed in .
-
Contra -semi-continuous if for every -open set , is -semi-closed in .
-
Contra -pre-continuous if for every -open set , is -pre-closed in .
-
Contra - -continuous if for every -open set , is - -closed in .
Let be a contra - -continuous onto function. Consider as - -connected space. Then, is -connected space.
Consider as a contra - -continuous onto function. Let be - -connected space. Suppose that is not -connected space. Thus, there exist non-empty disjoint -open sets and satisfies . Therefore, we can say that are -closed sets. Hence, and are - -open since is contra - -continuous. But , and . Thus, is not - -connected space, which is a contradiction. Hence, is -connected space. □
Let be a contra - -continuous (resp. -semi-continuous, -pre-continuous) onto function. Consider as - -connected (resp. -semi-connected, -pre-connected) space. Then, is -connected space.
According to Theorem 13 and Corollary 14, we conclude that:
-
-open - -open -pre-open - -open.
-
- -open -semi-open - -open.
However, the relationship between the types of -connected spaces takes the following path:
Let be a space. Then, we have:
-
is - -connected -semi-connected - -connected -connected.
-
is - -connected -pre-connected - -connected.
(i) (1) - -connected -semi-connected: Let be - -connected, but not -semi-connected. Hence, there are non-empty disjoint -semi-open sets and in satisfies which implies that there are non-empty disjoint - -open sets and in satisfies . Hence, is not - -connected, which is contradiction. Therefore, is -semi-connected.
(2) -semi-connected - -connected: Let be -semi- connected, but not - -connected. Hence, there are non-empty disjoint - -open sets and in satisfies which implies that there are non-empty disjoint -semi-open sets and in satisfies . Hence, is not -semi-connected, which is contradiction. Therefore, is - -connected.
(3) - -connected -connected: Let be - -connected, but not -connected. Hence, there are non-empty disjoint -open sets and in satisfies which implies that there are non-empty disjoint - -open sets and in satisfies . Hence, is not - -connected, which is contradiction. Therefore, is -connected.
By using the same technique, we can show the implications in (ii). □
Let be space. Then, is named:
-
-hyperconnected if each -open set of is -dense.
-
- -hyperconnected if each - -open set of is -dense.
-
-semi-hyperconnected if each -semi-open set of is -dense.
-
-pre-hyperconnected if each -pre-open set of is -dense.
-
- -hyperconnected if each - -open set of is -dense.
Let be a space. Then, we have:
-
is - -hyperconnected -semi-hyperconnected - -hyperconnected -hyperconnected.
-
is - -hyperconnected -pre-hyperconnected - -hyperconnected.
(i) (1) - -hyperconnected -semi-hyperconnected: Let be - -hyperconnected, but not -semi-hyperconnected. Hence, there is non-empty -semi-open set in satisfies which implies that there is non-empty - -open set in satisfies . Hence, is not - -hyperconnected, which is contradiction. Therefore, is -semi-hyperconnected.
(2) -semi-hyperconnected - -hyperconnected: Let be -semi-hyperconnected, but not - -hyperconnected. Hence, there is non-empty - -open set in satisfies which implies that there is non-empty -semi-open set in satisfies . Hence, is not -semi-hyperconnected, which is contradiction. Therefore, is - -hyperconnected.
(3) - -hyperconnected -hyperconnected: Let be - -hyperconnected, but not -hyperconnected. Hence, there is non-empty -open set in satisfies which implies that there is non-empty - -open sets in satisfy . Hence, is not - -hyperconnected, which is contradiction. Therefore, is -hyperconnected.
By using the same technique, we can show the implications in (ii). □
5 Conclusion
Recently, Al-Saadi and Al-Malki (Al-Saadi and Al-Malki, 2023) presented a new generalized space. This space is characterized by all the nice features of spaces in the sense of primal sets. Some operators are defined in this space. Their behaviours are studied carefully.
In this article, we give attention to the notion of “continuity”. So, we defined some type of generalized primal continuous function. We can summarize the results as follows:
If and are generated by the neighbourhood system, then every -continuous function is -continuous; see Theorem 24. The opposite of this is not always true; see Example 25. However, when we consider , we can show that every -continuous function is -continuous; see Theorem 26. Moreover, by using a generalized primal neighbourhood system, , we conclude that every -continuous is - -continuous; see Theorems 27 and 29. Also, every -continuous function is almost -continuous; see Theorem 31. To make the opposite of this relation true, we use the technique of Császár, which changes the generalized topology of other generalized topologies, which is weaker than it. So, Proposition 33 shows that the two notions coincide. All these results are presented in Section 2.
Section 3 discusses the relationship between a strong -continuous function and several different types, as follows: Every strong -continuous function is strongly - -continuous when the space is strong; see Theorem 39. Example 40 shows that the converse is not true. Moreover, every strongly - -continuous is super -continuous, see Theorem 42 and every super -continuous is -continuous, see Theorem 43. Example 44 shows that the converse need not be true. To prove the converse of Theorem 39, we presented the notion of “weakly -closed function” or the notion of “ -regular”. So, Theorem 47 shows that every strongly - -continuous is strong -continuous if is a weakly -closed function, while Theorem 50 shows that every strongly - -continuous is strong -continuous if the space is -regular space.
To make it easier for the reader, we present these results in Fig. 1 as follows:
Finally, Corollary 51 shows that the notion of “strong
-continuous function” coincides with the notion “
-continuous” when the space
is both strong and
-regular.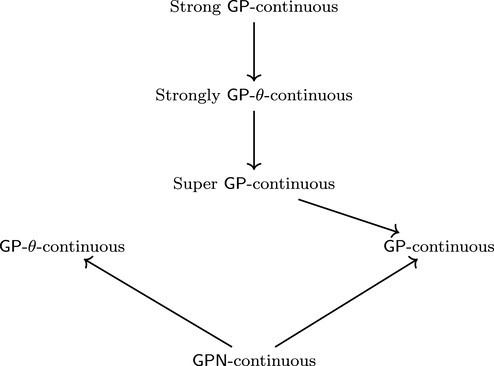
The relationship among several kinds of
-continuous function.
CRediT authorship contribution statement
Hanan Al-Saadi: Methodology, Writing – original draft, Writing – review & editing. Huda Al-Malki: Methodology, Writing – original draft, Writing – review & editing.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Categories of open sets in generalized primal topological spaces. Mathematics. 2024;12:207.
- [CrossRef] [Google Scholar]
- Generalized topology, generalized continuity. Acta Math. Hungar.. 2002;96:351--357.
- [CrossRef] [Google Scholar]
- Extremely disconnected generalized topologies. Ann. Univ. Sci. Budapest.. 2004;47:91-96.
- [Google Scholar]
- Separation axioms for generalized topologies. Acta Math. Hungar.. 2004;104:63--69.
- [CrossRef] [Google Scholar]
- Generalized open sets in generalized topologies. Acta Math. Hungar.. 2005;106:53-66.
- [CrossRef] [Google Scholar]
- - And -modifications of generalized topologies. Acta. Math. Hungar.. 2008;120:275-279.
- [CrossRef] [Google Scholar]
- On some new classes of sets and a new decomposition of continuity via grills. J. Adv. Math. Stud.. 2010;3:33-40.
- [Google Scholar]
- New topologies from old via ideals. Amer. Math. Monthly. 1990;97:295-310.
- [CrossRef] [Google Scholar]
- Contra continuity on generalized topological spaces. Acta Math. Hungar.. 2012;137:263-271.
- [CrossRef] [Google Scholar]
- -Continuity on generalized topological spaces. Commun. Korean Math. Soc.. 2012;27:809-813.
- [CrossRef] [Google Scholar]
- A note on -continuity in generalized topological spaces. Acta Math. Hungar.. 2009;125:387-393.
- [CrossRef] [Google Scholar]
- Almost continuity on generalized topological spaces. Acta Math. Hungar.. 2009;125:121-125.
- [Google Scholar]
- Some strong forms of -continuity on generalized topological spaces. Honam Math. J.. 2011;33
- [CrossRef] [Google Scholar]
- On a new operator based on grill and its associated topology. Arab J. Math. Sc.. 2008;14:21-32.
- [Google Scholar]




