

Translate this page into:
Research on online fault detection tool of substation equipment based on artificial intelligence
⁎Corresponding author. zhengxin12021@163.com (Zheng Xin)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
While the use of supervised learning algorithms for fault detection and classification is well-studied in Artificial Intelligence, the use of unsupervised learning for fault detection receives less attention. Additionally, work on substation fault detection has emphasized the use of unsupervised learning in conjunction with neural network modeling to detect and diagnose unknown fault states. It is accomplished by combining two techniques: 1) an incremental one-class method for detecting anomalies and 2) a dynamic shallow neural network for the fault state. Moreover, the proposed work was used to data samples to detect faults, and the results were much superior to those obtained in prior research. Additionally, experimental research is performed on online process-based substation equipment to determine the validity of the technique. The findings indicate that the suggested framework is an effective tool for detecting and categorizing known and unknown process problems.
Keywords
Artificial Intelligence
Anomalies
Unsupervised learning
Supervised learning
Substation equipment

1 Introduction
Several research on strategies for detecting, categorizing, and recognizing transmission line and distribution system defects have been conducted throughout the years. It's difficult to exaggerate the importance of building an intelligent fault monitoring and diagnostic system capable of detecting and locating a wide range of defects, especially as smart grid concepts cause researchers to become increasingly worried. Several businesses have made advances in the detection, categorization, and placement of faults in power systems during the previous two decades (Eltawil and Zhao, 2010). Signal processing techniques, artificial intelligence, and machine learning, as well as developments in GPS and communications, have allowed an increasing number of researchers to perform studies with a broad and deep scope, pushing the bounds of traditional fault protection systems. Also being fixed are two key shortcomings in online fault diagnosis systems.
The computerized Energy Management System (EMS) and Supervisory Regulate And Data Capture (SCADA) systems are used to monitor and control power stations in a contemporary power grid. When a fault happens in an automatic station, the defective equipment is separated by the functioning of appropriate relays or breakers; in the meanwhile, the Scam system sends alarm signals to the driver's console on time. The operator inside the control center is in charge of recovering the faulty system, and they must first utilize their judgment and expertise to determine the likely faulty components. The backup safety removes the fault whenever a break or its related relays fail to operate. The interruption area is expanded in these kinds of instances. It is hard for the user to determine the source of the malfunction in a crisis if there is no automated diagnostic help feature. Furthermore, several failures may occur, resulting in many breakers getting triggered at the same time. In these conditions, there are so many alert signals flooding their operator's dashboards it's impossible for them all to properly evaluate that issue and take the appropriate steps. As a result, various approaches for delivering speedy and reliable fault analysis to aid an operator in the conditions mentioned must be developed. Artificial Neural Networks (ANN) have been shown in various related publications to be a viable answer to these challenges in recent years. By identifying various combinations of breakers and relay states, the fault diagnostic issue is phrased as a pattern recognition problem. Basic ANN abilities have been shown in online fault diagnostic situations. However, other issues, such as sluggish resolution in the training phase and determining network parameters such as hidden units, layers, integral gain, and velocity value, remain unresolved in practice.
The first limitation is the difficulties that come with data collection. In addition, intelligent electronic devices (IEDs) are being utilized to gather data at a large number of nodes in grids (Wang and Shi, 2018). Sensors that are non-intrusive and self-powered are for online smart grid monitoring (Rodriguez et al., 2020). When more data become available, researchers may construct intelligent issue detection systems by extracting information from data connected to a variety of situations (Lei et al., 2016). The influence of complicated and varied network topologies may be mitigated by using a large number of interleaved sensors to gather current and voltage information (Chen et al., 2016). The second stumbling block is a lack of communication and computation skills. IEDs in power grids may benefit, according to researchers (Kezunovic, 2011). Sensor-based online monitoring systems will be able to respond promptly and correctly to malfunctioning circumstances as a result of these technological advancements. The processing power of computers has also improved tremendously. High-performance computing technologies can execute tasks in a fraction of the time required by traditional computing systems, allowing more complicated approaches to be implemented (Pell et al., 2013). Fig. 1 depicts the AI-Fault Detection tool.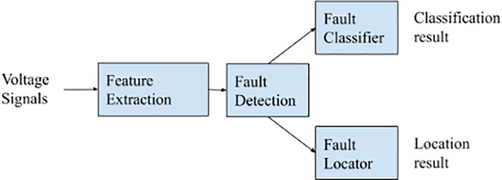
AI-Fault Detection tool.
Modern power systems employ computerized energy management systems (EMS) and supervisory management and data acquisition (SCADA) systems to monitor and control substations (Thomas et al., 2004). EMS utilizes a set of tools and techniques that enhance the analysis process by diagnosing the fault. It is thus able to communicate to the controller of the main source for transferring the information regarding system data. This particular system has to provide information regarding the control procedures to the workstation where the fault classification is required. When a problem occurs in an automated substation, the affected equipment is isolated using appropriate relays and circuit breakers, while the SCADA system transmits timely alarm signals to the operator consoles. Operators at control centres are in charge of fixing system faults, and their first responsibility is to utilize their experience and judgment to identify any malfunctioning components (Karlsson, 2004). The backup protection system automatically corrects the situation when a circuit breaker or one of its connected relays fails. In other circumstances, the outage area is expanded. The operator is unable to detect the reason for a malfunction during an emergency without the aid of an automatic diagnosis tool. Furthermore, several faults may occur at the same time, causing many breakers to trip. Alarm notifications flood the operators' consoles in these cases, making it difficult for them to analyze the problem and take proper action. As a result, to aid operators in the aforementioned conditions, tools for conducting speedy and precise fault investigations are necessary.
2 Related work
Over the last decade, a lot of effort has gone into developing computer technologies for issue diagnostics. They used the Expert System (ES) extensively in the majority of scenarios (Hawley et al., 1990). While the ES-based method to defect identification has its benefits, it also has its drawbacks (Huang and Sun, 2013). Getting information and updating or maintaining a knowledge base, for example, takes time. Furthermore, in a real-time environment, the ES reaction time is rarely appropriate due to the standard knowledge representation and inference method. In recent years, several publications have demonstrated that Artificial Neural Networks (ANN) may be a viable solution to these issues. The fault diagnosis problem is described as a pattern recognition challenge since it involves detecting various combinations of breakers and relay statuses. In situations requiring online fault diagnostics, ANNs have been demonstrated to exhibit essential skills (Messai et al., 2015). However, some practical challenges remain unsolved, including sluggish convergence during the training process and selecting network properties such as hidden units, layers, learning rate, and momentum value. Furthermore, the ANN method is opaque since we don't know how the findings are generated or how the output is used to make a diagnosis (Dib, 2021). In addition, the neural network that controls the system must be retrained every time the system's configuration is modified. Users typically resist using the ANN technique to defect finding in practice due to the large number of patterns required to train the ANN and the long training procedure.
Parallel processing can help diagnose issues more quickly (Peng and Reggia, 1990). In the context of diagnosing both many and single failures, the approach for encoding and inferring cause-effect network information (Chin, 2002) was presented. However, it does have the following drawbacks:
-
A fixed cause-and-effect network cannot distinguish between different types of failures.
-
Determining whether a relay was engaged successfully or erroneously is difficult to handle without some set of rules in the cause enhanced system.
Because of developments in signal processing techniques, researchers have been able to take a more comprehensive and focused approach in studies using classic fault avoidance approaches (Raza et al., 2020). In addition, the image addresses two well-known flaws in online defect detection systems. The difficulty in acquiring appropriate data is the first limitation. Intelligent electronic devices (IED) are utilized to collect data at various grid nodes/buses. Sensor networks for intelligent online monitoring may also be built (Lu and Gungor, 2009).
Using knowledge gathered from data related to a range of transmission grid circumstances, researchers were able to incorporate an intelligent based fault projection model (Mellit and Kalogirou, 2021). Different and sophisticated topologies based on the transmission model are mitigated by involving various sensors and electric signals. The lack of processing and communication capability is the second constraint. The use of synchronized global positioning system (GPS) sampling and high-speed broadband communications in IEDs in power grids have been proposed (Ge, et al., 2002). These technological improvements guarantee that online monitoring systems based on sensor networks react promptly and correctly to erroneous events. Higher-complexity approaches may now be employed because of the availability of high-performance computer systems (Tang et al., 2008).
Current transmission line protection technologies include distance protection, differential protection, and directional comparison (Bolandi et al., 2015). When a high rate of fault clearance is required, directed comparison relays are employed. If an issue happens within the protection zone, they are trained to react instantly. Several analytical approaches for directed comparison have been developed and successfully tested since the introduction of microprocessors. Regrettably, these methods are incapable of dynamically adapting to changing source impedance or other system operational conditions. Furthermore, to establish the direction of the flaw, these systems rely on digital signal processing, which takes time (ty-pically-one cycle of the system frequency). If the signals are audible, they are more likely to make mistakes. An approach that is quick, precise, and dependable, as well as flexible to changing system conditions, would be ideal.
ANNs are a suitable option since they can handle the vast majority of cases when a deterministic solution is unavailable (Jain and Srinivasulu, 2004). The inherent benefits of ANNs, such as improved noise immunity, resilience, fault tolerance, and generalization capabilities, will be used in this method. As a result, source impedance variations and the presence of fault resistance have no bearing on an ANN-based discriminator's conclusions. Induction motors are essential because of their long life, low cost, and efficiency. As a result, utilizing a motor with a little fault inadvertently might lead to catastrophic failures and a sudden stop. Early identification of induction motor defects has become critical to saving money by averting an emergency shutdown of a manufacturing line (Nakamura and Mizuno, 2022). Unexpected failures can be prevented by recognizing flaws early on. Several research is being conducted to establish the most effective way of detecting bearing problems. The most widely used detection tool has several drawbacks, including the higher cost of sensors used for vibration and includes the time necessary for installation. The existence of bearing defects is determined using diagnostic approaches based on acoustic emission. A driving-based methodology is utilized for identifying the faults, as well a multi-layer fiber-based sensor for conditional monitoring, is also available.
MCSA (motor current signature analysis) is a common diagnostic tool (Azamfaret al., 2020). MCS has several benefits. Online analysis is possible, allowing a wide range of defects to be discovered. MCSA provides some benefits, including cost savings and simplicity of installation, but it also has several disadvantages. Because the amount of stator current at bearing fault signature frequencies changes with load and rotation speed, determining the stator current threshold values necessary to activate the fault alarm in a certain operating condition can be difficult. An increase in load current, according, might lead to fault misdetection. Thorough and systematic testing is required when a bearing is healthy, and this healthy data must be acquired and characterized under a range of load scenarios.
Researchers previously reported on an SVM-based diagnostic technique based on the frequency model of the current attained at different rotational speeds to solve this issue (Widodo et al., 2009). The fault diagnosis was documented under light load situations. Tests and diagnostics are required when running motors at a location with a high load and a continually changing rotational speed. The author proposed using time-domain current signals to detect bearing defects. Data was collected at no load and at rated load to evaluate the recommended approach. A model-based technique is used to determine the degree of bearing failure when the motor is running at any speed (Zhang et al., 2020).
Deep learning-based approaches, on average, take far longer to train than machine learning-based methods. Since the turn of the century, ANNs have sparked academic curiosity for a variety of reasons, including their ability to self-learn and their proclivity for finding the best answers. By utilizing an intelligent system to adaptively construct indication thresholds, artificial settings may be successfully reduced. Sparse coding of current time-domain inputs was used to train the fully connected neural network for discrimination. The spectrum characteristics of current data were obtained, and the values of the spectrum energy were then input for training (Ngaopitakkul and Bunjongjit, 2013, Song et al., 2020, Esmaelpooret al., 2020). The weights of the SOM neural network were optimized using particle swarm optimization after being supplied in-class density in current frequency domain data. The current signal is then trained, according to reference (Mody and Bhoosreddy, 1995, Ahmed and Ali, 2020, Shahabaz and Afzal 2021).
The current signal's Fourier coefficient and small wave characteristic were employed as the input to a deep neural network in reference (Li, 2022, Prathik et al., 2019, Prathik et al., 2016). By merging an artificial neural network with time–frequency indicators for arc fault identification, several systems enhanced arc fault detection accuracy to varying degrees. The majority, on the other hand, evolved elaborate structures with several buried layers, resulting in a massive number of neurons and relatively complicated movements. As the range of load types grows, the limitations of such systems become increasingly evident.
3 Materials methods
3.1 a) One class neural network
This type of framework is similar to a support vector machine that differentiates all the available data points from the point of origin. This is utilized to enhance and exploit parameters gathered from the unsupervised-based model which belongs to anomaly identification. In this framework, the proposed methodology is not included for training with the forecast outcome. As like in the supervised model, this framework is used to test and train by utilizing process data. This type of neural network estimates the sample data based on decision score to distinguish anomalies in the set of composite data where the conclusion limit amongst anomalies and normal are nonlinear. Chalapathy et al. (2018)incorporated a neural framework that is utilized to find the anomalies. The framework is depicted in Fig. 2 below.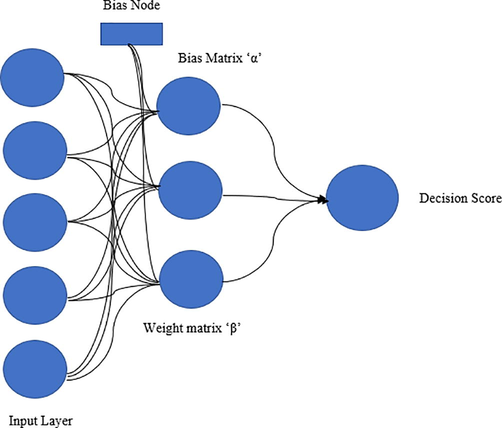
One Class Neural Framework.
Fig. 2 depicts the neural network, where the scalar matrix represents the process from the hidden layer to the final layer, ‘β’ illustrates the weighted model from the initial layer to the next layer, D depicts space, ‘α’ represents matrix bias, h is the neural network purpose used for activation, and M depicts the number of data samples that originates from the source.
The utilized neural framework is illustrated using the below formula as,
From equation (1), the bias '
’,
illustrates the weight matrix, and the outcome matrix is illustrated by ‘
that can be utilized for the optimization approach. The optimization approach for a particular neural class model by enhancing ‘γ’and ‘β’ individually while upgrading the ‘α' based on optimization.
Similarly, the enhancement for α,
Based on the framework proposed in [40], in one neural model, the initial layer feeds the group of multivariate instances and estimates the sample data value based on the outcome for a particular sample of data. From equation (2) the optimization of ‘γ’ and ‘α’ utilizing the value of ‘β’. Particularly, equation (3) depicts the enhancement of by utilizing the enhanced value of ‘γ’ and ‘β’. The initial score of decision is regulated to estimate for every sample of data based on optimized scores of ‘γ’, 'β’, and 'α’. By utilizing the score of decision, abnormal and normal samples are categorized. Finally, based on the optimized framework, a positive score of the decision data is utilized as a normal parameter, and a non-positive value will be classified as an abnormal situation.
3.2 b) classification of fault
In this model, the narrow neural network is utilized to classify the states of fault based on the supervised learning model. It's an approach to forming AI, which trains the computer framework on the outcome sample that has been characterized by a certain type of output. This proposed neural-based model outputs continuous changes based on unidentified fault detection. Consequently, the enhanced framework learns and evaluates the identified faults by utilizing the proposed algorithm 1. Used, for instance, if an abnormal fault is identified by using a class-based enhanced neural network model, the narrow neural network outcome is amplified using 1. Identify indefinite faults are mentioned as a unique fault ailment and are enhanced by a neural network. Fig. 3 depicts the proposed framework for arrangement. If a fault arises, detected fault situations are identified based on the trained framework.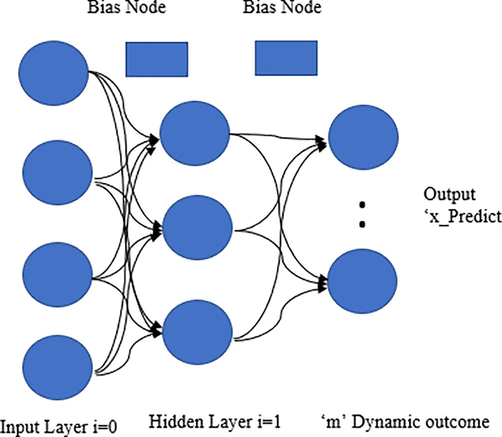
Dynamic neural network.
The objectives of the neural network are projected as given below,
3.3 c) Fault detection methodology
This portion of the work illustrates the entire methodology of the proposed framework. Neural network anomaly identification is utilized in this proposed work for identifying the anomalies. The neural network is enhanced as an incremental framework to identify the abnormal faults from the present faults and abnormal faulty situations. To separate the gathered faults, a modified neural network is utilized and enhanced based on a narrow network. The framework of the proposed online process fault detection model is illustrated in Fig. 4. The narrow and the one-class-based neural network model are trained by utilizing the nonfaulty data. Data that is based on time are framed by forwarding the 'm' sample window and anomaly testing. Data that is based on time are framed by forwarding the 'm' sample window and anomaly testing. In the frame where test data are included, all samples are gathered and the total number of data is associated with a predetermined marginal phase.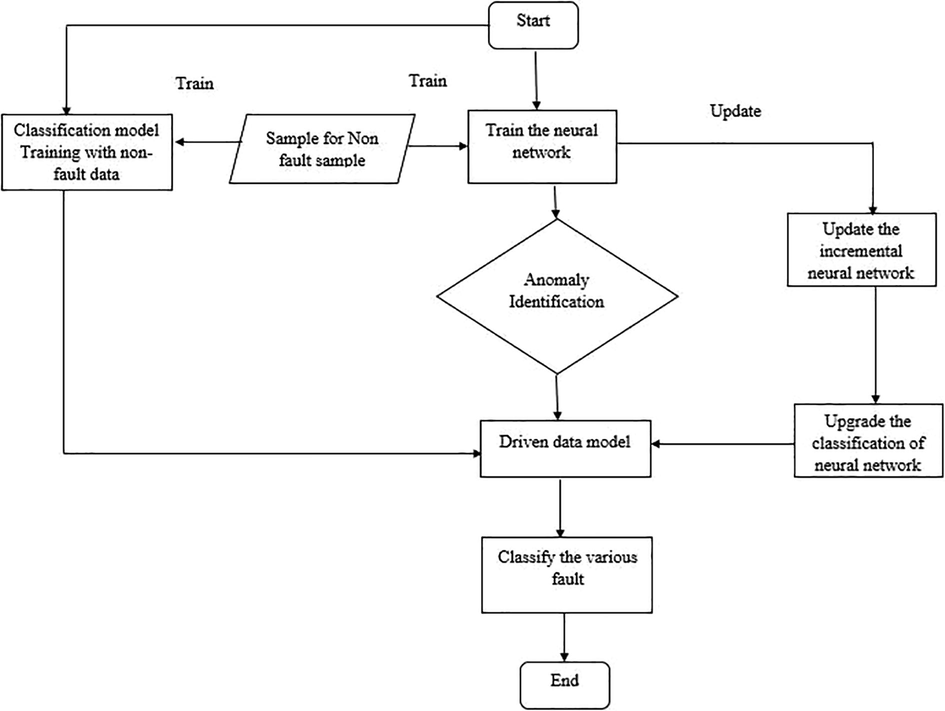
Substation equipment fault detection framework.
From the outcome of the results, the marginal phase deviates from the level of noise in the sampling data gathered from the process. If testing and training data include 5 % of noise variation, the probable outcome is gathered when anomalies are included in more than 20 % as the bordering phase. Moreover, with 10 % of the noise phase in testing and training data, more than 30 % of anomalies give the expected outcome within the data frame of the process.
In the enhanced class of neural networks, if a total number of anomaly identification points exists well below the marginal phase, the data samples are mentioned as having a normal fault situation. Hence, the frame which includes the data directs into the narrow neural network to identify the fault condition. This process of neural network classification structure is illustrated in Fig. 3. The network is initially framed utilizing the structures of data as the initial layer that consists of 70 hidden phases and a unique outcome layer to identify the normal samples. Though, the framework studies the variations that are happening based on the total faults identified. The enhanced one-class neural methodology is illustrated in algorithm 1. The total iterations were based on a trial-and-error approach. From the analysis 1000 to 1500, iterations gave a reasonable score; this differs based on various types of data. Narrow neural network components values are enhanced utilizing stochastic gradient descent and backpropagation. Algorithm 2 illustrates the dynamic outcome of the neural network. The total number of enhanced epochs was determined based on a trial-and-error approach. Iteration between 400 and 800 provided enhanced outcomes from the analysis. Though this estimate is suitable to identify the samples, it may deviate from samples and structures.
Algorithm 1. Enhanced one class network.
Step 1: Input: the sample which is a non-fault, 'm' dependent data based on window time.
Step 2: Output: a group of result values (for one sample)/update neural network.
Step 3: While (m window).
Step 4: mention the value of ‘α’.
Step 5: for the number of iterations.
Step 6: increment the value of ‘β’ and ‘γ’ to enhance the neural network and the end layer.
Step 7: enhance the value of r using the incremental value of ‘β’ and ‘γ’.
Step 8: end.
Step 9:estimate the decision value for every sample: d(m).
Step 10: if decision value (d(m) ≥ 0) then.
Step 11: non faulty data points.
Step 12: else.
Step 13: Anomaly_total = Anomaly_total + 1.
Step 14: iterate step 3 to step 13f
window data samples.
Step 15: if Anomaly_total > level of marginal data.
Step 16: identify the fault in the 'm' window utilizing 3–13.
Step 17: if anomaly_total > level of marginal data.
Step 18: enhance the incremental neural model.
Step 19: update the dynamic outcome of the neural layer.
Step 20: else.
Step 21: describe the fault which is unknown as a false alarm.
Step 22: else.
Step 23: increment to Dynamic network for identification of a fault.
If the enhanced neural network identifies the unique faults, the narrow classification neural network will increment the layer of output and the model is trained along with the identified fault as illustrated in algorithm 2. Approaching the model by sliding the ‘m’ number of the window in the sample frame is used to find the abnormal fault.
Algorithm 2. Dynamic neural network
Step 1: Input: Non-faulty sample or 'm' window data.
Step 2: Output: Dynamic outcome of neural network.
Step 3: Adjust the
.
Step 4: Describe the initial layer and output layer.
Step 5: increment the output layer (based on a neural network).
Step 6: for (total number of iterations).
Step 7: Enhance
.
Step 8: end.
Step 9: return {Dynamic network}.
4 Conclusion
This paper incorporates the framework based on artificial neural network methodology for fault identification and analysis. This proposed framework is utilized to increment by own based on identifying unidentified faults and keeps on enhancing itself when an abnormal fault identification. In a real time frame, lower test group intervals and a high-efficiency estimator will provide an effective outcome regarding the identification time. In this proposed model, we utilized 300 trial windows and obtained an accuracy time of 70 sec for every 200 samples. The framework is efficient to put up various sampling time-dependent data. The proposed model investigates the various number and types of faulty without prior knowledge. Experimental analysis and simulated samples are utilized to assess the proposed method. The results depict the efficiency of the algorithm in identifying fault recognition. This particular methodology is significant for data with limited information on fault. Future work can be focused on diagnosing the identified faults in the substation equipment by using real-time process data. This could enhance the accuracy of fault identification and make the workstation fault free for carrying out a strategy to carry out the tedious task in the process application.
5 Discussion
K-nearest neighbor (KNN) is a distance-based algorithm, therefore study calculated between such a new view and an old point is expensive, degrading its speed. In greater space, calculating a range is costly and academic performance. KNN is robust to outliers or missing values, thus we must imputation incomplete data and remove outliers before applying it. Internet of things (IoT) Interconnected systems interact through networks. As a result, without any security precautions, the system offers little control and may lead to a variety of networking assaults. Even without the user's direct involvement, the IoT system provides essential personal information in complete detail. Neural Recurrent Network In medical economic management, there are concerns with gradients increasing and receding. It's tough to train an RNN, and it can't take very long cycles when Tanh or Relu is used as an activation element. LSTMs gained popularity since they solved disappearing gradients. It doesn't eradicate it. One challenge is that data must be evaluated in each cell. Adding forget gates has made it cell more complicated. Training and cases involve needing a lot of time and resources. Due to cubic layers for each cell, they demand large memory throughput, which even the system normally lacks. LSTMs are inefficient hardware-wise. Developers want a model that can recall previous knowledge longer beyond LSTMs. Humans divide knowledge into little chunks for ease of recall, which inspired this concept. So we proposed the ANN methodology for fault identification and analysis.
6 Result
6.1 Experimental analysis of the proposed framework
The proposed framework is utilized to test the substation equipment. RT580 fault analysis identifies system phase and rate of flow which is cascading the outcome that has been done to gather non-fault and normal samples. The information of the analysis setup is illustrated in the RT580 analysis physically. In this analysis procedure, the chamber phase and the outcome of the tank are utilized to predict the condition of fault. The experimental sample between 600 and 1000 are utilized to find fault 1 and fault 2 was identified in the sample between 1200 and 1600.
If several different samples are higher than the average phase, the enhanced neural network and the framework would be upgraded based on newly identified faulty samples. In this analysis, two data-based frames are utilized to authorize the abnormal fault situation before enhancing the neural model. Moreover, 300 samples were utilized in the proposed model for testing. Table 1 illustrates the data utilized for training purposes.
Incremental Framework
Data frame used for algorithm 2
Primary
300 normal data
Framework 1
Primary + 300
Framework 2
Framework 1 + 300
Fig. 5 illustrates the overlapping of the faulty and healthy samples where the amplitude of the substation equipment varies from 70 to 30 scale. The health sample are illustrating the model condition in the higher amplitude and the fault conditions happening in the lower amplitude. Due to the overlapping of the healthy and faulty situations in the proposed framework. Both the framework is utilized in the incremental access of the proposed model.Fig. 6.Fig. 7..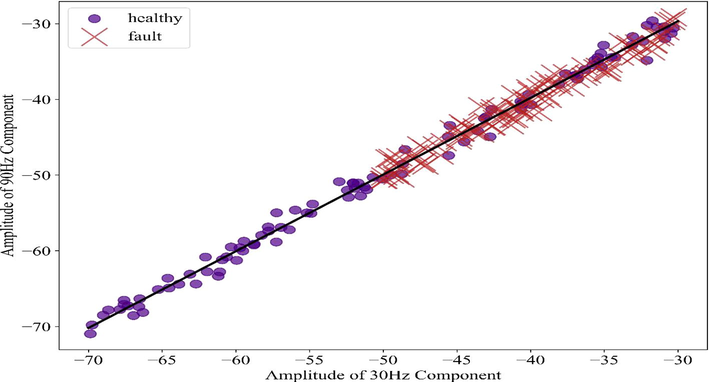
Overlapping of the fault and healthy samples.
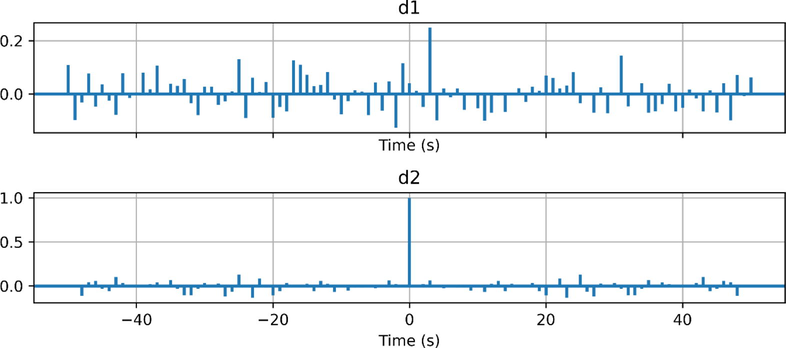
Wavelet disintegration comparison of d1 and d2 layer substation equipment.
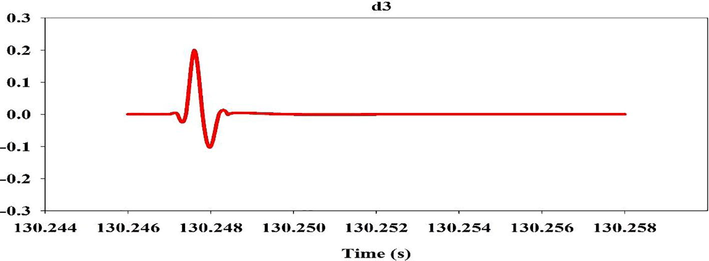
Wavelet disintegration comparison of d3 layer substation equipment.
The time-based amplitude indicates the various loads in the sample training and is used to test the network for training purposes. The 600 samples are utilized to experiment with the samples based on the suggested fault identification approach.
Creating the four layers of comprehensive information on wavelet decomposition, the proposed model includes the energy based on the layers opted as the indicator frequency. Depending upon the four layers, the wavelet energies of the signals are indicated as given below in equation (5).
η is the approximate energy, is the total layer m of the detailed signal, and m is the total of sampling points in a single cycle of frequency.
The proposed framework significantly identifies the samples within the enclosed window sample. In this model, we separate the data samples into different samples and process them into the neural model. Moreover, the neural model response will be more significant than the commonly utilized neural framework. For instance, considering the substation equipment, a larger time interval for the process industry, a smaller time interval can be utilized to input the approach in real-time to differentiate the abnormal and normal parameters to identify the fault. Furthermore, building this proposed framework to identify the faulty components for the parameter diversion could be significant to build a procedure for fault identification and analysis using an artificial intelligence approach.
6.2 Detection rate
The availability to track any source of data, including user logs, gadgets, networks, and computers, is among the advantages of detection. Fig. 8 depicts the comparison of detection rates for existing and proposed work.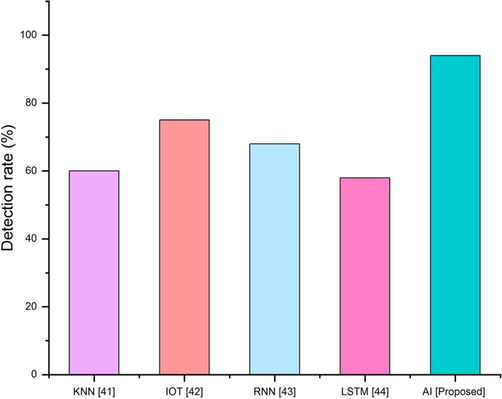
Comparison of detection rate for existing and proposed work.
When compared to the existing work [K-nearest neighbor (KNN), Internet of Things (IoT), Recurrent neural network (RNN), and Long short-term memory (LSTM) ]the proposed method have a greater detection rate.
Acknowledgement
The authors are thankful to the higher authorities for the facilities provided. This paper is supported by the Science and Technology Project of State Grid Jiangsu Electric Power Co., LTD., Item no.J2021155.
Authors’ contribution
This study was done by the authors named in this article, and the authors accept all liabilities resulting from claims which relate to this article and its contents.
Conflicts of interest
There are no conflicts of interest.
Funding
No funding was received for this study.
Availability of data and materials
The data used to support the findings of this study are available from the corresponding author upon request.
Statements and declarations
The author declares that no conflict of interest is associated with this study.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renewable Sustain. Energy Rev.. 2010;14(1):112-129.
- [CrossRef] [Google Scholar]
- Cyber-attacks related to intelligent electronic devices and their countermeasures: A review. In: 2018 53rd International Universities Power Engineering Conference (UPEC). 2018.
- [CrossRef] [Google Scholar]
- Non-intrusive, self-supplying, and wireless sensor for monitoring grounding cable in smart grids. Sensors Actuators A: Phys.. 2020;316:112417
- [CrossRef] [Google Scholar]
- An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Indust. Electron.. 2016;63(5):3137-3147.
- [CrossRef] [Google Scholar]
- Fault detection, classification and location for transmission lines and distribution systems: a review on the methods. High Voltage. 2016;1(1):25-33.
- [CrossRef] [Google Scholar]
- Smart fault location for smart grids. IEEE Trans. Smart Grid. 2011;2(1):11-22.
- [CrossRef] [Google Scholar]
- Maximum performance computing with dataflow engines. In High-performance computing using FPGAs. In: Vanderbauwhede W., Benkrid K., eds. High-Performance Computing Using FPGAs. New York, NY: Springer New York; 2013. p. :747-774.
- [Google Scholar]
- Design, development, and commissioning of a supervisory control and data acquisition (SCADA) laboratory for research and training. IEEE Trans. Power Systems. 2004;19(3):1582-1588.
- [CrossRef] [Google Scholar]
- Wide area protection and emergency control. In: Eighth IEE International Conference on Developments in Power System Protection. 2004. 10.1049/cp:20040230
- [Google Scholar]
- Artificial neural systems: A new tool for financial decision-making. Financial Anal. J.. 1990;46(6):63-72.
- [CrossRef] [Google Scholar]
- Dissolved gas analysis of mineral oil for power transformer fault diagnosis using fuzzy logic. IEEE Trans. Dielect. Elect. Insul.. 2013;20(3):974-981.
- [CrossRef] [Google Scholar]
- On-line fault detection of a fuel rod temperature measurement sensor in a nuclear reactor core using ANNs. Prog. Nuclear Energy. 2015;79:8-21.
- [CrossRef] [Google Scholar]
- Interpretability of polypharmacy deep-learning models. In: Proceedings of the Canadian Conference on Artificial Intelligence. 2021.
- [Google Scholar]
- Parallel processing for diagnostic problem-solving. In: Peng Y., Reggia J.A., eds. Abductive Inference Models for Diagnostic Problem-Solving. New York, NY: Springer New York; 1990. p. :227-253.
- [Google Scholar]
- Chin, H.C., 2002. Fault section diagnosis of power system using fuzzy logic. IEEE Power Engineering Review, 22(12), pp.62-62. https://doi.org/10.1109/MPER.2002.4311920.
- A review of fault diagnosing methods in power transmission systems. Appl. Sci.. 2020;10(4):1312.
- [CrossRef] [Google Scholar]
- Online and remote motor energy monitoring and fault diagnostics using wireless sensor networks. IEEE Trans. Indust. Electron.. 2009;56(11):4651-4659.
- [CrossRef] [Google Scholar]
- Artificial intelligence and internet of things to improve efficacy of diagnosis and remote sensing of solar photovoltaic systems: Challenges, recommendations and future directions. Renewable Sustainable Energy Rev.. 2021;143:110889
- [CrossRef] [Google Scholar]
- Unmanned substations employ multimedia network RTUs. IEEE Computer Appl. Power. 2002;15(2):36-40.
- [CrossRef] [Google Scholar]
- Energy-efficient thermal-aware task scheduling for homogeneous high-performance computing data centers: A cyber-physical approach. IEEE Trans. Parallel Distrib. Syst.. 2008;19(11):1458-1472.
- [CrossRef] [Google Scholar]
- Impedance-differential protection: a new approach to transmission-line pilot protection. IEEE Trans. Power Delive.. 2015;30(6):2510-2518.
- [CrossRef] [Google Scholar]
- Development of effective and efficient rainfall-runoff models using integration of deterministic, real-coded genetic algorithms and artificial neural network techniques. Water Resour. Res.. 2004;40(4)
- [CrossRef] [Google Scholar]
- Diagnosis for slight bearing fault in induction motor based on combination of selective features and machine learning. Energies. 2022;15(2):453.
- [CrossRef] [Google Scholar]
- Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mechan. Syst. Signal Process.. 2020;144:106861
- [CrossRef] [Google Scholar]
- Fault diagnosis of low speed bearing based on relevance vector machine and support vector machine. Expert Syst. Appl.. 2009;36(3):7252-7261.
- [CrossRef] [Google Scholar]
- Model-based analysis and quantification of bearing faults in induction machines. IEEE Trans. Industry Appl.. 2020;56(3):2158-2170.
- [CrossRef] [Google Scholar]
- An application of a discrete wavelet transform and a back-propagation neural network algorithm for fault diagnosis on single-circuit transmission line. Internat. J. Syst. Sci.. 2013;44(9):1745-1761.
- [CrossRef] [Google Scholar]
- Heart rate estimation from facial videos using a spatiotemporal representation with convolutional neural networks. IEEE Trans. Instrum. Measur.. 2020;69(10):7411-7421.
- [CrossRef] [Google Scholar]
- A multistage deep neural network model for blood pressure estimation using photoplethysmogram signals. Comput. Biol. Med.. 2020;120:103719
- [CrossRef] [Google Scholar]
- Multiple odontogenic keratocysts: a case report. Ann Dent. Summer-Fall. 1995;54(1–2):41-43.
- [Google Scholar]
- Usage of traditional Chinese medicine, western medicine and integrated chinese-western medicine for the treatment of allergic rhinitis. Off. J. Zhende Res. Group. 2020;1(1):1-9.
- [Google Scholar]
- Implementation of high dose rate brachytherapy in cancer treatment implementation of high dose rate brachytherapy in cancer treatment. SPR. 2021;1(3):77-106.
- [Google Scholar]
- Treatment and technology of domestic sewage for improvement of rural environment in China-Jiangsu: A research. SPR. 2022;2(2):466-475.
- [CrossRef] [Google Scholar]
- Prediction of suitability of soil for different crops using spatial data mining. Int. J. Eng. Adv. Technol.. 2019;9(1):2330-2337.
- [CrossRef] [Google Scholar]
- An Overview of application of Graph theory. Int. J. Chemtech Res.. 2016;9(2):242-248.
- [Google Scholar]
- Anomaly detection using one-class neural networks. Machine Learn. 2018:19-23.
- [CrossRef] [Google Scholar]




