

Translate this page into:
Numerical solution of singular boundary value problems using Green’s function and Sinc-Collocation method
⁎Corresponding author. rashidinia@iust.ac.ir (J. Rashidinia)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
This study is the construction of the Green’s function and Sinc function for a class of nonhomogeneous singular boundary value problems (SBVPs). The equivalent Volterra-Fredholm integral equations can be derived from SBVPs by applying Green’s function. This can be approximated by Sinc-Collocation method. Convergence analysis is given. Our approach applied on three various examples. Errors in the solution are demonstrated in the tables. We conclude that our approach converge rapidly with the exponential order.
Keywords
Nonhomogeneous singular boundary value problems
Lane-Emden type equations
Green’s function
Integral equations
Sinc-Collocation method
65L10
65L60
65R20
45B05
45D05

1 Introduction
We consider a class of nonhomogeneous SBVPs:
If has singularity at such as with , then the problems (1)–(2) is called Lane-Emden type equations. We assume that constants and , and likewise and , both are not zero. The unique solution of problems (1) subjected to the boundary conditions (2) is depend on the following conditions on , and :
E1. Let is measurable on and continuous on ;
E2. on ;
E3. ;
E4. Let is continuous on .
The Lane-Emden equations is the model for several phenomena in physics and astrophysics Parand and Pirkhedri, 2010; Wazwaz, 2011; Yuzbası and Sezer, 2013.
Many researchers have tried to solve problems (1)–(2) numerically. Mohanty et al. Mohanty et al., 2004 using cubic spline method for solving SBVPs. Variational iteration scheme by Wazwaz Wazwaz, 2011. Pirabaharan et al. Pirabaharan and Chandrakumar, 2016 discussed a new Bernstein polynomials method. The modified Bessel Collocation by Suayip Yuzbası, et al. Yuzbası and Sezer, 2013.
The Sinc function is widely used in various numerical methods which introduced by F. Stenger Stenger, 1993; Stenger, 2011. Rashidinia Rashidinia and Nabati, 2013; Rashidinia and Taheri, 2015 used Sinc methods based on Sinc function for SBVPs.
The Green’ function is used for solving BVPs in one, two, and three dimensionalRahman, 2007. Z. Cen Cen, 2006 used Green’s function to developed equivalent integral equation for SBVPs. Singh et al. Singh et al., 2013 using Adomian decomposition and Green’s function.
In this paper, we apply a new direction for approximating the nonhomogeneous SBVPs (1)–(2) which can be reduced to a Volterra-Fredholm integral equation with the help of Green’s function. In our approach, the convergence accuracy of the solution is , where , and also converges at an optimal rate, because the singularity on the boundary of approximation is ignoredRashidinia and Zarebnia, 2007; Rashidinia and Zarebnia, 2007.
Section 2 deals with representation of the solution of the SBVPs (1)–(2) by Green’s function. In Section 3, after some preliminary definitions and theorems of Sinc function, the Sinc-Collocation method has been used to replace Volterra-Fredholm integral equation corresponding to problems (1)–(2). The converges of the methods are considered in Section 4. Finally, three test examples are presented in Section 5 and the conclusion is considered in the rest of the section.
2 Representation of the Green’s function
The method of variation of parameter is used to construct Green’s function for an integral representation of nonhomogeneous SBVPs (1)–(2). First of all, we convert the nonhomogeneous boundary conditions (2) to homogeneous Stenger, 1993, then we define an interpolating boundary function
Consequently, the problems (1)–(2) reduce to the following problem:
The homogeneous part of Eqs. (5) is:
Let and be two solutions of problem (7) which are linearly independent. By using variation of parameters (see Rahman, 2007), the Green’s function of (5) and (6) can easily be constructed as:
It is obvious that is matched with boundary conditions (6). The properties of the are summarised in appendix A.
Now, by using (8), a particular solution of Eqs. 5,6 in integral form can be obtained as:
The proof of Eq. (10) is in the appendix B.
3 Sinc function preliminaries and the Sinc-Collocation method
We first introduce some preliminaries of Sinc function, Sinc interpolation Stenger, 1993; Stenger, 2011 that are important here, and then we discussed the Sinc-Collocation method.
3.1 Some preliminary results using Sinc function
Definition.Stenger, 1993 We assume that is a simply connected domain in the complex plane. We consider two separate points 0 and 1 of (boundary of ). In , we define a conformal map , which has inverse . For , and a step size , we consider which is the Sinc points.
Theorem 1. We assume is the set of all analytic functions and for . By considering , there exist a constant , so
We define the basis function as follows:
The proof of this theorem is given in Stenger, 1993.
Theorem 2.Stenger, 1993 We cosider , (), and . By selecting , there exist a constant, , so
Theorem 3.Stenger, 1993 We cosider , and . By selecting , there exist a constant, , there fore, for the trapezoidal quadrature rule in the Sinc methods is:
3.2 Sinc-Collocation method
The approximate solution of integral Eq. (10) by the Sinc basis function (12) is:
The boundary basis functions and are cubic Hermite functions given by:
Upon replacing in the Volterra-Fredholm integral Eq. (10) by , and Sinc function defined in 12, and applying Theorem 2, for the first and second terms (Volterra integral equation) on the right hand side of (10), and Theorem 3, for the third term (Fredholm integral equation) of (10), and setting points , we get the following system:
Where
The matrix form of the system (20) is:
We replace the right hand side of the system (20) by as follows:
In solving system (22), we apply Newton’s method with , which stop iteration whenever .
4 Convergence analysis
By the following theorem, we proof that the Volterra-Fredholm Eq. (9) has the unique solution.
Theorem 4. We consider the assumptions (E1)-(E4), and Green’s function 8, so we have.
I.,
II. .
Proof. (i) The proof is clear. It follows from the Green’s function (8) and the assumptions (E1)-(E4).(ii) For , we have
Hence,
Because, satisfies the differential Eq. (5) as follows:
Hence, from (23) we have
Hence, we obtain , and then.
.
Theorem 5. We assume that and are the approximate and exact solutions of integral Eq. (10) respectively. Suppose that all conditions of Theorems 1, 2, and 3 are fulfilled. By considering and , there exist a constant , so
Proof. Using the relations (11), (15), and (17), we have
By considering , we havethen the proof is completed.
Theorem 5 demonstrates that the mentioned method converges at the rate of , where .
5 Numerical results
In this section, three examples are presented based on the Green’s function and the Sinc-Collocation method Parand and Pirkhedri, 2010; Yuzbası and Sezer, 2013 for illustrating the effectiveness and importance of the proposed method. All experiments were performed in Mathematica 11.0. Also, in order to show the errors and the accuracy of the approximation, on the set of sinc grid pointswe apply the following criteria:
1. The relative error is defined by
(25)2. The maximum absolute error is defined by
(26)3. The root mean square (RMS) error is defined for by
(27)4. The error norm is defined by
(28)
In our presented method, we take and we applied our procedure for , and 50 and by using we can achieve h. The consistency of approximate and exact solution is shown in the Figures. By increasing N, the errors have been decreased in the Tables.
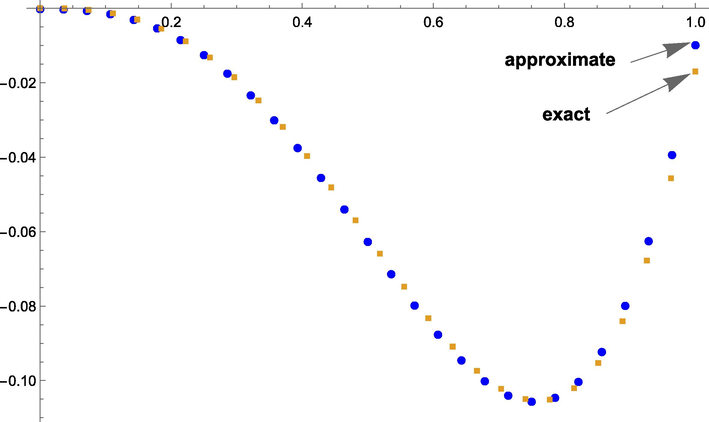
Example 1. We consider the following SBVP:
This problem has the exact solution , and by using (8) the Green’s function is:
By increasing N, we tabulated the relative errors (25) in Table 1. Table 2 lists the errors (26)–(28). The graph of the approximate and exact solutions is in Fig. 1 which are coincide together. Fig. 2, illustrates LogPlot of the relative errors. In this example, we have in the system (22) for a list of N.
x
N
RMS
10
20
30
40
50
Comparison between the exact and approximate solutions of Example 1 with .
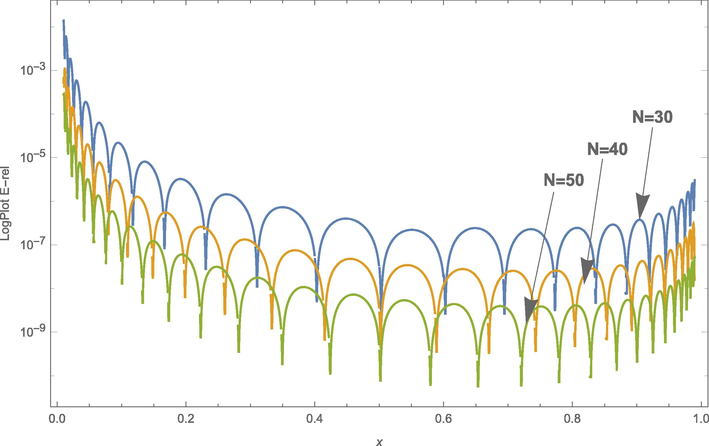
LogPlot of the relative errors of Example 1 with different values of N.
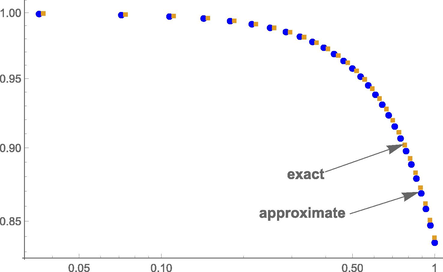
Example 2. We consider the following SBVP:
The exact solution is: . This may be transformed into the following form with homogeneous boundary conditions. If we use the relations (3) and (4), then we have:
By using (8), the Green’s function is
By increasing N, we tabulated the relative errors (25) in Table 3. Table 4 is consist of list of the errors (26)–(28), and Cond. The log–log plot of the approximate and exact solutions is in the Fig. 3.
x
N
RMS
10
20
30
40
50
Log–LogPlot of the exact and approximate solutions of Example 2 with .
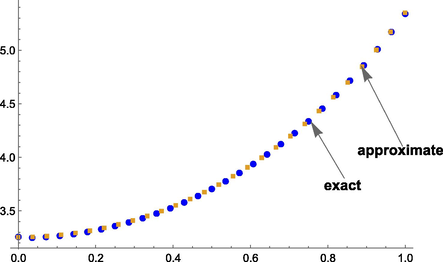
Example 3. We consider the following SBVP:
The exact solution is: . By using (8), the Green’s function is
By increasing N, we tabulated the relative errors (25) in Table 5 and Table 6 is consist of list of the errors (26)–(28), and Cond. Fig. 4 shows the graph of the approximate and exact solutions which are coincide together.
x
N
RMS
10
20
30
40
50
Comparison between the exact and approximate solutions of Example 3 with .
6 Conclusion
In this paper, we have demonstrated that Sinc-Collocation method based on Green’s function can be applied to solving a class of nonhomogeneous SBVPs. Numerical results indicate that by increasing N, the accuracy increases. In our approach, the convergence accuracy of the solution is , where . This approach can be extended to the high dimensional (2D-3D) problems. According to our knowledge so far, we may need the use of Laplace transform to be combine with our approach.
Acknowledgments
The authors would like to thank the respected reviewers for the useful suggestions and comments.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Numerical study for a class of SBVPs using Green’s functions. Appl. Math. Comput.. 2006;183:10-16.
- [Google Scholar]
- An accurate cubic spline TAGE method for nonlinear SBVPs. Appl. Math. Comput.. 2004;158:853-868.
- [Google Scholar]
- A computational method for solving a class of SBVPs arising in science and engineering. Egypt. J. Basic Appl.. 2016;sciences,3:383-391.
- [Google Scholar]
- Sinc-Collocation method for solving astrophysics equations. J. New Astron.. 2010;15:533-537.
- [Google Scholar]
- Integral Equations and their Applications. Canada: Dalhousie University; 2007.
- Sinc-Galerkin and Sinc-Collocation methods in the solution of nonlinear two-point BVPs. Comp. Appl. Math.. 2013;32:315-330.
- [Google Scholar]
- Convergence of approximate solution of system of Fredholm integral equations. J. Math. Anal.. 2007;333:1216-1227.
- [Google Scholar]
- Solution of a Voltera integral equation by the sinc-Collocation method. J. Comput. Appl. Math.. 2007;206:801-813.
- [Google Scholar]
- Sinc methods involving exponential transformations to solve Lane-Emden type equations. J. Afr. Mat.. 2015;27:541-554.
- [Google Scholar]
- Numerical solution of SBVPs using Green’s function and improved decomposition method. J. Appl. Math. Comput.. 2013;43:409-425.
- [Google Scholar]
- Numerical Method Based on Sinc and Analytic Functions. New York Inc: Springer-Verlag; 1993.
- Handbook of Sinc Numerical Methods. Boca Raton: CRC Press; 2011.
- The variational iteration method for solving nonlinear SBVPs arising in various physical models. Commun. Nonlin. Sci. Num. Simult.. 2011;16:3881-3886.
- [Google Scholar]
- An improved Bessel collocation method with a residual error function to solve a class of Lane-Emden differential equations. J. Math. Comput. Modell.. 2013;57 1298–131
- [Google Scholar]
Appendix A
The properties of the are summarised as follows: I. Boundary conditions: II. The condition of Continuity: III. Jump discontinuity of the gradient:
Then a solution of the given BVPs (5)–(6) can be obtained as:




