

Translate this page into:
Homotopy analysis method for the fractional nonlinear equations
*Corresponding author. Mobile: +98 9161613979; fax: +98 6612218013 bahman_ghazanfari@yahoo.com (Bahman Ghazanfari)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Available online 21 July 2010
Peer review under responsibility of King Saud University.
Abstract
In this paper, the homotopy analysis method is extended to investigate the numerical solutions of the fractional nonlinear wave equation. The numerical results validate the convergence and accuracy of the homotopy analysis method. Finally, the accuracy properties are demonstrated by some examples.
Keywords
Homotopy analysis method
Nonlinear differential equations
Fractional differential equations

1 Introduction
To find the explicit solutions of nonlinear differential equations, many powerful methods have been used (Abbasbandy, 2006; He, 1998; Wazwaz, 1997; Ghasemi et al., 2007; Adomian and Adomian, 1984). The homotopy analysis method (HAM) (Liao, 2003, 2004; Liao and Tan, 2007; Yamashita et al., 2007) is a general analytic approach to get series solutions of various types of nonlinear equations. The HAM is based on homotopy, a fundamental concept in topology and differential geometry (Sen, 1983).
In recent years, considerable interest in fractional differential equations has been stimulated due to their numerous applications in the areas of physics and engineering (West et al., 2003). Many important phenomena in electromagnetics, acoustics, viscoelasticity, electrochemistry and material science are well described by differential equations of fractional order (West et al., 2003; Podlubny, 1999; Caputo, 1967). Though many exact solutions for linear fractional differential equation had been found, in general, there exists no method that yields an exact solution for nonlinear fractional differential equations.
2 Preliminaries and notations
In this section, let us recall the essentials of fractional calculus first. The fractional calculus is a name for the theory of integrals and derivatives of arbitrary order, which unifies and generalizes the notions of integer-order differentiation and n-fold integration. There are many books (West et al., 2003; Podlubny, 1999) that develop fractional calculus and various definitions of fractional integration and differentiation, such as Riemann–Liouville's definition, Caputo's definition and generalized function approach. For the purpose of this paper the Caputo's definition of fractional differentiation will be used, taking the advantage of Caputo's approach that the initial conditions for fractional differential equations with Caputo's derivatives take on the traditional form as for integer-order differential equations.
Caputo's definition of the fractional-order derivative is defined as
Similar to integer-order differentiation, Caputo's fractional differentiation is a linear operation: where are constants, and satisfies the so-called Leibnitz rule: if is continuous in and has continuous derivatives in .
For n to be the smallest integer that exceeds
, the Caputo space-fractional derivative operator of order
is defined as
For establishing our results, we also necessarily introduce the following Riemann–Liouville fractional integral operator.
A real function , is said to be in the space if there exists a real number , such that , where , and it is said to be in the space iff .
The Riemann–Liouville fractional integral operator of order
, of a function
, is defined as
Properties of the operator
can be found in Podlubny (1999) and we mention only some of them in the following: For
:
Also, we need here two of its basic properties. If
and
, then
For more information on the mathematical properties of fractional derivatives and integrals, one can consult Podlubny (1999).
3 Homotopy analysis method
In this article, we apply the homotopy analysis method to the discussed problem. Let us consider the fractional differential equation:
4 Application
Consider the following two-dimensional nonlinear differential equation of fractional order, with the indicated initial conditions:
Consider the fractional nonlinear wave equation as
Using Eqs. (9), (17), (27) and (28) we have
We still have freedom to choose the auxiliary parameter
. To investigate the influence of
on the solution series, we first consider the convergence of some related series such as
, and
. These curves contain a horizontal line segment. This horizontal line segment denotes the valid region of
which guaranteed the convergence of related series. It is observed the valid region for h is
as shown in Fig. 1. Thus the middle point of this interval. i.e., −1 is an appropriate selection for
in which the numerical solution converges (Ganjiani, 2010). For
-order approximations and
, the approximate solution of u is compared with its exact solution depicted in Fig. 2 for
. Fig. 3 shows the HAM solution (
) with exact solution (
). The approximate solution for
and
is completely matched with the exact solution as shown in Fig. 4.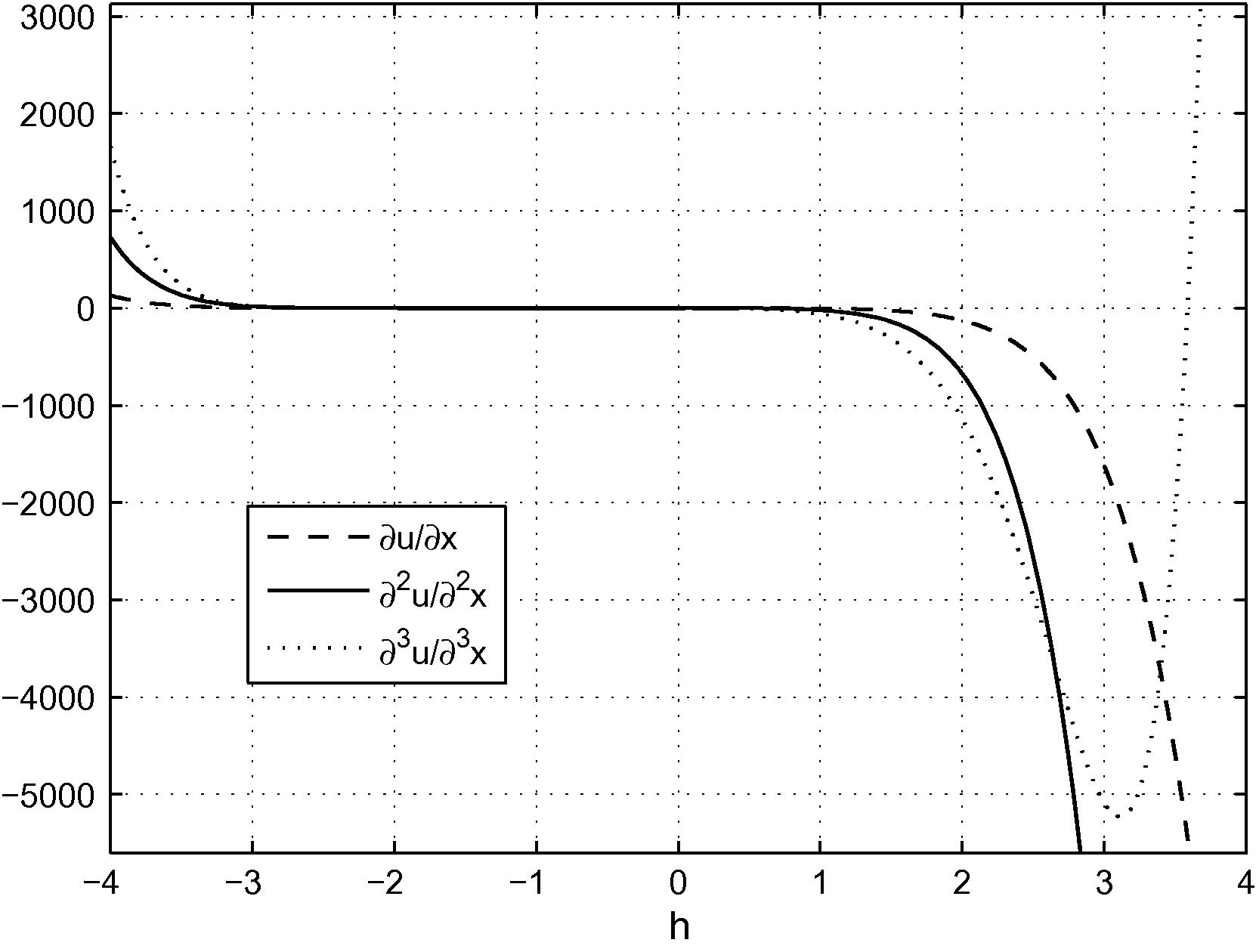
The
-curves at
for
-order approximations.
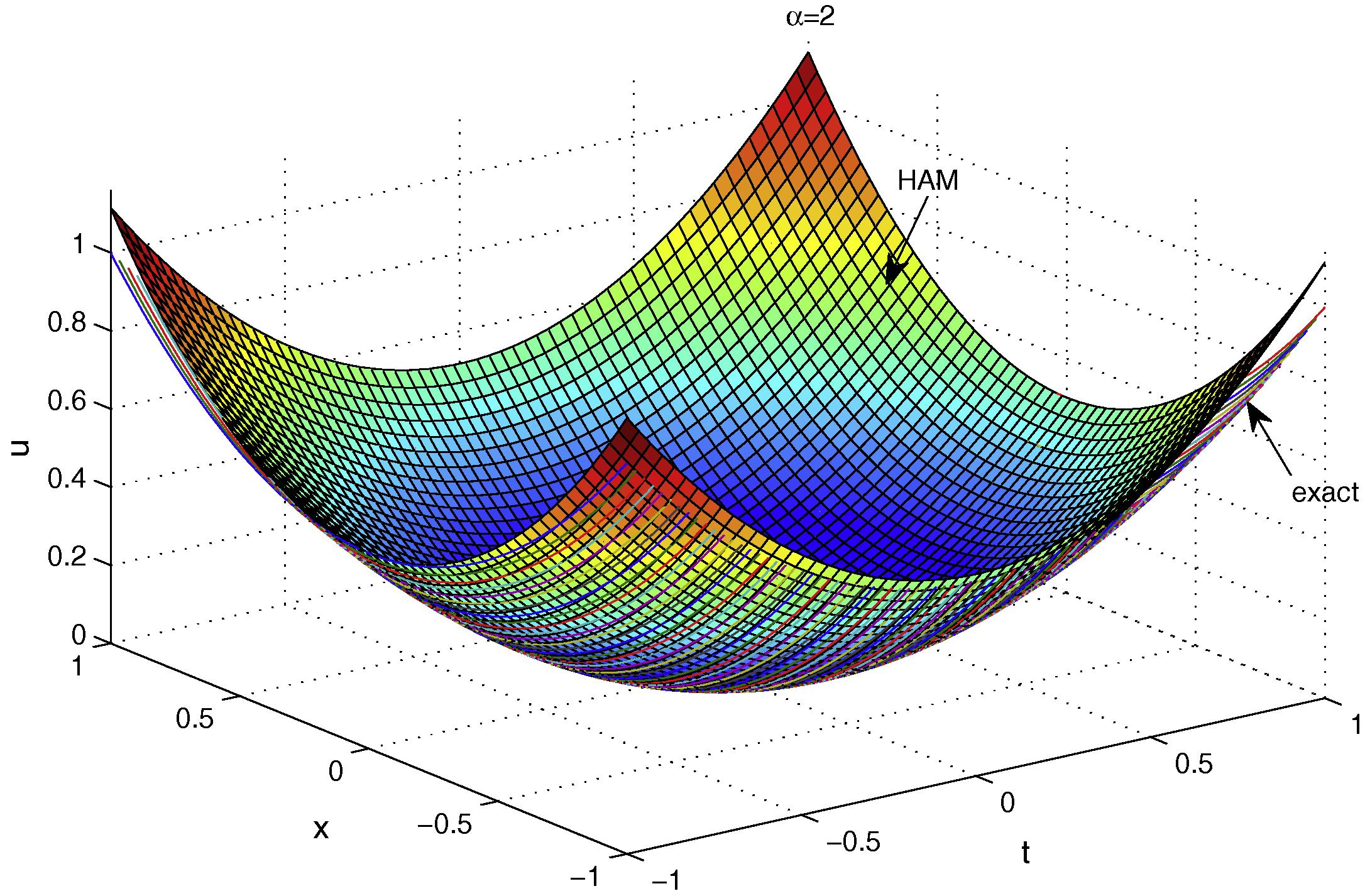
Comparison of HAM solution with the exact solution for
.
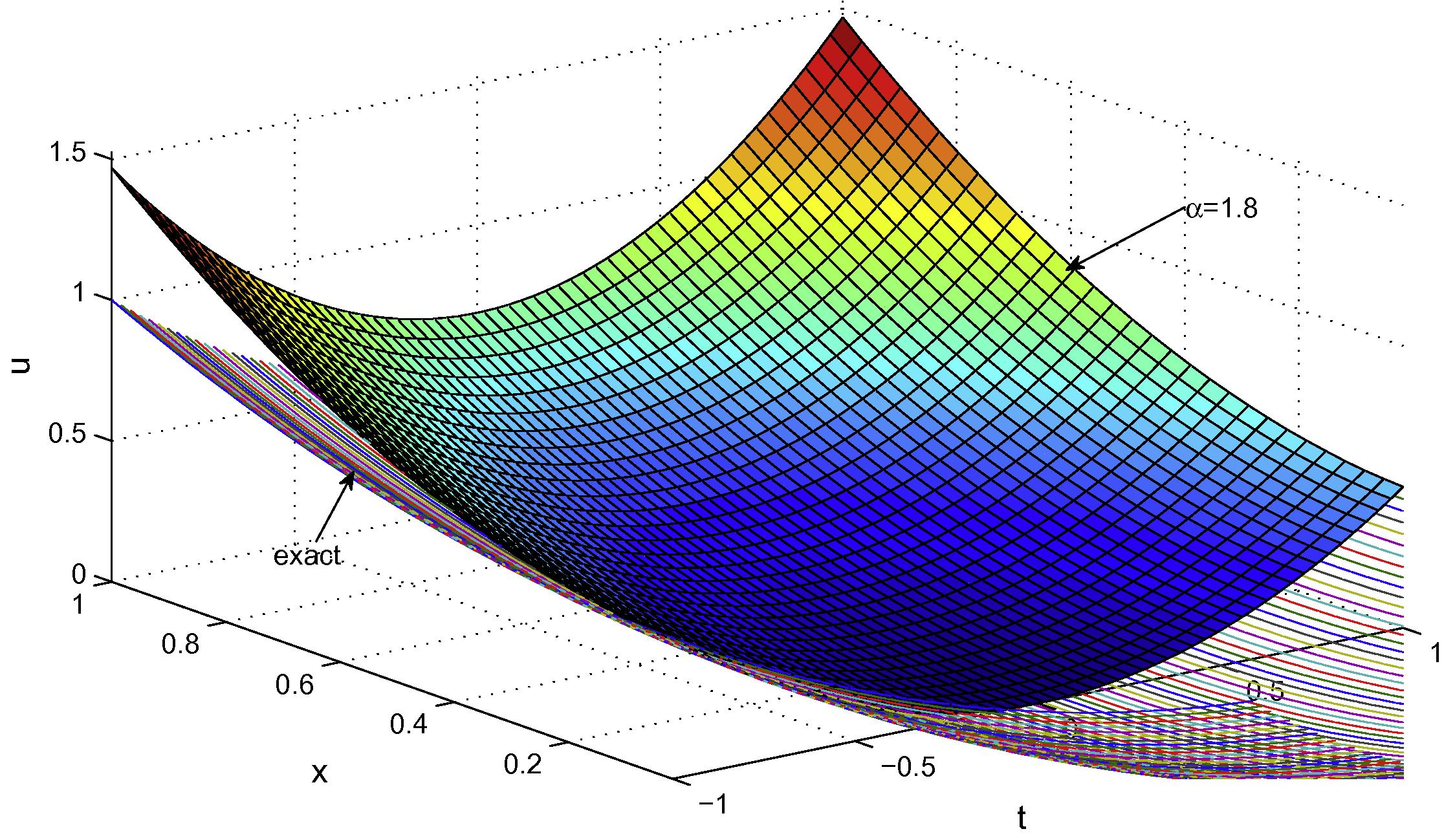
Comparison of HAM solution for
with the exact solution for
.
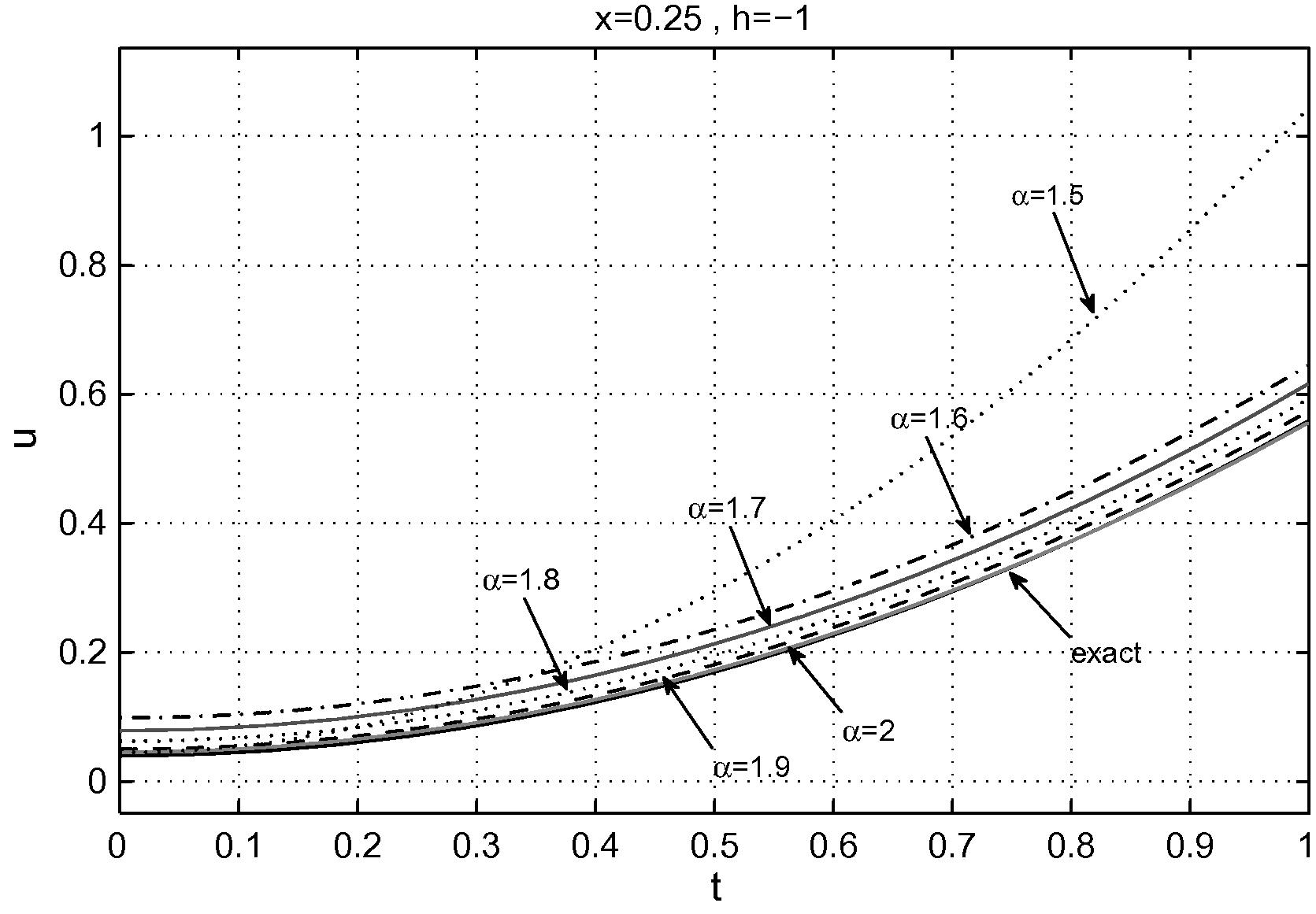
The variation of
-order approximation solution of Eq. (34) with
.
5 Conclusion
In this paper, the homotopy analysis method has been applied for the numerical solutions of the fractional nonlinear wave equation. The results obtained in this work confirm the notion that the HAM is a powerful and efficient technique for finding numerical solutions for fractional nonlinear differential equations which have great significance in different fields of science and engineering.
References
- Iterated He's homotopy perturbation method for quadratic Riccati differential equation. Appl. Math. Comput.. 2006;175:581-589.
- [Google Scholar]
- Linear models of dissipation whose Q is almost frequency independent – Part II. J. R. Astron. Soc.. 1967;13:529-539.
- [Google Scholar]
- Solution of nonlinear fractional differential equations using homotopy analysis method. Appl. Math. Model.. 2010;34:1634-1641.
- [Google Scholar]
- Numerical solution of two-dimensional nonlinear differential equation by homotopy perturbation method. Appl. Math. Comput.. 2007;189:341-345.
- [Google Scholar]
- An approximate solution technique depending upon an artificial parameter. Commun. Nonlinear Sci. Numer. Simul.. 1998;3(2):92-97.
- [Google Scholar]
- Beyond Perturbation: Introduction to the Homotopy Analysis Method. Boca Raton: Chapman & Hall/CRC Press; 2003.
- On the homotopy analysis method for nonlinear problems. Appl. Math. Comput.. 2004;147:499-513.
- [Google Scholar]
- A general approach to obtain series solutions of nonlinear differential equations. Stud. Appl. Math.. 2007;119:297-355.
- [Google Scholar]
- Fractional Differential Equations. San Diego: Academic Press; 1999.
- Topology and Geometry for Physicists. Florida: Academic Press; 1983.
- Necessary conditions for the appearance of noise terms in decomposition solution series. J. Math. Anal. Appl.. 1997;5:265-274.
- [Google Scholar]
- Physics of Fractal Operators. New York: Springer; 2003.
- An analytic solution of projectile motion with the quadratic resistance law using the homotopy analysis method. J. Phys. A. 2007;40:8403-8416.
- [Google Scholar]




