

Translate this page into:
Solitary waves solutions of the MRLW equation using quintic B-splines
*Corresponding author at: Community College in Riyadh, King Saud University, Saudi Arabia kamal_raslan@yahoo.com (K.R. Raslan)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Abstract
In this paper, B-spline finite element method is used to solve the Modified Regularized Long Wave (MRLW) equation. The proposed approach involves a collocation method using quintic B-splines at the knot points as element shape. Time integration of the resulting system of ordinary differential equation is effected using the fourth order Runge–Kutta method, instead of the difference method. The resulting system of ordinary differential equations is integrated with respect to time. Three invariants of motion are evaluated to determine the conservation properties of the suggested scheme. The suggested numerical scheme leads to accurate and efficient results. Moreover, interaction two and three solitary waves are studied through computer simulation and the development of the Maxwellian initial condition into solitary waves is also shown.
Keywords
MRLW
B-splines
Solitons
Collocation method

1 Introduction
Solitary waves are wave packets or pulses, which propagate in nonlinear dispersive media. Due to dynamical balance between the nonlinear and dispersive effects these waves retain a stable waveform. The Regularized Long Wave (RLW) equation of the form:
2 The Governing equation and direct algebraic method (Gardner et al., 1997; Khalifa et al., 2007a,b; Hereman et al., 1986; Raslan, 2008)
Consider the MRLW equation of the form
3 Collocation method for solving MRLW equation
In this section, we apply the method with the function
as quintic B-splines. We consider the approximate solution to the solution
is given by
0
1
26
66
26
1
0
0
0
0
0
0
From these equations a system of first order ordinary differential equations can be obtained of the form:
4 Numerical tests and results
In this section we present some numerical tests of our scheme for the solution of MRLW equation for single solitary waves in addition to determining the solution of two and three solitary waves interaction at different time levels. Also to show the development of Maxwellian initial condition into solitary waves. The numerical solution must preserve the conservation laws during propagation.
4.1 Propagation of single solitary waves
To examine the validated and the efficiency of our scheme, we consider two cases in our numerical work, since
and
-error norm are used to compare our numerical solutions with the exact solution of Eq. (3). Also the quantities
are evaluated to measure the conservation properties of the collocation scheme, the analytical values of these invariants can be found as (Gardner et al., 1997):
. In the first case, we choose the parameters
. The conservation properties and the
-error norm and
-error norms. The analytical values for the invariants are
are illustrated in Table 2 below. Moreover, Table 3 represents the values of the invariants and error norms of the present method at time 10 against the results of Gardner et al. (1997) and Khalifa et al. (2007b).
T
I1
I2
I3
L2-error norm
L∞-error norm
0
4.442883
3.298731
1.415311
2.855687E−6
2.145767E−6
1
4.442883
3.298723
1.415301
2.257935E−5
1.645088E−5
2
4.442883
3.298712
1.415290
4.273932E−5
2.598763E−5
3
4.442885
3.298702
1.415280
6.246631E−5
3.492832E−5
4
4.442884
3.298692
1.415270
8.416529E−5
4.494190E−5
5
4.442884
3.298681
1.415260
1.078404E−4
5.537271E−5
6
4.442883
3.298672
1.415250
1.334255E−4
6.842613E−5
7
4.442883
3.298661
1.415240
1.620302E−4
8.213520E−5
8
4.442884
3.298652
1.415230
1.931854E−4
9.953976E−5
9
4.442882
3.298642
1.415219
2.265411E−4
1.171231E−4
10
4.442882
3.298630
1.415209
2.632212E−4
1.369715E−4
Method
I1
I2
I3
L2 × 103
L∞ × 103
Analytical
4.44288
3.29983
1.41421
0
0
Present
4.44288
3.29863
1.415209
0.26322
0.13697
Gardner et al. (1997)
4.442
3.299
1.413
19.39
9.24
Gardner et al. (1997)
4.440
3.296
1.411
20.3
11.2
Khalifa et al. (2007b)
4.44288
3.29983
1.41420
9.30196
5.43718
Also, Table 3 represents the values of the invariants and errors norms of the present method at time 10 against the recorded results of Gardner et al. (1997) and Khalifa et al. (2007b).
We find that our scheme provides good results than others. The motion of solitary wave using our scheme is plotted at time 10 in Fig. 1.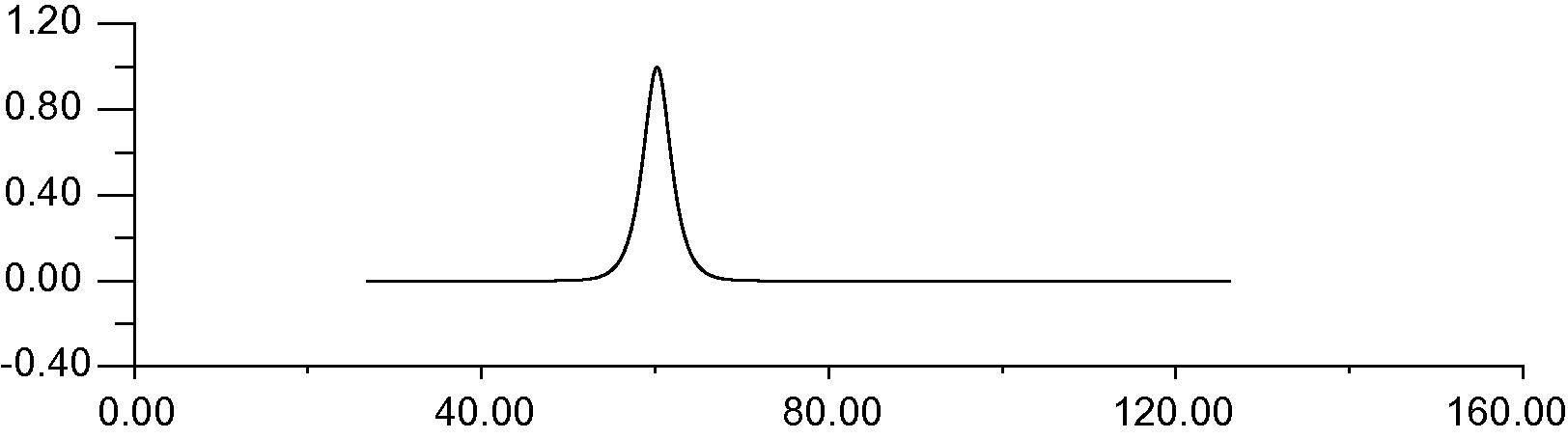
Single solitary wave with
, T = 10.
In the second case, we choose the parameters
then the amplitude is 0.54772. The analytical values of the invariants are
. The changes of the invariants from the initial variants approach to zero throughout and agree with the analytical values for the three invariants, which indicated that our scheme is satisfactorily conservative. Errors are satisfactorily small, since
at time 10. The results for the second case are shown in Table 4.
T
I1
I2
I3
L2-error norm
L∞-error norm
1
3.581964
1.344973
0.1538265
2.142769E−06
1.221895E−06
2
3.581966
1.344973
0.1538264
4.352044E−06
2.086163E−06
3
3.581964
1.344973
0.1538264
6.752275E−06
3.129244E−06
4
3.581965
1.344973
0.1538264
8.884196E−06
4.291534E−06
5
3.581964
1.344973
0.1538264
1.087434E−05
5.215406E−06
6
3.581965
1.344973
0.1538264
1.292003E−05
6.198883E−06
7
3.581964
1.344972
0.1538264
1.472382E−05
7.271767E−06
8
3.581964
1.344973
0.1538264
1.632736E−05
7.659197E−06
9
3.581960
1.344972
0.1538264
1.784318E−05
8.493662E−06
10
3.581958
1.344973
0.1538264
1.919314E−05
8.970499E−06
4.2 Interaction of two solitary waves
Interaction of two positive solitary waves is studied using the initial conditions given by the linear sum of two well-separated solitary waves of various amplitudes:
Time
I1
I2
I3
1
11.467700
14.617920
22.885030
2
11.467700
14.616560
22.879620
3
11.467700
14.615220
22.874220
4
11.467700
14.613870
22.868820
5
11.467770
14.612520
22.863410
6
11.467620
14.611190
22.858020
7
11.467270
14.609970
22.852570
8
11.466890
14.609760
22.846460
9
11.466490
14.613410
22.839010
10
11.466050
14.608160
22.842790
![(a) Interaction two solitary waves with c1 = 4, c2 = 1, x1 = 25, x2 = 55, [0, 250] at times T = 0. (b) Interaction two solitary waves with c1 = 4, c2 = 1, x1 = 25, x2=55, [0, 250] at times T = 14.](/content/185/2010/22/3/img/10.1016_j.jksus.2010.04.004-fig2.png)
(a) Interaction two solitary waves with c1 = 4, c2 = 1, x1 = 25, x2 = 55, [0, 250] at times T = 0. (b) Interaction two solitary waves with c1 = 4, c2 = 1, x1 = 25, x2=55, [0, 250] at times T = 14.
4.3 Interaction of three solitary waves
The interaction of three MRLW solitary waves having different amplitudes and traveling in the same direction is illustrated. We consider the MRLW equation with initial conditions given by the linear sum of three well-separated solitary waves of various amplitudes:
![c 1 = 4 , c 2 = 1 , c 3 = 0.25 , x 1 = 15 , x 2 = 45 , x 3 = 60 , [ 0 , 250 ] , T = 1. (b) c 1 = 4 , c 2 = 1 , c 3 = 0.25 , x 1 = 15 , x 2 = 45 , x 3 = 60 , [ 0 , 250 ] , T = 5. (c) c 1 = 4 , c 2 = 1 , c 3 = 0.25 , x 1 = 15 , x 2 = 45 , x 3 = 60 , [ 0 , 250 ] , T = 10.](/content/185/2010/22/3/img/10.1016_j.jksus.2010.04.004-fig3.png)
, T = 1. (b)
, T = 5. (c)
, T = 10.
Time
I1
I2
I3
1
14.980110
15.826100
23.012800
2
14.980090
15.824760
23.007380
3
14.980180
15.823430
23.001970
4
14.979930
15.822100
22.996530
5
14.979550
15.820770
22.991110
6
14.979140
15.819470
22.985690
7
14.978740
15.818400
22.980090
8
14.978040
15.818480
22.973750
9
14.974250
15.822740
22.965790
10
14.930390
15.822500
22.964190
4.4 The Maxwellian initial condition
The fourth numerical test of our scheme is concerned with the generation of a train of solitary waves from Maxwellian initial condition:
δ
Time
I1
I2
I3
1
2
1.772449
2.506352
−0.3668149
4
1.772446
2.506235
−0.3666974
6
1.772447
2.506171
−0.3666326
8
1.772446
2.506123
−0.3665860
10
1.772444
2.506092
−0.3665553
0.5
2
1.772451
1.879888
0. 2596494
4
1.772446
1.879855
0.2596828
6
1.772449
1.879841
0.2596973
8
1.772450
1.879834
0.2597050
10
1.772449
1.879828
0.2597092
0.1
2
1.772452
1.378607
0.7608777
4
1.772451
1.378577
0.7608364
6
1.772451
1.378546
0.7607937
8
1.772451
1.378515
0.7607529
10
1.772453
1.378483
0.7607117
0.04
2
1.772453
1.302368
0.8343938
4
1.772453
1.300995
0.8320332
6
1.772453
1.299635
0.8296967
8
1.772451
1.298285
0.8273833
10
1.772440
1.296948
0.8250930
By decreasing the value of
, more solitary waves are obtained. When
, a single solitary wave is generated for our scheme, when
a train of two stable solitary waves is generated, and so on. The total number of solitary waves generated for various values of
are in agreement with the results found in Gardner et al. (1997) and Khalifa et al. (2007b) (Fig. 4).![Maxwellian initial condition, Δ x = 0.1 , Δ t = 0.1 , [ 0 , 100 ] , δ = 1 . (b) Maxwellian initial condition, Δ x = 0.1 , Δ t = 0.1 , [ 0 , 100 ] , δ = 0.1 . (c) Maxwellian initial condition, Δ x = 0.1 , Δ t = 0.1 , [ 0 , 100 ] , δ = 0.04 .](/content/185/2010/22/3/img/10.1016_j.jksus.2010.04.004-fig4.png)
Maxwellian initial condition,
. (b) Maxwellian initial condition,
. (c) Maxwellian initial condition,
.
5 Conclusion
A numerical method based on collocation method using quintic B-spline finite elements within the collocation method leads to a system of first order differential equations is solved by fourth order Runge–Kutta method, which shows good conservation. The efficiency of the method is tested on the problems of propagation of single solitary wave, interaction of two and three solitary waves and development of train of solitary waves from Maxwellian initial condition. The three invariants of motion are constant in all the computer simulations described here. The problems presented in this paper suggest that the methods should be considered as one of possible ways of solving these kinds of nonlinear partial differential equations.
References
- Galerkin methods applied to some model equations for nonlinear dispersive waves. J. Comput. Phys.. 1979;30:428-451.
- [Google Scholar]
- Least squares quadratic B-splines finite element method for the regularized long wave equation. Comput. Methods Appl. Mech. Eng.. 2000;182:205-215.
- [Google Scholar]
- Application of cubic B-splines for numerical solution of the RLW equation. Appl. Math. Comput.. 2004;195:373-389.
- [Google Scholar]
- The use of adomian decomposition method for solving the regularized long-wave equation. Chaos Soliton Fract.. 2005;26(3):747-757.
- [Google Scholar]
- Solitary wave of the regularized long wave equation. J. Comput. Phys.. 1990;91:441-459.
- [Google Scholar]
- A B-spline finite element method for the regularized long wave equation. Commun. Numer. Methods Eng.. 1995;11:59-68.
- [Google Scholar]
- A least squares finite element scheme for the RLW equation. Commun. Numer. Methods Eng.. 1996;12:795-804.
- [Google Scholar]
- Approximations of solitary waves of the MRLW equation by B-spline finite element. Arab. J. Sci. Eng.. 1997;22:183-193.
- [Google Scholar]
- Exact solitary wave solutions of non-linear evolution and wave equations using a direct algebraic method. J. Phys. A. 1986;19:607-628.
- [Google Scholar]
- An application of the decomposition method for the generalized KdV and RLW equations. Chaos Soliton Fract.. 2003;17:869-877.
- [Google Scholar]
- Khalifa, A.K., 1979. Theory and Applications of the Collocation Method with Splines for Ordinary and Partial Differential Equations, Ph.D. Thesis, Heriot-Watt University, 1979.
- A finite difference scheme for the MRLW and solitary wave interactions. Appl. Math. Comput.. 2007;189:346-354.
- [Google Scholar]
- A collocation method with cubic B-splines for solving the MRLW equation. Comput. Appl. Math.. 2007;212:406-418.
- [Google Scholar]
- He’s variational iteration method for the modified equal width equation. Chaos Soliton Fract.. 2008;39(5):2102-2109.
- [Google Scholar]
- Calculations of the development of an undular bore. J. Fluid Mech.. 1966;25(2):321.
- [Google Scholar]
- A numerical solution of the Burgers’ equation using septic B-splines. Chaos Soliton Fract.. 2005;26(3):795-804.
- [Google Scholar]
- Solitary waves of the EW and RLW equations. Chaos Soliton Fract.. 2007;34(5):1498-1518.
- [Google Scholar]
- Solitary wave interactions of the GRLW equation. Chaos Soliton Fract.. 2007;33(2):479-491.
- [Google Scholar]
- A computational method for the regularized long wave (RLW) equation. Appl. Math. Comput.. 2005;167:1101-1118.
- [Google Scholar]
- Exact solitary wave solutions of equal width wave and related equations using a direct algebraic method. Int. J. Nonlinear Sci., UK. 2008;6:246-254.
- [Google Scholar]
- Shivamoggi, Bhimsen K., Rollins, David K., 2002. Evolution of solitary-wave solution of the perturbed regularized long-wave equation. Chaos Soliton Fract. 13 (5), 1129–1136.
- Exact travelling wave solutions of nonlinear partial differential equations. Chaos Soliton Fract.. 2007;32(2):808-815.
- [Google Scholar]
- Collocation solution for RLW equation with septic splines. Appl. Math. Comput.. 2005;161:623-636.
- [Google Scholar]
- Collocation method using quadratic B-spline for the RLW equation. Int. J. Comput. Math.. 2001;78:399-412.
- [Google Scholar]
- A finite difference scheme for generalized long wave equation. Appl. Math.. 2005;168(2):962-972.
- [Google Scholar]




