

Translate this page into:
Numerical computation of BCOPs1 in two variables for solving the vibration problem of a CF-elliptical plate
*Present address: Department of Mathematics, College of Science, Ain Shams University, Abbassia 11566, Cairo, Egypt salehmh@hotmail.com (Saleh M. Hassan)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Abstract
Boundary characteristic orthogonal polynomials in xy-coordinates have been built up over an elliptical domain occupied by a thin elastic plate. Half of the plate boundary is taken clamped while the other half is kept free. Coefficients of these polynomials have been computed once and for all so that an orthogonal polynomial sequence is generated from a set of linearly independent functions satisfying the essential boundary conditions of the problem. Use of this sequence in Rayleigh–Ritz method for solving the free vibration problem of the plate makes it faster in convergence and leads to a simplified system whose solution is comparatively easier. Three-dimensional solution surfaces and the associated contour lines have been plotted in some selected cases. Comparison have been made with known results whenever available.
Keywords
Elliptical plates
Nonuniform boundary conditions
Orthogonal polynomials
Vibration

Notation
- BCOPs
-
boundary characteristic orthogonal polynomials
- CC
-
for a plate with uniform fully clamped boundary
- CF
-
for a plate with half of the boundary, , clamped and the rest free
- FF
-
for a plate with uniform completely free boundary
-
semi major and minor axes of the elliptical domain
- r
-
aspect ratio
-
cartesian coordinates
-
non-dimensional coordinates
-
domain occupied by the plate in xy-coordinate
- R
-
domain occupied by the plate in XY-coordinates
-
displacement
-
density of the material of the plate
- E
-
Young's modulus
-
angular natural frequency
-
Poisson ratio
-
non-dimensional frequency parameter
-
Laplacian operator
- N
-
the approximation order
-
the unknown coefficients used in the solution expansion
-
orthogonal functions over R
-
orthonormal functions over R
-
coefficients of the orthogonal polynomials
-
functions of x and y
-
inner product of f and g
-
norm of f
-
matrices
1 Introduction
Use of orthogonal polynomials in the Rayleigh–Ritz method for solving most of the important differential equations has attracted the researcher's interest since 19th century. Many studies on the vibration of non-rectangular plates assuming various deflection shape functions in the Rayleigh–Ritz method have been reported by Leissa (1969). Following the publications of Szego's well known treatise Szego (1967) and Singh and Chakraverty (1991, 1992, 1993, 1994a,b) there has been tremendous growth of literature covering various aspects of the subject but, unfortunately, for plates of uniform boundary conditions. Sato (1973) presented experimental as well as theoretical results for elliptic plates but again with uniform free edge. An interesting contribution in this regard has been done by Bhat et al. (1998) and Chakraverty et al. (1999). They presented a recurrence scheme that makes the generation of two-dimensional boundary characteristic orthogonal polynomials for a variety of geometries straight forward and quite efficient. They also provide a survey of the application of BCOPs method in vibration problems. Some important books on orthogonal polynomials and its applications are Beckmann (1973), Chihara (1978), and Gautschi et al. (1999).
There is no analytical solution to the vibration problems of plates with non-uniform boundary conditions even for plates of simple geometrical shapes like rectangles (Wei et al., 2001). Very little is available in literature on elliptical plates with non-uniform boundary conditions and, whenever available, it is mostly on circular plates. That is why this kind of problems has become a challenging problem for scientists and engineers. Some available references are Eastep and Hemmig (1982), Hemmig (1975), Leissa et al. (1979), Laura and Ficcadenti (1981) and Narita and Leissa (1981). Hassan (2007) has generated BCOPs to compute natural frequencies of an elliptical plate with half of the boundary simply supported and the rest free and gave numerical and graphical results for this case. In Hassan (2004) he solved the vibration problem under consideration by using traditional basis functions that satisfy the essential boundary conditions of the CF-elliptical plate in the Rayleigh–Ritz method. Explicit numerical and graphical results have been given and reported for the first time. Other publications dealing with plates with mixed boundary conditions have been recently appeared by Boborykin (2006), Czernous (2006), and Zovatto and Nicolini (2006). They investigated the bending problem of a rectangular plate with mixed boundary conditions. No numerical results are available for vibrations of elliptical plates with mixed boundary conditions.
The aim of the present work is to generate a sequence of boundary characteristic orthogonal polynomials over an elliptical domain occupied by a thin elastic plate with half of the boundary, , clamped and the rest free. These polynomials should satisfy at least the essential boundary conditions of the problem. The coefficients of these polynomials will be generated and tabulated in advance, once and for all, with the desired precision. Use of these polynomials in Rayliegh–Ritz method helped in presenting explicit numerical results for the problem under consideration. This method reduces ill-conditioning of the resulting system whose solution has become comparatively easier and faster in convergence. Three-dimensional solution surfaces, mode shapes, and the associated contour lines of the problem have been plotted in some selected cases. Comparison of results have been made with known results in literature whenever available.
2 Generation of boundary characteristic orthogonal polynomials
As has been done by Bhat (1985) for one-dimensional orthogonal polynomials and by Liew et al. (1990) for rectangular plates one will follow the same procedures to generate a set of orthogonal polynomials in two variables over an elliptical domain
occupied by a thin elastic plate in the xy-plane with half of the boundary,
, clamped and the rest free. For this one can start with the set of linearly independent functions
3 Rayleigh–Ritz procedures
For a plate undergoing simple harmonic motion equating the maximum strain energy
and the maximum kinetic energy
of the deformed plate the Rayleigh quotient (see Siddiqi, 2004) is
4 Numerical results and discussion
The function u in (2) has been so chosen that the essential boundary conditions of the elliptical plate are satisfied. Consequently the essential boundary conditions of the problem are thus satisfied by the functions
also. Finally BCOPs can be expressed in terms of
by computing
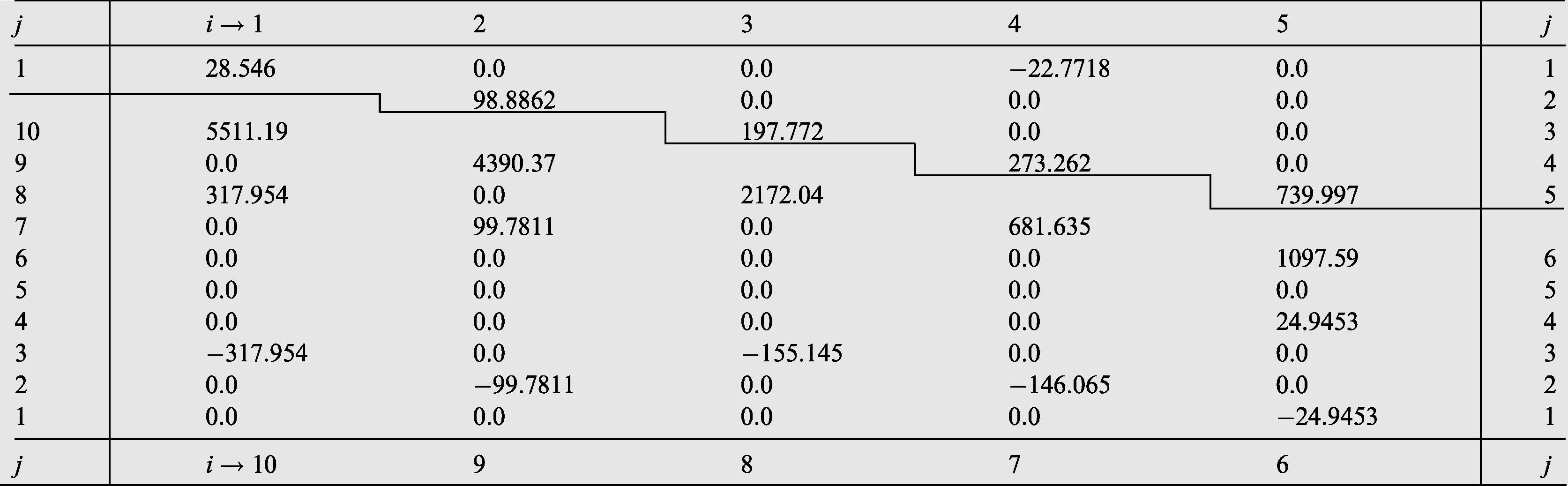
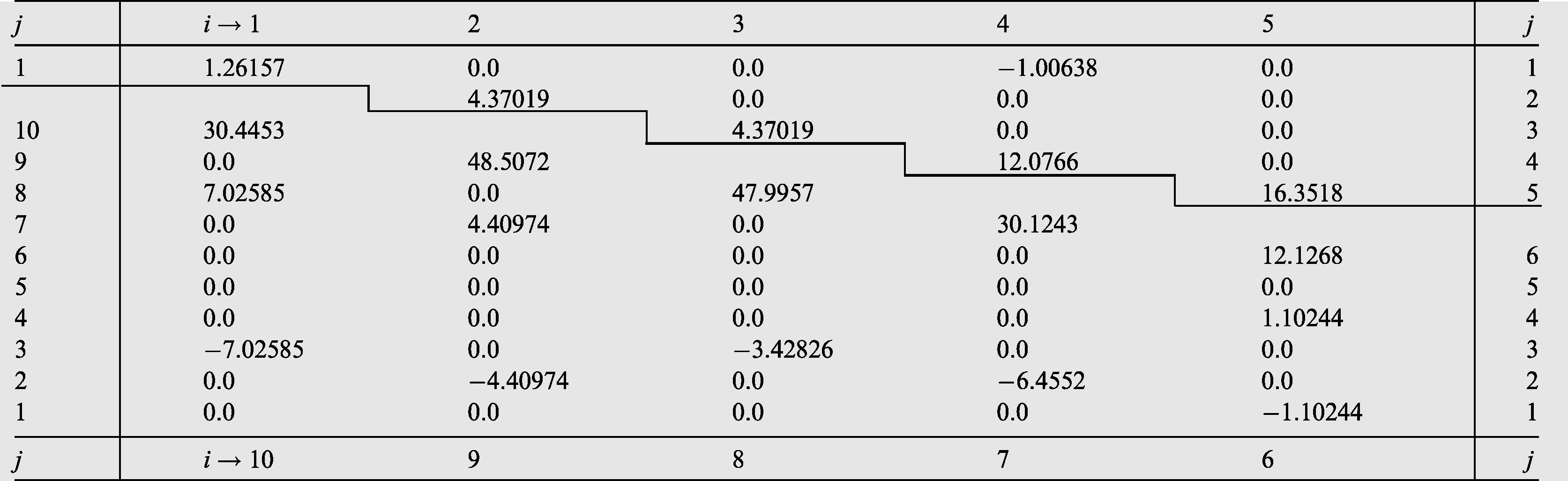
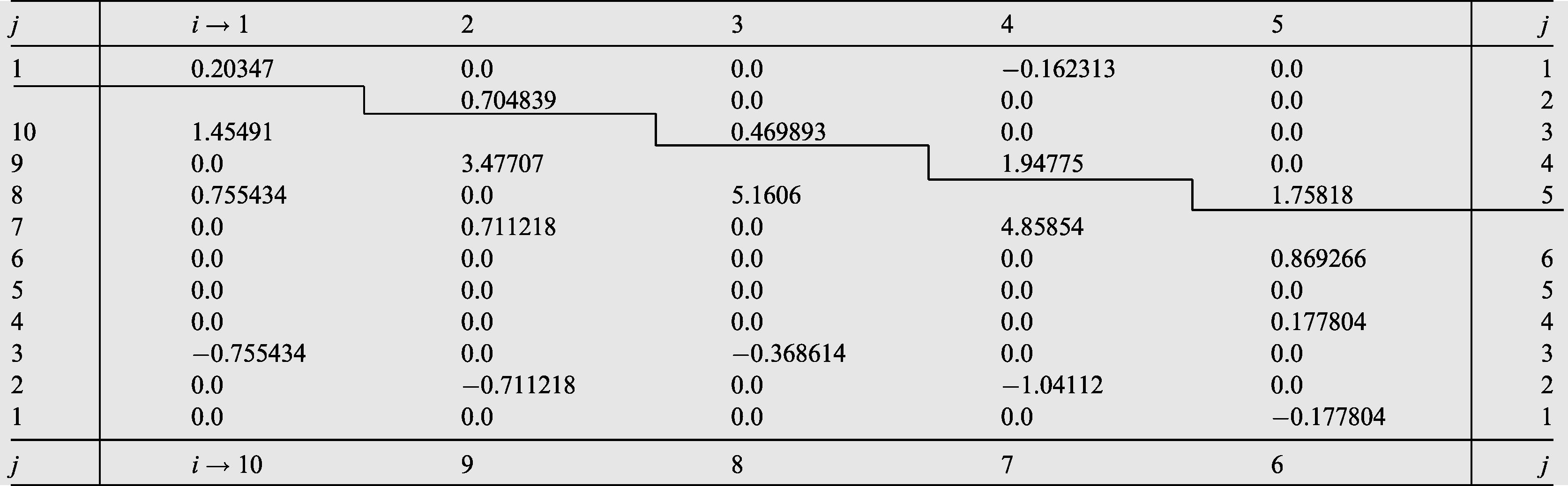
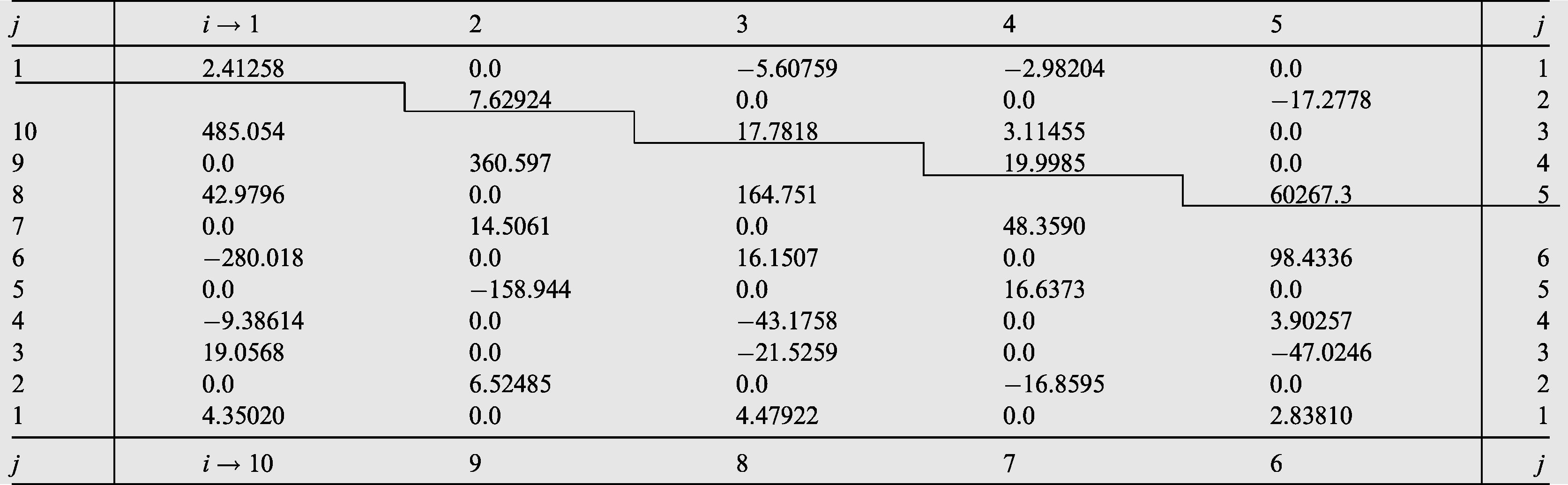
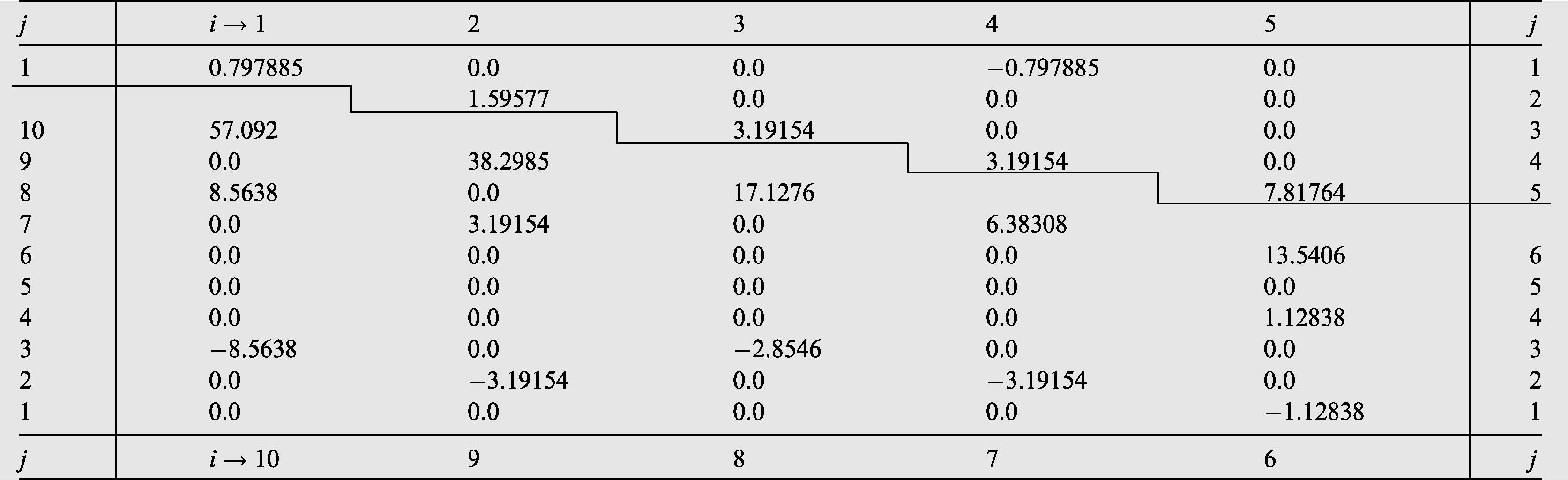
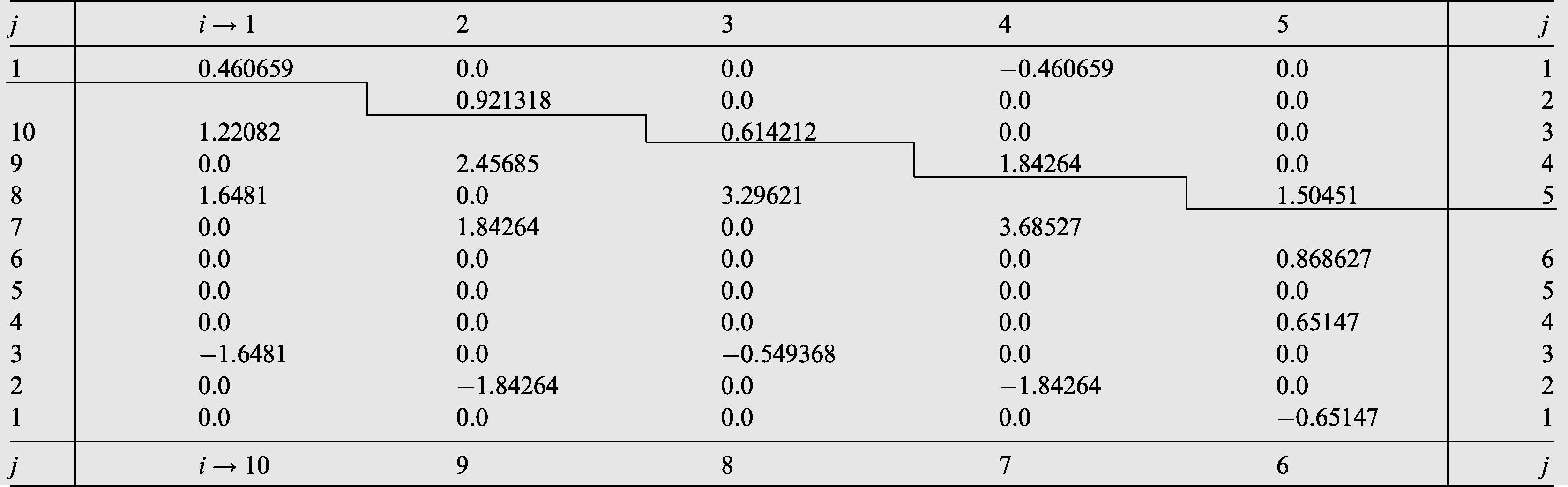
in (8). All the computations have been worked out by using Mathematica 5.2 on a PC. This greatly simplifies and reduces the huge effort spent in preparing lengthy computations and cumbersome programs in any programming high level language. Also one can examine directly and easily the validity of the chosen function u whether it is suitable to our case or not without repeating the hall calculations from the very beginning in case one face any integration problems. Moreover, it enables one to use variation functions other than polynomial variations without fear of the integrals involved (for further work). The coefficients
of the orthonormal polynomials have been computed and reported in Tables 1–4 which correspond to the aspect ratios
and 2.0, respectively, for CC-elliptical plate. Tables 5–8 are for CF-elliptical plate and Tables 9–12 are for FF-elliptical plate. The case
corresponds to a circular plate. It is to be noted that the program can generate results for any value of the aspect ratio
. The approximation order N has been increased from 1 to 28 for CC and FF-cases but from 1 to 10 only in the CF-case. It is a gigantic task to go through approximations beyond this because of the singularities arising in some integrals due to discontinuities at
. If it is necessary the recurrence scheme mentioned in Bhat et al. (1998) is recommended, for further work, which makes the generation of orthogonal polynomials easier and straight forward. For need of space only 10 polynomials have been reported in all cases. The tabulated coefficients have been computed once for all and the reader can use these directly without repeating the calculations again and again. As a check on accuracy of the results it has been verified that






BC
Ref.
r
N
CC
Present
0.5
28
27.3776
39.5000
56.3275
69.8841
Hassan (2004)
0.5
36
27.3774
39.4974
55.9757
69.8580
Singh and Chakraverty (1994a)
0.5
36
27.377
39.497
55.985
69.858
Present
1.0
28
10.2158
21.2605
34.8777
39.7733
Hassan (2004)
1.0
36
10.2158
21.2604
34.8770
39.7711
Narita and Leissa (1981)
1.0
36
10.2144
21.2613
34.8808
39.7656
Exact
1.0
10.2158
21.2604
34.8770
39.7711
Present
1.5
28
7.6131
12.6542
18.4388
19.7298
Present
2.0
28
6.8444
9.8748
13.9962
17.4656
CF
Present
0.5
10
6.0249
14.1261
27.2132
27.8854
Hassan (2004)
0.5
10
6.0832
Hassan (2004)
0.5
78
5.9937
13.7321
25.6766
27.6245
Present
1.0
10
3.1552
9.7090
10.4854
19.8298
Hassan (2004)
1.0
10
3.2002
Hassan (2004)
1.0
78
2.8781
8.9854
9.4516
18.4377
Present
1.5
10
2.5092
6.6619
9.4444
11.5434
Present
2.0
10
2.2332
5.4693
8.8450
8.9237
FF
Present
0.5
28
6.67058
10.5478
17.2116
22.3526
Singh and Chakraverty (1994a)
0.5
20
6.6706
10.548
16.923
22.019
Hassan (2004)
0.5
36
6.6706
10.548
16.923
22.019
Present
1.0
28
5.3583
9.0034
12.4645
21.0331
Hassan (2004)
1.0
36
5.3583
9.0031
12.439
—
Exact
1.0
5.3583
9.0031
12.439
20.475
Sato (1973)
1.0
20
5.3583
9.0031
12.439
20.475
*
Present
1.0
28
5.51119
8.89018
12.8811
21.158
*
Sato (1973)
1.0
20
5.5112
8.8899
12.744
20.409
**
Present
1.0
28
5.26205
9.06923
12.2625
21.0775
**
Sato (1973)
1.0
20
5.262
9.0689
12.244
20.513
**
Narita and Leissa (1981)
1.0
36
5.2624
9.0721
12.243
20.512
**
Exact
1.0
5.262
9.0689
12.244
20.513
Present
1.5
28
2.87855
3.54941
7.24836
7.33783
Present
2.0
28
1.66765
2.63694
4.3029
5.58816
CC
CF
FF
N
N
N
6
27.3954
10.217
3
6.0755
3.3499
10
7.39485
5.79655
10
27.3954
10.217
4
6.0753
3.3278
11
6.70475
5.54263
11
27.3792
10.2166
5
6.0753
3.3278
13
6.70268
5.54200
12
27.3792
10.2166
6
6.0607
3.3161
15
6.70264
5.38067
13
27.3782
10.2163
7
6.0607
3.3161
22
6.67388
5.37167
14
27.3782
10.2163
8
6.0260
3.1553
24
6.67208
5.36885
15
27.3776
10.2158
9
6.0260
3.1553
27
6.67067
5.35834
16
27.3776
10.2158
10
6.0249
3.1552
28
6.67058
5.35834
5 Mode shapes
Fig. 1a–f depict the first six mode shapes and the associated contour lines for a CF-elliptical plate with
and
. Figures corresponding to
are roughly the same. These have been plotted by using tools of Computer Graphics under Turbo C++. The author has prepared his own software for that purpose. Other more figures corresponding to different aspect ratios are available in Hassan (2004).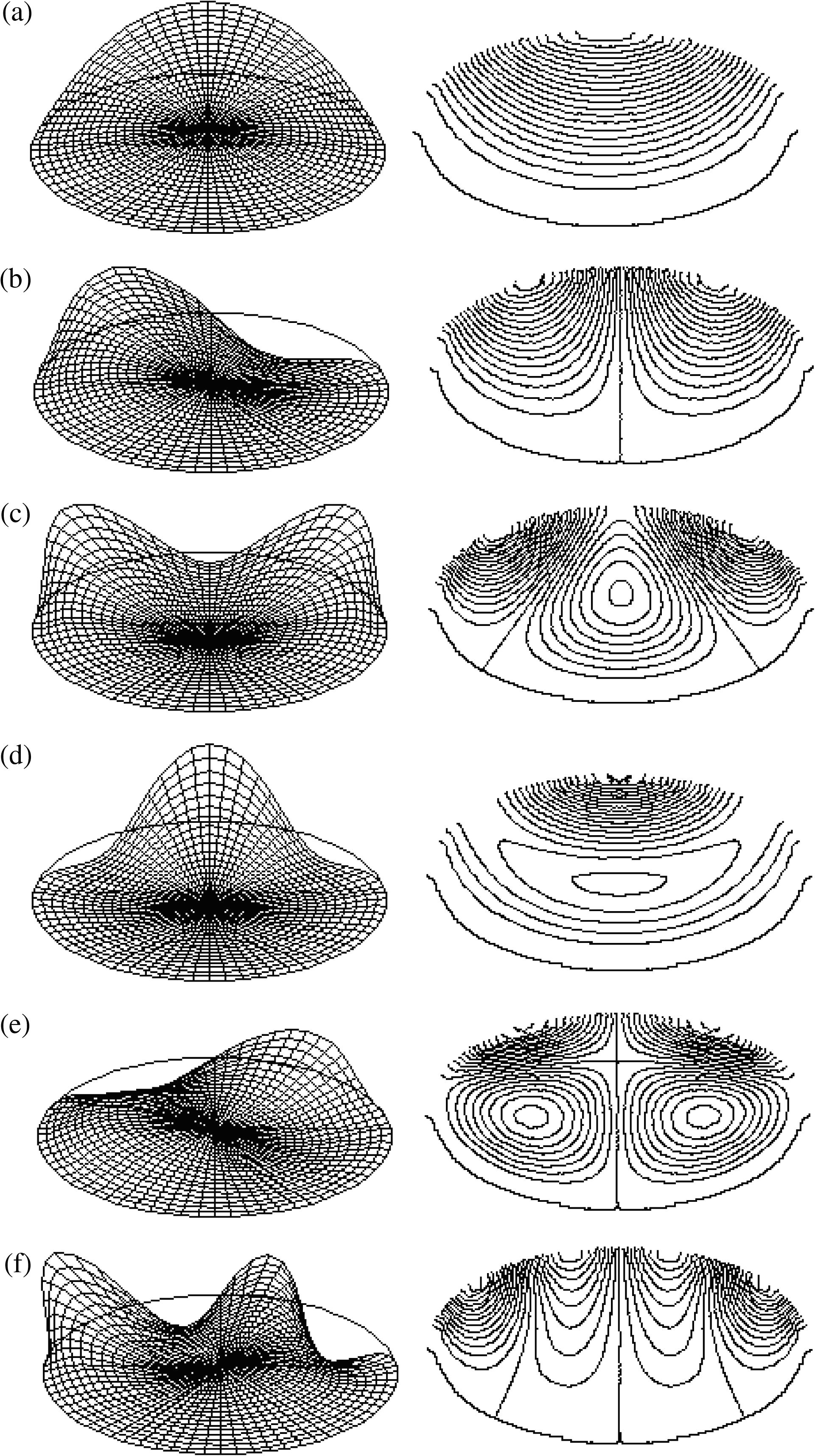
First six mode shapes and the associated contour lines for CF-elliptical plate with
and
.
6 Conclusion
The author has presented a set of orthonormal bases functions that can help in solving numerically the vibration problem of an elliptical plate clamped on lower half of the boundary and free on the upper half. Interested readers can use these directly without repeating the calculations again and again for similar problems. Those polynomials are not only simplifying the calculations but also minimizes the effects of ill-conditioning which frequently occurs with such problems since the resulting eigenvalue problem is no longer the generalized one now.
Acknowledgements
My sincere thanks are due to the Deanship of Scientific Research center, College of Science, King Saud University, Riyadh, KSA, for financial support and providing facilities through the research Project No. (Math/2010/03).
References
- Orthogonal Polynomials for Engineers and Physists. Golem Press; 1973.
- Natural frequencies of rectangular plates using characteristic orthogonal polynomials in Rayleigh–Ritz method. J. Sound Vib.. 1985;102:493-499.
- [Google Scholar]
- Recurrence scheme for the generation of two-dimensional boundary characteristic orthogonal polynomials to study vibration of plates. J. Sound Vib.. 1998;216(2):321-327.
- [Google Scholar]
- Solving the elastic bending problem for a plate with mixed boundary conditions. Int. J. Appl. Mech.. 2006;42(5):582-588.
- [Google Scholar]
- Recent research on vibration of structures using boundary characteristic orthogonal polynomials in the Rayleigh–Ritz method. Shock Vib. Dig.. 1999;13(3):187-194.
- [Google Scholar]
- An Introduction to Orthogonal Polynomials. London: Gordon and Breach; 1978.
- Generalized solutions of mixed problems for first-order partial functional differential equations. Ukrainian Math. J.. 2006;58(6):904-936.
- [Google Scholar]
- Natural frequencies of circular plates with partially free, partially clamped edges. J. Sound Vib.. 1982;84(3):359-370.
- [Google Scholar]
- Applications and computation of orthogonal polynomials. In: Conference at the Mathematical Research Institute Oberwolfach, Germany 22–28. Basel, Switzerland: Birkhauser; 1999.
- [Google Scholar]
- Free transverse vibration of elliptical plates of variable thickness with half of the boundary clamped and the rest free. Int. J. Mech. Sci.. 2004;46:1861-1882.
- [Google Scholar]
- Generating BCOPs to compute natural frequencies of an elliptical plate with half of the boundary simply supported and the rest free. Appl. Math. Inform. Sci. – An Int. J.. 2007;1(2):113-127.
- [Google Scholar]
- Hemmig, F.G., 1975. Investigation of natural frequencies of circular plates with mixed boundary conditions. Air Force Institute of Technology, School of Engineering, Report No. GAE MC/75-11.
- Transverse vibrations and elastic stability of circular plates of variable thickness and with non-uniform boundary conditions. J. Sound Vib.. 1981;77(3):303-310.
- [Google Scholar]
- Leissa, A.W., 1969. Vibration of plates. NASA SP-160. US Government Printing Office, Washington, DC.
- Transverse vibrations of circular plates having non uniform edge constraints. J. Acoust. Soc. Am.. 1979;66(1):180-184.
- [Google Scholar]
- Free vibration analysis of rectangular plates using orthogonal plate functions. Comput. Struct.. 1990;34(1):79-85.
- [Google Scholar]
- Flexural vibrations of free circular plates elastically constrained along parts of the edge. Int. J. Solids Struct.. 1981;17:83-92.
- [Google Scholar]
- Free-flexural vibration of an elliptical plate with free edge. J. Acoust. Soc. Am.. 1973;54:547.
- [Google Scholar]
- Applied Functional Analysis, Numerical methods, Wavelet Methods, and Image Processing. New York, Basel: Marcel Dekker; 2004.
- Transverse vibration of completely-free elliptic and circular plates using orthogonal polynomials in the Rayleigh–Ritz method. Int. J. Mech. Sci.. 1991;33(9):741-751.
- [Google Scholar]
- On the use of orthogonal polynomials in the Ryleigh–Ritz method for the study of transverse vibration of elliptic plates. Comput. Struct.. 1992;43(3):439-444.
- [Google Scholar]
- Transverse vibration of annular circular and elliptic plates using characteristic orthogonal polynomials in two variables. J. Sound Vib.. 1993;160
- [Google Scholar]
- Use of characteristic orthogonal polynomials in two dimensions for transverse vibration of elliptic and circular plates with variable thickness. J. Sound Vib.. 1994;173(3):289-299.
- [Google Scholar]
- Boundary characteristic orthogonal polynomials in numerical approximation. Commun. Numer. Meth. Eng.. 1994;10:1027-1043.
- [Google Scholar]
- Szego, G., 1967. Orthogonal Polynomials, third ed. Am. Math. Soc. Colloq. Publ., vol. 23. Amer. Math. Soc. NY.
- The determination of natural frequencies of rectangular plates with mixed boundary conditions by discrete singular convolution. Int. J. Mech. Sci.. 2001;43:1731-1746.
- [Google Scholar]
- Extension of the meshless approach for the cell method to three-dimensional numerical integration of discrete conservation laws. Int. J. Comput. Meth. Eng. Sci. Mech.. 2006;7(2):69-79.
- [Google Scholar]




