

Optimal analysis of adaptive type-II progressive censored for new unit-lindley model
⁎Corresponding author at: Department of Mathematics, Faculty of Science, Khon Kaen University, Khon Kaen 40002, Thailand wajawe@kku.ac.th (Wajaree Weera),
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
The parameters, reliability, and hazard rate functions of the Unit-Lindley distribution based on adaptive Type-II progressive censored sample are estimated using both non-Bayesian and Bayesian inference methods in this study. The Newton–Raphson method is used to obtain the maximum likelihood and maximum product of spacing estimators of unknown values in point estimation. On the basis of observable Fisher information data, estimated confidence ranges for unknown parameters and reliability characteristics are created using the delta approach and the frequentist estimators’ asymptotic normality approximation. To approximate confidence intervals, two bootstrap approaches are utilized. Using an independent gamma density prior, a Bayesian estimator for the squared-error loss is derived. The Metropolis–Hastings algorithm is proposed to approximate the Bayesian estimates and also to create the associated highest posterior density credible intervals. Extensive Monte Carlo simulation tests are carried out to evaluate the performance of the developed approaches. For selecting the optimum progressive censoring scheme, several optimality criteria are offered. A practical case based on COVID-19 data is used to demonstrate the applicability of the presented methodologies in real-life COVID-19 scenarios.
Keywords
Adaptive Type-II progressive censoring
Bayesian estimator
Bootstrapping
Metropolis-Hasting algorithm
Reliability
Unit-Lindley distribution

1 Introduction
The life test finishes when the necessary effective sample is reached, thanks to adaptive Type-II progressive censoring. It also assures that the parametric inference and total duration test are both improved. Because many new goods have a long lifetime due to high manufacturing accuracy, obtaining failures is difficult with this high manufacturing technology, so we apply a censor scheme to decrease costs and time in lifetime studies. As a result, we require a suitable distribution capable of simulating failure times from censored experiments in this setting. As a result, we chose a really intriguing distribution for this investigation.
The one-parameter of New unit-Lindley (NUL) distribution was originally proposed by Mazucheli et al. (2019) by using transformation to the traditional Lindley distribution. But let’s say that the lifetime random variable X of a certain test item complies with
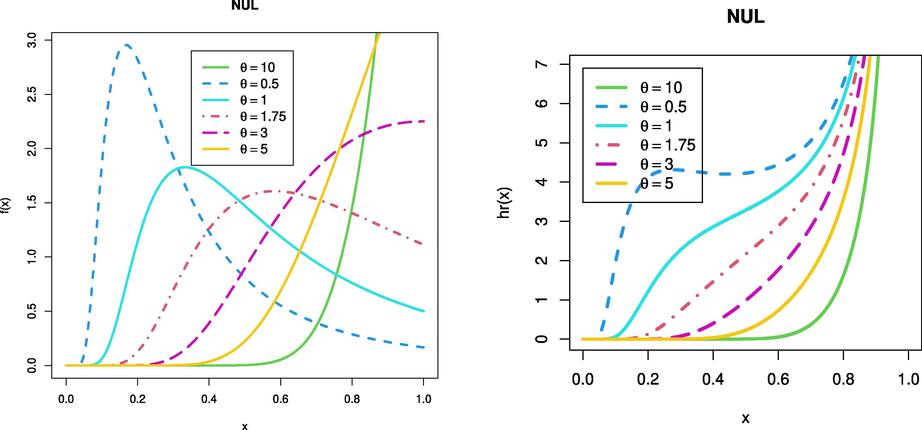
- Plots of the density and hazard rate functions of the NUL distribution.
In the context of censoring mechanisms, in recent few years, several works considered various statistical inferences of the unknown Lindley parameters. Goel and Krishna (2020) developed the progressive type-II (PCS-T2) random censoring scheme with Lindley failure and censoring time distributions. Hafez et al. (2020) discussed Lindley distribution with accelerated life tests. Developments of Weibull distribution are discussed in many papers (Aslam et al., 2011; Aslam et al., 2017). For more reading about distribution theory see (Lin et al., 2021 (2021).; Zhou et al., 2021; Alsuhabi et al., 2022; Wang et al., 2022; Alkhairy et al., 2022).
The lifetime of some products has greatly increased as a result of improvements in digital transformation and industrial design and technology. Even with progressive filtering, the duration test takes a long time in this case, and there are occasionally no (or few) failures during the test. Ng et al. (2009) offered adaptive Type-II progressive censoring algorithms as a result (APCS-T2). We propose (Balakrishnan and Cramer, 2014) for more information on how prevalent this censoring method has grown in survival analysis and reliability research. Briefly, the APCS-T2 is stated as: Assume progressive censoring, effective sample size of
In addition to the conventional likelihood function (LF) of APCS-T2 that is detailed in the previous sentence, the maximum product of spacing (MPS) technique is also taken into consideration to be a competitive way in (6). Cheng and Amin (1983) and Ranneby (1984) separately introduced and explored the PS technique as an alternate strategy for estimating parameter(s) of continuous univariate distributions. The maximum product spacing estimators methods (MPSEs) is comprehensively studied considering several cases as in Refs. (Anatolyev and Kosenok, 2005; Alshenawy et al., 2020; Alshenawy et al., 2021; Almetwally et al., 2023).
The APCS-T2 utilising the maximum PS approach,
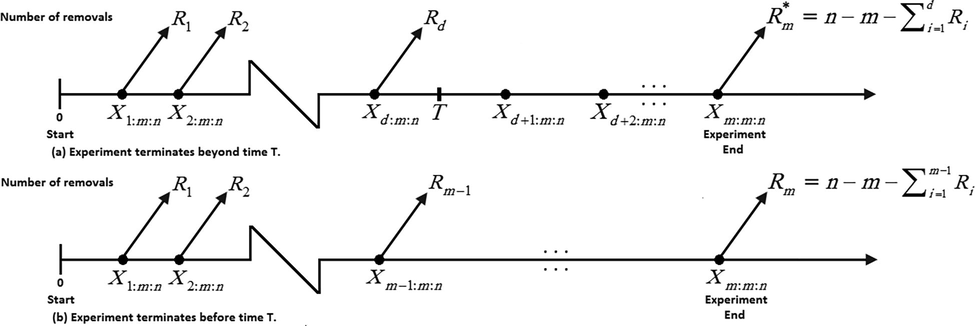
- Schematic illustration of Type-II adaptive progressively censoring.
Many papers discussed different points of COVID-19 data using several methods, such as: amma-distributed variables by Aslam et al. (2021), neutrosophic statistics by Sherwani et al. (2021), repetitive sampling under indeterminacy by Rao and Aslam (2021), and modeling to Factor Productivity of the United Kingdom by Alyami et al. (2022).
To our knowledge, no work has been published on applying adaptive Type-II progressive hybrid censoring to infer the NUL distribution’s model parameters and/or reliability traits, such as R and HRF, which is more significant in a range of real-world contexts. As a result, in this study, we will exclusively focus on both classical and Bayesian estimating methodologies to generate point and interval estimates of unknown model parameters, as well as some life parameters of the HD under APCS-T2, such as RF and HRF. In this paper, LF and MPS procedures, as well as the Bayesian estimate method, are applied. We estimated the (ACIs) of the NUL parameter are produced using the delta approach.
Using independent gamma priors, the likelihood function under squared-error loss (SEL) produces the Bayes estimate of the unknown parameter. The Bayes estimators and related credible ranges cannot be solved analytically, hence Markov chain Monte Carlo (MCMC) techniques are employed to create samples from the relevant posterior density functions. Finding the optimum censorship scheme from a collection of all conceivable removal patterns that provide a plethora of information about the unknown model parameter in issue is one of the most challenging tasks in dependability research. This is one of the most difficult aspects of the research process. One real data set of COVID-19 is investigated to illustrate the suggested methodologies’ application to real-world phenomena and to highlight the NUL distribution’s superiority. Finally, we formulate some particular suggestions based on the numerical data.
The remainder of the work in the paper is structured as follows: The traditional estimate of an unknowable parameter, in addition to the features of dependability, is presented here in Section 2. In Section 3, we begin the process of developing the Bayesian estimate based on the SEL function utilising each of the provided frequentist functions. In Section 4, The most optimal ideas for progressive censorship are discussed here. Section 5 presents the simulated findings. In Section 6 an optimal censoring strategy is also suggested along with a real data analysis that, which is offered for demonstrative purposes. Finally, we include the paper’s main findings in Section 7.
2 Classical inference
Using data collected using the suggested censoring approach, this section will employ the LF and MPS procedures to generate point and interval estimators for the unknown parameters, as well as the reliability aspects of the NUL distribution. Prior to proceeding, let us assume that
2.1 Maximum likelihood estimator
Without taking into account any additive constants, (2) and (1) are substituted into the likelihood function (6) to produce
The related log-likelihood function for (8) is
Differentiating (9) partially with respect to the parameter
As it seems, from (10), analytic solution of MLE of
2.2 Maximum product of spacings estimators
Substituting (2) and (1) into (7), the product of spacings (7) becomes
From (11), the MPSE
Differentiating (12) partially in respect of
The MPSE lacks an explicit form, just like the MLE. As a result, the NR approach is employed to quantitatively determine the MPSE from (13) for a simulation or particular datasets. Cheng and Amin (1983) proved that MPSE is a superior method of estimation. Since the MPSE possess the invariance principle similar to the MLE, the MPSE
2.3 Asymptotic confidence intervals
In this section we used the Fisher’s information matrix
The approximate VarCov matrix,
In a similar manner, by finding the derivative of (12) at their MPSE
The Fisher’s element as in (14) and (15) are obtained and provided as following:
The estimated variances of
Hence, using the concept of large sample theory for MLE
In a similar pattern, from (15), the associated variance of
3 Bayesian estimators
Bayesian inference has risen to prominence in a variety of sectors, including but not limited to engineering, biology, clinical medicine, and so on. Its capacity to use prior information in the analysis makes it particularly valuable in dependability studies, where one of the major obstacles is data availability. The reliability parameters
3.1 Prior information and loss function
Using independent gamma priors is an easy approach that can result in findings with more explicit posterior density expressions because the gamma distribution can have a range of shapes based on its parameter values. As a result, we investigated the gamma density prior, which is more adjustable in terms of altering support for the NUL distribution parameter than more difficult prior distributions. As a result, it is believed that the NUL parameter
The choice of the symmetric loss function is a key issue in Bayesian analysis, according to the literature. The most often employed symmetric loss function in this study for estimating the considered unknown quantities is the SEL function,
3.2 Posterior analysis by LF
We can easily express the posterior PDF
The joint posterior PDF of
The posterior expectation of
It is abundantly clear that the posterior distribution of
As expect, similar to the case of Bayesian inference using LF approach, the posterior distribution (21) of
The MH technique is a very useful MCMC strategy since it can generate random samples from a posterior density distribution with an independent proposal distribution, as well as calculate Bayes estimates and generate HPD credible intervals. Furthermore, this technique provides an easy-to-apply chain form of the Bayesian estimate from a practical standpoint. Please see (Gelman et al., 2004 and Lynch, 2007) for further information on this algorithm. The procedures that are outlined below need to be carried out in order to successfully produce random samples by using the assist MH algorithm.
We used the MH algorithm generate failure times that follows the NUL distribution to estimate the NUL parameter:
|
Step 1: Start with initial guess
|
|
Step 2: Set
|
|
Step 3: Generate
|
| (a) Calculate
|
| (b) Obtain
|
| (c) Generate sample variates
|
| (d) If
|
|
Step 4: Compute the RF (3) and HRF (4), for a given distinct time
|
|
|
| and |
|
|
|
Step 5: Set
|
|
Step 6: Redo steps 2–5 for
|
|
|
| Now, to construct the HPD credible interval of
|
So by refering to (Chen and Shao, 1999), We can easily obtain the credible interval.
4 Optimum progressive censoring plans
When samples are acquired via censoring, we need an optimal plane, the preceding sections dealt with estimation methods of some lifetime parameters of
Following (Ng et al., 2004), when the values of n(total test units), m(effective sample) and T is the time where the experiment is terminated, we can determine the optimal censoring design (
Regarding to criteria OA, our goal is minimization the determinant and trace of the VarCov matrix, while our goal regarding to criterion OCis maximization the main diagonal elements of the Fisher’s matrix
With reference to the OAcriterion, the goal that we have set for ourselves is to reduce the value of the VarCov matrices
5 Generating simulated data data for estimation purpose
In this part we made a simulation experiment to asses the various estimation techniques, on the basis of adaptive Type-II progressive samples collected using a variety of methods for censoring.
5.1 Simulation purpose
Several simulation experiments were carried out to evaluate the performance of various item parameter estimation methodologies based on different schemes. The majority of studies, on the other hand, concentrated on likelihood estimation, product spacing, and Bayesian estimation. In addition, simulation research compares the efficacy of likelihood and product spacing estimation approaches to traditional estimation methods. Furthermore, sample size, censored adaptive time (t), censored progressive size (m), and censored sample schemes are all changed in a methodical manner. For the simulated data sets, the multiple methods indicated in Sections 2 and 3 were employed to estimate model parameters. To acquire the appropriate MLE and MPS, the iterative NR approach can be numerically implemented using the’maxLik’ package. Using an approximation normal distribution, the asymptotic confidence intervals were calculated. The MH method was used in order to generate Bayesian estimators that were dependent on the gamma prior.
For each predicted model parameter, the Bias (BS), mean square error (ME), and length of confidence intervals (LCONF) were calculated. The results of several schemes for estimating point parameters are shown in Tables 1–4. Table 5 illustrate the results of various strategies for optimal censoring scheme. Tables 1–4 present the findings, which include some intriguing data.
|
|
MLE | MPS | Bayesiam | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | scheme | T | BS | ME | LCONF | BS | ME | LCONF | BS | ME | LCONF | |
| 20 | I | 0.5 |
|
0.0133 | 0.0057 | 0.2908 | −0.0042 | 0.0051 | 0.2974 | 0.0144 | 0.0019 | 0.1528 |
|
|
0.0073 | 0.0016 | 0.1561 | −0.0020 | 0.0015 | 0.1594 | 0.0078 | 0.0006 | 0.0824 | |||
|
|
−0.0255 | 0.0233 | 0.5900 | 0.0102 | 0.0213 | 0.5356 | −0.0290 | 0.0080 | 0.3107 | |||
| 0.8 |
|
0.0075 | 0.0048 | 0.2705 | −0.0097 | 0.0045 | 0.2772 | 0.0078 | 0.0018 | 0.1557 | ||
|
|
0.0013 | 0.0001 | 0.0387 | −0.0011 | 0.0001 | 0.0391 | 0.0012 | 0.0000 | 0.0220 | |||
|
|
−0.0058 | 0.0031 | 0.2169 | 0.0079 | 0.0029 | 0.1951 | −0.0062 | 0.0012 | 0.1251 | |||
| II | 0.5 |
|
0.0109 | 0.0064 | 0.3102 | −0.0106 | 0.0058 | 0.3184 | 0.0156 | 0.0025 | 0.1654 | |
|
|
0.0060 | 0.0018 | 0.1662 | −0.0054 | 0.0017 | 0.1703 | 0.0085 | 0.0007 | 0.0891 | |||
|
|
−0.0203 | 0.0260 | 0.6279 | 0.0236 | 0.0244 | 0.5616 | −0.0312 | 0.0101 | 0.3369 | |||
| 0.8 |
|
0.0102 | 0.0056 | 0.2911 | −0.0114 | 0.0051 | 0.2987 | 0.0098 | 0.0025 | 0.1864 | ||
|
|
0.0018 | 0.0001 | 0.0417 | −0.0013 | 0.0001 | 0.0420 | 0.0015 | 0.0001 | 0.0265 | |||
|
|
−0.0080 | 0.0036 | 0.2334 | 0.0093 | 0.0033 | 0.2052 | −0.0078 | 0.0016 | 0.1496 | |||
| III | 0.5 |
|
0.0078 | 0.0048 | 0.2709 | −0.0112 | 0.0045 | 0.2794 | 0.0114 | 0.0016 | 0.1426 | |
|
|
0.0044 | 0.0014 | 0.1454 | −0.0058 | 0.0013 | 0.1496 | 0.0062 | 0.0005 | 0.0768 | |||
|
|
−0.0144 | 0.0200 | 0.5513 | 0.0245 | 0.0191 | 0.4943 | −0.0230 | 0.0066 | 0.2912 | |||
| 0.8 |
|
0.0122 | 0.0055 | 0.2879 | −0.0070 | 0.0050 | 0.2948 | 0.0116 | 0.0024 | 0.1748 | ||
|
|
0.0020 | 0.0001 | 0.0415 | −0.0007 | 0.0001 | 0.0419 | 0.0018 | 0.0001 | 0.0249 | |||
|
|
−0.0097 | 0.0036 | 0.2306 | 0.0058 | 0.0032 | 0.2056 | −0.0092 | 0.0015 | 0.1403 | |||
| 25 | I | 0.5 |
|
0.0094 | 0.0048 | 0.2703 | −0.0077 | 0.0045 | 0.2778 | 0.0118 | 0.0017 | 0.1397 |
|
|
0.0052 | 0.0014 | 0.1452 | −0.0040 | 0.0013 | 0.1489 | 0.0064 | 0.0005 | 0.0753 | |||
|
|
−0.0177 | 0.0199 | 0.5485 | 0.0172 | 0.0187 | 0.4970 | −0.0237 | 0.0068 | 0.2850 | |||
| 0.8 |
|
0.0106 | 0.0051 | 0.2775 | −0.0066 | 0.0047 | 0.2847 | 0.0082 | 0.0019 | 0.1558 | ||
|
|
0.0018 | 0.0001 | 0.0401 | −0.0007 | 0.0001 | 0.0405 | 0.0013 | 0.0000 | 0.0222 | |||
|
|
−0.0083 | 0.0033 | 0.2223 | 0.0055 | 0.0030 | 0.2008 | −0.0065 | 0.0012 | 0.1251 | |||
| II | 0.5 |
|
0.0094 | 0.0048 | 0.2703 | −0.0077 | 0.0045 | 0.2778 | 0.0118 | 0.0017 | 0.1397 | |
|
|
0.0052 | 0.0014 | 0.1452 | −0.0040 | 0.0013 | 0.1489 | 0.0064 | 0.0005 | 0.0753 | |||
|
|
−0.0177 | 0.0199 | 0.5485 | 0.0172 | 0.0187 | 0.4970 | −0.0237 | 0.0068 | 0.2850 | |||
| 0.8 |
|
0.0106 | 0.0051 | 0.2775 | −0.0066 | 0.0047 | 0.2847 | 0.0082 | 0.0019 | 0.1558 | ||
|
|
0.0018 | 0.0001 | 0.0401 | −0.0007 | 0.0001 | 0.0405 | 0.0013 | 0.0000 | 0.0222 | |||
|
|
−0.0083 | 0.0033 | 0.2223 | 0.0055 | 0.0030 | 0.2008 | −0.0065 | 0.0012 | 0.1251 | |||
| III | 0.5 |
|
0.0030 | 0.0050 | 0.2781 | −0.0146 | 0.0049 | 0.2854 | 0.0089 | 0.0016 | 0.1370 | |
|
|
0.0018 | 0.0014 | 0.1491 | −0.0076 | 0.0014 | 0.1528 | 0.0049 | 0.0005 | 0.0738 | |||
|
|
−0.0045 | 0.0208 | 0.5653 | 0.0314 | 0.0205 | 0.5118 | −0.0178 | 0.0065 | 0.2801 | |||
| 0.8 |
|
0.0064 | 0.0048 | 0.2719 | −0.0113 | 0.0046 | 0.2794 | 0.0080 | 0.0021 | 0.1679 | ||
|
|
0.0012 | 0.0001 | 0.0390 | −0.0013 | 0.0001 | 0.0395 | 0.0013 | 0.0000 | 0.0239 | |||
|
|
−0.0050 | 0.0031 | 0.2180 | 0.0092 | 0.0030 | 0.1960 | −0.0064 | 0.0014 | 0.1348 | |||
| n = 100 |
|
MLE | MPS | Bayesiam | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | scheme | T | BS | ME | LCONF | BS | ME | LCONF | BS | ME | LCONF | |
| 70 | I | 0.5 |
|
0.00349 | 0.00143 | 0.14787 | −0.00359 | 0.00139 | 0.15264 | 0.00385 | 0.00038 | 0.07383 |
|
|
0.00194 | 0.00042 | 0.07964 | −0.00187 | 0.00040 | 0.08213 | 0.00209 | 0.00011 | 0.03982 | |||
|
|
−0.00668 | 0.00599 | 0.30241 | 0.00781 | 0.00585 | 0.28389 | −0.00778 | 0.00161 | 0.15104 | |||
| 0.8 |
|
0.00278 | 0.00141 | 0.14699 | −0.00415 | 0.00138 | 0.15181 | 0.00296 | 0.00044 | 0.07739 | ||
|
|
0.00047 | 0.00003 | 0.02083 | −0.00050 | 0.00003 | 0.02139 | 0.00044 | 0.00001 | 0.01097 | |||
|
|
−0.00218 | 0.00091 | 0.11803 | 0.00338 | 0.00089 | 0.11084 | −0.00236 | 0.00028 | 0.06215 | |||
| II | 0.5 |
|
0.00300 | 0.00184 | 0.16766 | −0.00606 | 0.00179 | 0.17317 | 0.00470 | 0.00055 | 0.08472 | |
|
|
0.00169 | 0.00053 | 0.09026 | −0.00318 | 0.00052 | 0.09310 | 0.00255 | 0.00016 | 0.04566 | |||
|
|
−0.00556 | 0.00767 | 0.34271 | 0.01301 | 0.00753 | 0.31784 | −0.00946 | 0.00229 | 0.17348 | |||
| 0.8 |
|
0.00225 | 0.00181 | 0.16649 | −0.00675 | 0.00178 | 0.17248 | 0.00441 | 0.00062 | 0.09191 | ||
|
|
0.00042 | 0.00004 | 0.02358 | −0.00084 | 0.00004 | 0.02424 | 0.00066 | 0.00001 | 0.01303 | |||
|
|
−0.00175 | 0.00117 | 0.13370 | 0.00548 | 0.00115 | 0.12413 | −0.00352 | 0.00040 | 0.07380 | |||
| III | 0.5 |
|
0.00392 | 0.00166 | 0.15888 | −0.00393 | 0.00160 | 0.16407 | 0.00460 | 0.00047 | 0.08006 | |
|
|
0.00218 | 0.00048 | 0.08554 | −0.00204 | 0.00046 | 0.08823 | 0.00250 | 0.00014 | 0.04317 | |||
|
|
−0.00750 | 0.00692 | 0.32482 | 0.00857 | 0.00674 | 0.30415 | −0.00929 | 0.00195 | 0.16383 | |||
| 0.8 |
|
0.00184 | 0.00164 | 0.15867 | −0.00601 | 0.00162 | 0.16388 | 0.00305 | 0.00053 | 0.08443 | ||
|
|
0.00036 | 0.00003 | 0.02250 | −0.00075 | 0.00003 | 0.02309 | 0.00046 | 0.00001 | 0.01195 | |||
|
|
−0.00143 | 0.00106 | 0.12740 | 0.00488 | 0.00105 | 0.11906 | −0.00244 | 0.00034 | 0.06781 | |||
| 90 | I | 0.5 |
|
0.00464 | 0.00148 | 0.14987 | −0.00234 | 0.00142 | 0.15464 | 0.00451 | 0.00043 | 0.07379 |
|
|
0.00256 | 0.00043 | 0.08074 | −0.00120 | 0.00041 | 0.08324 | 0.00245 | 0.00012 | 0.03978 | |||
|
|
−0.00903 | 0.00617 | 0.30613 | 0.00526 | 0.00597 | 0.28802 | −0.00911 | 0.00177 | 0.15107 | |||
| 0.8 |
|
0.00285 | 0.00140 | 0.14608 | −0.00402 | 0.00137 | 0.15114 | 0.00311 | 0.00043 | 0.07831 | ||
|
|
0.00048 | 0.00003 | 0.02071 | −0.00048 | 0.00003 | 0.02131 | 0.00046 | 0.00001 | 0.01104 | |||
|
|
−0.00224 | 0.00090 | 0.11730 | 0.00327 | 0.00088 | 0.11039 | −0.00249 | 0.00028 | 0.06292 | |||
| II | 0.5 |
|
0.00386 | 0.00149 | 0.15070 | −0.00364 | 0.00144 | 0.15579 | 0.00435 | 0.00042 | 0.07727 | |
|
|
0.00214 | 0.00043 | 0.08117 | −0.00189 | 0.00042 | 0.08381 | 0.00236 | 0.00012 | 0.04168 | |||
|
|
−0.00743 | 0.00623 | 0.30827 | 0.00793 | 0.00607 | 0.28872 | −0.00879 | 0.00176 | 0.15806 | |||
| 0.8 |
|
0.00456 | 0.00153 | 0.15211 | −0.00297 | 0.00146 | 0.15708 | 0.00465 | 0.00044 | 0.07958 | ||
|
|
0.11349 | 0.00033 | 0.26225 | 0.11016 | 0.00032 | 0.26037 | 0.11339 | 0.00010 | 0.17294 | |||
|
|
−1.74988 | 0.00496 | 3.91412 | −1.73674 | 0.00477 | 3.88490 | −1.75003 | 0.00142 | 2.41465 | |||
| III | 0.5 |
|
0.00532 | 0.00151 | 0.15090 | −0.00189 | 0.00144 | 0.15585 | 0.00495 | 0.00044 | 0.07746 | |
|
|
0.00292 | 0.00044 | 0.08130 | −0.00096 | 0.00042 | 0.08389 | 0.00268 | 0.00013 | 0.04178 | |||
|
|
−0.01042 | 0.00628 | 0.30816 | 0.00435 | 0.00604 | 0.28948 | −0.01000 | 0.00183 | 0.15840 | |||
| 0.8 |
|
0.00515 | 0.00150 | 0.15050 | −0.00206 | 0.00143 | 0.15537 | 0.00408 | 0.00047 | 0.08238 | ||
|
|
0.00081 | 0.00003 | 0.02139 | −0.00021 | 0.00003 | 0.02195 | 0.00060 | 0.00001 | 0.01169 | |||
|
|
−0.00409 | 0.00097 | 0.12082 | 0.00170 | 0.00092 | 0.11322 | −0.00327 | 0.00030 | 0.06615 | |||
| n = 30 |
|
MLE | MPS | Bayesiam | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | scheme | T | BS | ME | LCONF | BS | ME | LCONF | BS | ME | LCONF | |
| 20 | I | 0.5 |
|
0.07811 | 0.10605 | 1.23993 | −0.00859 | 0.09023 | 1.26431 | 0.06006 | 0.05093 | 0.83788 |
|
|
0.00758 | 0.00358 | 0.23264 | −0.00985 | 0.00379 | 0.25589 | 0.00830 | 0.00177 | 0.16227 | |||
|
|
−0.06057 | 0.11204 | 1.29111 | 0.03368 | 0.10788 | 1.18714 | −0.05438 | 0.05564 | 0.90109 | |||
| 0.8 |
|
0.04013 | 0.10076 | 1.23494 | −0.04288 | 0.09235 | 1.26292 | −0.00378 | 0.02248 | 0.59113 | ||
|
|
0.00516 | 0.00244 | 0.19283 | −0.00798 | 0.00233 | 0.19986 | −0.00088 | 0.00057 | 0.09436 | |||
|
|
−0.02511 | 0.04886 | 0.86131 | 0.03326 | 0.04583 | 0.77103 | 0.00340 | 0.01120 | 0.41716 | |||
| II | 0.5 |
|
0.04543 | 0.11946 | 1.34381 | −0.05941 | 0.10767 | 1.37049 | 0.04215 | 0.05750 | 0.88786 | |
|
|
−0.00069 | 0.00456 | 0.26486 | −0.02253 | 0.00536 | 0.29510 | 0.00392 | 0.00208 | 0.17544 | |||
|
|
−0.01998 | 0.13372 | 1.43204 | 0.09606 | 0.14067 | 1.30589 | −0.03242 | 0.06400 | 0.96101 | |||
| 0.8 |
|
0.03818 | 0.12130 | 1.35774 | −0.06554 | 0.11077 | 1.38348 | −0.00757 | 0.02323 | 0.58820 | ||
|
|
0.00459 | 0.00293 | 0.21163 | −0.01181 | 0.00282 | 0.21936 | −0.00149 | 0.00060 | 0.09392 | |||
|
|
−0.02307 | 0.05875 | 0.94628 | 0.04986 | 0.05527 | 0.82809 | 0.00610 | 0.01161 | 0.41517 | |||
| III | 0.5 |
|
0.06349 | 0.09776 | 1.20070 | −0.03060 | 0.08554 | 1.23486 | 0.05213 | 0.05195 | 0.80928 | |
|
|
0.00495 | 0.00365 | 0.23616 | −0.01434 | 0.00405 | 0.26257 | 0.00649 | 0.00187 | 0.16325 | |||
|
|
−0.04594 | 0.10948 | 1.28511 | 0.05756 | 0.10960 | 1.17510 | −0.04512 | 0.05791 | 0.88730 | |||
| 0.8 |
|
0.04310 | 0.11262 | 1.30524 | −0.05084 | 0.10145 | 1.32711 | −0.00546 | 0.02381 | 0.60574 | ||
|
|
0.00548 | 0.00269 | 0.20230 | −0.00936 | 0.00254 | 0.20923 | −0.00117 | 0.00061 | 0.09660 | |||
|
|
−0.02683 | 0.05417 | 0.90676 | 0.03918 | 0.05019 | 0.79912 | 0.00463 | 0.01187 | 0.42726 | |||
| 25 | I | 0.5 |
|
0.05821 | 0.10630 | 1.25818 | −0.02679 | 0.09329 | 1.27835 | 0.04564 | 0.04725 | 0.80986 |
|
|
0.00343 | 0.00361 | 0.23541 | −0.01393 | 0.00398 | 0.25880 | 0.00555 | 0.00168 | 0.16271 | |||
|
|
−0.03821 | 0.11147 | 1.30085 | 0.05493 | 0.11150 | 1.19864 | −0.03906 | 0.05229 | 0.88696 | |||
| 0.8 |
|
0.05003 | 0.10048 | 1.22760 | −0.03430 | 0.09041 | 1.25590 | 0.00327 | 0.02452 | 0.58620 | ||
|
|
0.00675 | 0.00243 | 0.19148 | −0.00659 | 0.00228 | 0.19862 | 0.00022 | 0.00062 | 0.09356 | |||
|
|
−0.03211 | 0.04863 | 0.85566 | 0.02714 | 0.04479 | 0.76395 | −0.00152 | 0.01221 | 0.41366 | |||
| II | 0.5 |
|
0.05392 | 0.11166 | 1.29405 | −0.03940 | 0.09923 | 1.31972 | 0.04825 | 0.05616 | 0.81585 | |
|
|
0.00181 | 0.00409 | 0.25096 | −0.01740 | 0.00463 | 0.27747 | 0.00538 | 0.00195 | 0.16193 | |||
|
|
−0.03160 | 0.12324 | 1.37199 | 0.07110 | 0.12576 | 1.26060 | −0.03972 | 0.06103 | 0.88742 | |||
| 0.8 |
|
0.02950 | 0.09872 | 1.22879 | −0.06142 | 0.09152 | 1.25458 | 0.00426 | 0.02716 | 0.61283 | ||
|
|
0.00349 | 0.00241 | 0.19239 | −0.01093 | 0.00234 | 0.19936 | 0.00035 | 0.00070 | 0.09793 | |||
|
|
−0.01766 | 0.04803 | 0.85815 | 0.04633 | 0.04570 | 0.75581 | −0.00213 | 0.01356 | 0.43278 | |||
| III | 0.5 |
|
0.02358 | 0.09729 | 1.21984 | −0.06352 | 0.09121 | 1.24510 | 0.03533 | 0.04641 | 0.79062 | |
|
|
−0.00364 | 0.00400 | 0.24752 | −0.02199 | 0.00465 | 0.27159 | 0.00342 | 0.00171 | 0.15936 | |||
|
|
−0.00080 | 0.11469 | 1.32819 | 0.09642 | 0.12185 | 1.21858 | −0.02762 | 0.05229 | 0.87280 | |||
| 0.8 |
|
0.02447 | 0.08881 | 1.16483 | −0.06217 | 0.08354 | 1.19365 | −0.00210 | 0.02254 | 0.57255 | ||
|
|
0.00281 | 0.00219 | 0.18301 | −0.01095 | 0.00214 | 0.19015 | −0.00061 | 0.00058 | 0.09146 | |||
|
|
−0.01443 | 0.04341 | 0.81522 | 0.04660 | 0.04185 | 0.72020 | 0.00221 | 0.01124 | 0.40421 | |||
| n = 100 |
|
MLE | MPS | Bayesiam | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | scheme | T | BS | ME | LCONF | BS | ME | LCONF | BS | ME | L.CI | |
| 70 | I | 0.5 |
|
0.01368 | 0.02543 | 0.62308 | −0.02003 | 0.02472 | 0.64530 | 0.01778 | 0.00955 | 0.36295 |
|
|
0.00057 | 0.00108 | 0.12894 | −0.00652 | 0.00115 | 0.13741 | 0.00288 | 0.00039 | 0.07579 | |||
|
|
−0.00860 | 0.03133 | 0.69343 | 0.02929 | 0.03197 | 0.65386 | −0.01749 | 0.01165 | 0.40709 | |||
| 0.8 |
|
0.01333 | 0.02639 | 0.63498 | −0.02046 | 0.02560 | 0.65618 | −0.00026 | 0.01130 | 0.41902 | ||
|
|
0.00181 | 0.00066 | 0.10080 | −0.00359 | 0.00065 | 0.10474 | −0.00018 | 0.00029 | 0.06677 | |||
|
|
−0.00857 | 0.01304 | 0.44665 | 0.01528 | 0.01277 | 0.41536 | 0.00055 | 0.00562 | 0.29536 | |||
| II | 0.5 |
|
0.02336 | 0.03730 | 0.75297 | −0.02148 | 0.03511 | 0.77595 | 0.02491 | 0.01491 | 0.45041 | |
|
|
0.00155 | 0.00155 | 0.15456 | −0.00780 | 0.00164 | 0.16553 | 0.00390 | 0.00061 | 0.09278 | |||
|
|
−0.01636 | 0.04524 | 0.83286 | 0.03374 | 0.04546 | 0.77671 | −0.02410 | 0.01804 | 0.50106 | |||
| 0.8 |
|
−0.00523 | 0.04657 | 0.84920 | −0.04835 | 0.04688 | 0.87392 | 0.00413 | 0.01535 | 0.47562 | ||
|
|
−0.00141 | 0.00117 | 0.13441 | −0.00831 | 0.00120 | 0.13925 | 0.00047 | 0.00039 | 0.07608 | |||
|
|
0.00519 | 0.02299 | 0.59652 | 0.03566 | 0.02342 | 0.55537 | −0.00243 | 0.00763 | 0.33598 | |||
| III | 0.5 |
|
0.01622 | 0.02970 | 0.67292 | −0.02190 | 0.02857 | 0.69541 | 0.02174 | 0.01122 | 0.39453 | |
|
|
0.00072 | 0.00125 | 0.13876 | −0.00728 | 0.00133 | 0.14825 | 0.00356 | 0.00046 | 0.08106 | |||
|
|
−0.01032 | 0.03641 | 0.74724 | 0.03246 | 0.03703 | 0.70107 | −0.02151 | 0.01357 | 0.44048 | |||
| 0.8 |
|
0.01952 | 0.03071 | 0.68305 | −0.01913 | 0.02934 | 0.70621 | 0.00059 | 0.01257 | 0.42289 | ||
|
|
0.00274 | 0.00077 | 0.10850 | −0.00342 | 0.00075 | 0.11285 | −0.00006 | 0.00032 | 0.06759 | |||
|
|
−0.01280 | 0.01518 | 0.48064 | 0.01446 | 0.01466 | 0.44419 | −0.00001 | 0.00626 | 0.29856 | |||
| 90 | I | 0.5 |
|
0.01595 | 0.02683 | 0.63940 | −0.01800 | 0.02593 | 0.66155 | 0.02048 | 0.00971 | 0.36610 |
|
|
0.00094 | 0.00110 | 0.13017 | −0.00618 | 0.00116 | 0.13877 | 0.00344 | 0.00039 | 0.07527 | |||
|
|
−0.01081 | 0.03240 | 0.70467 | 0.02731 | 0.03289 | 0.66510 | −0.02050 | 0.01170 | 0.40713 | |||
| 0.8 |
|
0.00625 | 0.02552 | 0.62607 | −0.02743 | 0.02529 | 0.64808 | 0.00005 | 0.01099 | 0.40932 | ||
|
|
0.00069 | 0.00065 | 0.09966 | −0.00470 | 0.00065 | 0.10370 | −0.00013 | 0.00028 | 0.06544 | |||
|
|
−0.00359 | 0.01266 | 0.44105 | 0.02019 | 0.01266 | 0.41039 | 0.00032 | 0.00547 | 0.28906 | |||
| II | 0.5 |
|
0.00669 | 0.02905 | 0.66824 | −0.02981 | 0.02879 | 0.69192 | 0.02096 | 0.01105 | 0.39218 | |
|
|
−0.00125 | 0.00127 | 0.13949 | −0.00898 | 0.00138 | 0.14897 | 0.00341 | 0.00045 | 0.07988 | |||
|
|
0.00028 | 0.03620 | 0.74653 | 0.04145 | 0.03779 | 0.70404 | −0.02068 | 0.01345 | 0.43381 | |||
| 0.8 |
|
0.04285 | 0.01456 | 0.46032 | 0.00511 | 0.01288 | 0.50041 | −0.00629 | 0.01706 | 0.53974 | ||
|
|
0.00668 | 0.00037 | 0.07322 | 0.00066 | 0.00033 | 0.07997 | −0.00122 | 0.00043 | 0.08564 | |||
|
|
−0.02980 | 0.00720 | 0.32404 | −0.00319 | 0.00642 | 0.30005 | 0.00499 | 0.00843 | 0.37952 | |||
| III | 0.5 |
|
0.00976 | 0.02581 | 0.62896 | −0.02525 | 0.02534 | 0.65147 | 0.01796 | 0.01008 | 0.37859 | |
|
|
−0.00030 | 0.00110 | 0.13028 | −0.00769 | 0.00119 | 0.13909 | 0.00287 | 0.00041 | 0.07714 | |||
|
|
−0.00407 | 0.03188 | 0.70009 | 0.03536 | 0.03292 | 0.65855 | −0.01755 | 0.01217 | 0.42086 | |||
| 0.8 |
|
0.02542 | 0.03124 | 0.68598 | −0.01001 | 0.02954 | 0.70832 | 0.00296 | 0.01177 | 0.41113 | ||
|
|
0.00368 | 0.00078 | 0.10850 | −0.00197 | 0.00075 | 0.11265 | 0.00033 | 0.00030 | 0.06560 | |||
|
|
−0.01695 | 0.01536 | 0.48149 | 0.00802 | 0.01466 | 0.44884 | −0.00171 | 0.00586 | 0.28998 | |||
|
|
0.5 | 2 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MLE | MPS | MLE | MPS | ||||||||
| n | m | scheme | T | OA | OC | OA | OC | OA | OB | OA | OB |
| 30 | 20 | I | 0.5 | 0.0048 | 225.7908 | 0.0045 | 243.9068 | 0.0968 | 11.4770 | 0.0881 | 12.5959 |
| 0.8 | 0.0047 | 229.6864 | 0.0044 | 247.9647 | 0.0931 | 11.9890 | 0.0848 | 13.1381 | |||
| II | 0.5 | 0.0063 | 176.5038 | 0.0056 | 196.2457 | 0.1219 | 9.3657 | 0.1069 | 10.6403 | ||
| 0.8 | 0.0062 | 176.3355 | 0.0056 | 196.1297 | 0.1208 | 9.4740 | 0.1060 | 10.7555 | |||
| III | 0.5 | 0.0053 | 203.7151 | 0.0049 | 222.6259 | 0.1070 | 10.3663 | 0.0960 | 11.5435 | ||
| 0.8 | 0.0054 | 200.9505 | 0.0050 | 219.6044 | 0.1055 | 10.6952 | 0.0946 | 11.9081 | |||
| 25 | I | 0.5 | 0.0049 | 223.3205 | 0.0045 | 242.2051 | 0.0943 | 11.8159 | 0.0859 | 12.9588 | |
| 0.8 | 0.0049 | 219.6029 | 0.0045 | 238.1382 | 0.0934 | 11.9265 | 0.0851 | 13.0775 | |||
| II | 0.5 | 0.0047 | 229.8023 | 0.0043 | 247.9950 | 0.1062 | 10.6007 | 0.0953 | 11.7915 | ||
| 0.8 | 0.0047 | 229.2013 | 0.0044 | 247.3693 | 0.1030 | 10.8290 | 0.0925 | 12.0370 | |||
| III | 0.5 | 0.0049 | 223.3205 | 0.0045 | 242.2051 | 0.0963 | 11.6089 | 0.0871 | 12.8119 | ||
| 0.8 | 0.0049 | 219.6029 | 0.0045 | 238.1382 | 0.0961 | 11.5097 | 0.0869 | 12.6964 | |||
| 100 | 70 | I | 0.5 | 0.001363 | 751.6687 | 0.0013 | 775.5172 | 0.0264 | 38.9621 | 0.0255 | 40.4475 |
| 0.8 | 0.001359 | 753.7221 | 0.0013 | 777.3200 | 0.0264 | 39.0039 | 0.0255 | 40.4942 | |||
| II | 0.5 | 0.001822 | 567.1312 | 0.0017 | 592.1566 | 0.0358 | 29.2234 | 0.0339 | 30.8144 | ||
| 0.8 | 0.001813 | 569.0676 | 0.0017 | 594.1779 | 0.0346 | 30.5052 | 0.0328 | 32.1412 | |||
| III | 0.5 | 0.001557 | 660.2465 | 0.0015 | 684.3431 | 0.0302 | 34.2304 | 0.0289 | 35.7577 | ||
| 0.8 | 0.001545 | 665.5071 | 0.0015 | 689.8785 | 0.0304 | 34.0902 | 0.0291 | 35.6245 | |||
| 90 | I | 0.5 | 0.001359 | 754.1792 | 0.0013 | 777.7722 | 0.0264 | 39.0655 | 0.0254 | 40.5605 | |
| 0.8 | 0.001348 | 759.2773 | 0.0013 | 782.8261 | 0.0261 | 39.4680 | 0.0251 | 40.9778 | |||
| II | 0.5 | 0.001480 | 692.6544 | 0.0014 | 716.5519 | 0.0285 | 36.2596 | 0.0274 | 37.7977 | ||
| 0.8 | 0.001485 | 690.7716 | 0.0014 | 714.6820 | 0.0295 | 34.3695 | 0.0283 | 35.8470 | |||
| III | 0.5 | 0.001423 | 720.3284 | 0.001378 | 743.8884 | 0.0274 | 37.6821 | 0.0263 | 39.1925 | ||
| 0.8 | 0.001422 | 720.8488 | 0.001377 | 744.4365 | 0.0279 | 37.1577 | 0.0268 | 38.6517 | |||
5.2 Simulation design
For the NUL model, a censored sample was generated in the simulation research. We modified six items in the simulation.
-
Two levels, n = 30 and 100, were produced by manipulating the sample size (n) of the entire sample.
-
We used two levels, the first one when m = 20, and 25 when n = 30, and the second one is when m = 70, and 90 when n = 100.
-
The time of the censored adaptive (T) sample where
-
The true value of
-
Three schemes of censored sample were considered simulated as follows:
Scheme I:
Scheme II:
Scheme III:
-
These two different groups of parameter values each have their own set of elective hyperparameters, which assign values to those hyperparameters.
5.3 Simulation outcome observations
The accuracy of the estimators are increased with the size of the used sample grows. Also, we can observe that the estimates are consistent, where the relation between ME and the sample size is opposite in all situations, means the ME decreases with sample size increases. It noted that, the Bayes estimates of MPS have the lowest ME in the vast majority of situations from the comparison among several estimates. The L-CI for estimates approaches 0 as ngrows, suggesting that the CI is the shortest. The ME and BS for the parameters, survival function, and hazard rate function decrease as the value of T grows. The ME of the MLE is smaller than the ME of MPS for the survival function; however, the ME of MPS is smaller than MLE.
6 Real-life applications
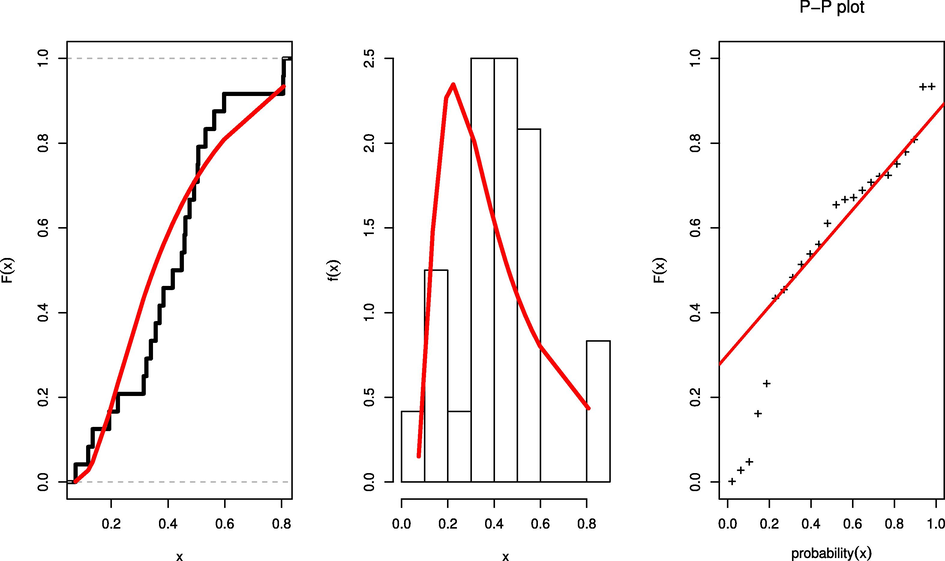
We fit the NUL distribution by using COVID-19 data and we using this model to chose the optimal censoring scheme to compute the reliability and hazard rate by different methods. The data set of COVID-19 collected from France that takes 24 days, in the period from October 1 to October 24, 2021.
These are the used data set taking the daily death rate during the calculations: 0.0740, 0.1190, 0.1344, 0.1926, 0.2232, 0.3140, 0.3243, 0.3393, 0.3563, 0.3706, 0.3843, 0.4164, 0.4482, 0.4578, 0.4616, 0.4755, 0.4917, 0.5045, 0.5069, 0.5325, 0.5625, 0.5972, 0.8057, 0.8078.
Table 6 show the MLE, MPS and Bayeeian estimators with stander error (SE). By referring to Fig. 3, show the fitting by using draw the estimated cdf, pdf and P-P plot for NUL distribution and we concluded that the NUL distribution is fit of this data. The Kolmogorov–Smirnov (KS) distance and accompanying p-value are calculated using MLE is 0.22554 and 0.1487 respectively. The data is fit of this model by using KS test where with a p-value of each method are more the 0.05 (see Fig. 4).
| scheme | T | estimates | SE | R(0.5) | hr(0.5) | OA | OC | |
|---|---|---|---|---|---|---|---|---|
| Compelete | 0.5 | MLE | 0.6703 | 0.1009 | 0.2832 | 3.8877 | 0.0102 | 98.2152 |
| MPS | 0.6311 | 0.0950 | 0.2621 | 3.9644 | 0.0090 | 110.9182 | ||
| Bayesian | 0.6784 | 0.1001 | 0.2875 | 3.8721 | ||||
| I | MLE | 0.6720 | 0.1013 | 0.2841 | 3.8845 | 0.0103 | 97.4508 | |
| MPS | 0.6324 | 0.0953 | 0.2621 | 3.9644 | 0.0091 | 110.1131 | ||
| Bayesian | 0.6750 | 0.0983 | 0.2857 | 3.8787 | ||||
| 0.8 | MLE | 0.6720 | 0.1013 | 0.0697 | 6.3973 | 0.0103 | 97.4508 | |
| MPS | 0.6324 | 0.0953 | 0.0636 | 6.4287 | 0.0091 | 110.1131 | ||
| Bayesian | 0.6750 | 0.0983 | 0.0702 | 6.3950 | ||||
| II | 0.5 | MLE | 0.7120 | 0.1174 | 0.3053 | 3.8074 | 0.0138 | 72.5456 |
| MPS | 0.6629 | 0.1094 | 0.2792 | 3.9022 | 0.0120 | 83.5013 | ||
| Bayesian | 0.7132 | 0.1171 | 0.3059 | 3.8052 | ||||
| 0.8 | MLE | 0.6301 | 0.1029 | 0.0632 | 6.4306 | 0.0106 | 94.4318 | |
| MPS | 0.5898 | 0.0961 | 0.0571 | 6.4626 | 0.0092 | 108.3555 | ||
| Bayesian | 0.6369 | 0.1023 | 0.0642 | 6.4252 | ||||
| III | 0.5 | MLE | 0.6451 | 0.1010 | 0.2697 | 3.9368 | 0.0102 | 98.0148 |
| MPS | 0.6059 | 0.0947 | 0.2485 | 4.0142 | 0.0090 | 111.5282 | ||
| Bayesian | 0.6496 | 0.0991 | 0.2721 | 3.9282 | ||||
| 0.8 | MLE | 0.6942 | 0.1092 | 0.0732 | 6.3798 | 0.0119 | 83.8348 | |
| MPS | 0.6504 | 0.1024 | 0.0663 | 6.4145 | 0.0105 | 95.3477 | ||
| Bayesian | 0.6965 | 0.1057 | 0.0736 | 6.3780 | ||||
- Estimated cdf, pdf and PP plot for NUL distribution.
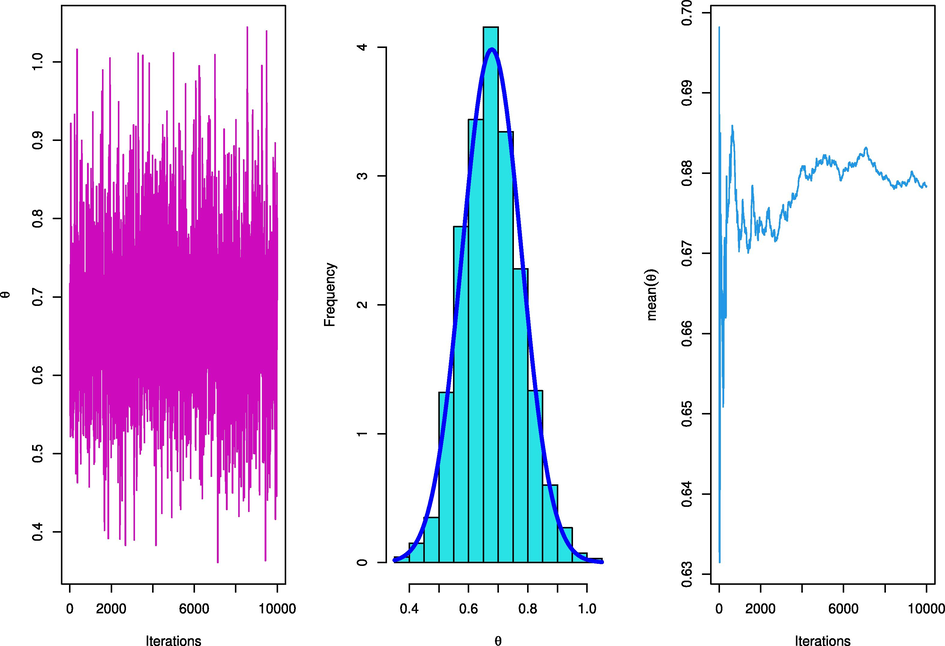
- The trace plots and marginal posterior probability density function of the parameter.
7 Conclusion remarks
We evaluated the maximum likelihood and Bayes estimators of unknown parameters using an adaptive Type-II progressive hybrid censoring scheme. Additionally, we evaluated the reliability and hazard rate functions of the NUL model.The square error loss function is used to determine the Bayes estimators. We employed the M-H algorithm and Monte Carlo Markov Chain methods because the Bayes estimators aren’t available in closed form. The performance of the suggested technique is investigated Monte Carlo simulation for several points and interval technique. A real data set of repairable mechanical equipment item sets is investigated to prove applicability of the presented concept. The obtained results proved that the suggested approach in the paper is valuable to data analysts and reliability practitioners. In the future work, we can study the derivation of Bayes estimates based on truncated independent normal priors in comparison with the obtained the results in this paper.
Acknowledgment
This research received funding support from the NSRF via the Program Management Unit for Human Resources & Institutional Development, Research and Innovation, (Grant No. B05F650018).
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- A comparative inference on reliability estimation for a multi-component stress-strength model under power Lomax distribution with applications. AIMS Math. 2022;7:18050-18079.
- [Google Scholar]
- A new flexible logarithmic-X family of distributions with applications to biological systems. Complexity. 2022;2022
- [Google Scholar]
- Adaptive Type-II progressive censoring schemes based on maximum product spacing with application of generalized Rayleigh distribution. J. Data Sci.. 2019;17(4):802-831.
- [Google Scholar]
- Maximum product spacing estimation of Weibull distribution under adaptive type-II progressive censoring schemes. Ann. Data Sci.. 2020;7(2):257-279.
- [Google Scholar]
- Analysis of unit-Weibull based on progressive type-II censored with optimal scheme. Alexandria Eng. J.. 2023;63(1):321-338.
- [CrossRef] [Google Scholar]
- Progressive type-II censoring schemes of extended odd Weibull exponential distribution with applications in medicine and engineering. Mathematics. 2020;8(10):1679.
- [Google Scholar]
- Product spacing of stress–strength under progressive hybrid censored for exponentiated-gumbel distribution. Comput. Mater. Continua. 2021;66(3):2973-2995.
- [Google Scholar]
- A superior extension for the Lomax distribution with application to Covid-19 infections real data. Alexandria Eng. J.. 2022;61(12):11077-11090.
- [Google Scholar]
- Modeling to factor productivity of the United Kingdom Food Chain: using a new lifetime-generated family of distributions. Sustainability. 2022;14(14):8942.
- [Google Scholar]
- An alternative to maximum likelihood based on spacings. Econometric Theory. 2005;21(2):472-476.
- [Google Scholar]
- A reliability sampling plan based on progressive interval censoring under Pareto distribution of second kind. Ind. Eng. Manage. Syst.. 2011;10(2):154-160.
- [Google Scholar]
- An attribute control chart for a Weibull distribution under accelerated hybrid censoring. PloS One. 2017;12(3):e0173406.
- [Google Scholar]
- Aslam, M., Rao, G.S., Saleem, M., Sherwani, R.A.K., Jun, C.H., 2021. Monitoring mortality caused by COVID-19 using gamma-distributed variables based on generalized multiple dependent state sampling. Comput. Mathe. Methods Med. 2021.
- Progressive Censoring Theory, Methods and Applications. Boston, MA: Birkhäuser; 2000.
- The Art of Progressive Censoring. Birkhäuser, New York: Springer; 2014.
- Stress-strength reliability for the unit-lindley distribution with an application. Calcutta Stat. Assoc. Bull.. 2021;73(1):7-23.
- [Google Scholar]
- Monte Carlo estimation of Bayesian credible and HPD intervals. J. Comput. Graphical Stat.. 1999;8:69-92.
- [Google Scholar]
- Estimating parameters in continuous univariate distributions with a shifted origin. J. Roy. Stat. Soc. B. 1983;45(3):394-403.
- [Google Scholar]
- Progressive Type-II hybrid censored schemes based on maximum product spacing with application to Power Lomax distribution. Physica A. 2020;553:124251.
- [Google Scholar]
- Bayesian Data Analysis (2nd ed.). USA: Chapman and Hall/CRC; 2004.
- Progressive type-II random censoring scheme with Lindley failure and censoring time distributions. Int. J. Agric. Stat. Sci.. 2020;16(1):23-34.
- [Google Scholar]
- Econometric Analysis (4th ed.). NewYork: Prentice-Hall; 2000.
- Study on Lindley distribution accelerated life tests: Application and numerical simulation. Symmetry. 2020;12(12):2080.
- [Google Scholar]
- The exponentiated unit Lindley distribution: properties and applications. Ricerche mat.. 2021;1–23
- [CrossRef] [Google Scholar]
- Statistical Models and Methods For Lifetime Data (2nd ed.). New Jersey: John Wiley and Sons; 2003.
- Impact of facebook and newspaper advertising on sales: a comparative study of online and print media. Comput. Intell. Neurosci. 2021 (2021).
- [Google Scholar]
- Introduction to Applied Bayesian Statistics and Estimation for Social Scientists. New York: Springer; 2007.
- On the one parameter unit-Lindley distribution and its associated regression model for proportion data. J. Appl. Stat.. 2019;46(4):700-714.
- [Google Scholar]
- A new one-parameter unit-Lindley distribution. Chilean J. Stat. (ChJS). 2020;11(1):53-67.
- [Google Scholar]
- Optimal progressive censoring plans for the Weibull distribution. Technometrics. 2004;46:470-481.
- [Google Scholar]
- Statistical analysis of exponential lifetimes under an adaptive Type-II progressive censoring scheme. Naval Res. Logist.. 2009;56(8):687-698.
- [Google Scholar]
- Inference and optimal censoring schemes for progressively censored Birnbaum-Saunders distribution. J. Stat. Plann. Inference. 2013;143:1098-1108.
- [Google Scholar]
- The maximum spacing method. An estimation method related to the maximum likelihood method. Scand. J. Stat.. 1984;11:93-112.
- [Google Scholar]
- Inspection plan for COVID-19 patients for Weibull distribution using repetitive sampling under indeterminacy. BMC Med. Res. Methodol.. 2021;21(1):1-15.
- [Google Scholar]
- A new neutrosophic sign test: An application to COVID-19 data. PloS One. 2021;16(8):e0255671.
- [Google Scholar]
- Analysis of cryptocurrency exchange rates vs USA dollars using a new Dagum model. Alexandria Eng. J. 2022
- [Google Scholar]
- Impact of YouTube Advertising on Sales with Regression Analysis and Statistical Modeling: Usefulness of Online Media in Business. Comput. Intell. Neurosci.. 2021;2021
- [Google Scholar]




