

Translate this page into:
A Liu-Storey-type conjugate gradient method for unconstrained minimization problem with application in motion control
⁎Corresponding author at: Fixed Point Research Laboratory, Fixed Point Theory and Applications Research Group, Center of Excellence in Theoretical and Computational Science (TaCS-CoE), Faculty of Science, King Mongkut’s University of Technology Thonburi (KMUTT), 126 Pracha Uthit Rd., Bang Mod, Thung Khru, Bangkok 10140, Thailand. poom.kum@kmutt.ac.th (Poom Kumam)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Abstract
Conjugate gradient methods have played a vital role in finding the minimizers of large-scale unconstrained optimization problems due to the simplicity of their iteration, convergence properties and their low memory requirements. Based on the Liu-Storey conjugate gradient method, in this paper, we present a Liu-Storey type method for finding the minimizers of large-scale unconstrained optimization problems. The direction of the proposed method is constructed in such a way that the sufficient descent condition is satisfied. Furthermore, we establish the global convergence result of the method under the standard Wolfe and Armijo-like line searches. Numerical findings indicate that our presented approach is efficient and robust in solving large-scale test problems. In addition, an application of the method is explored.
Keywords
65K05
90C52
90C26
Unconstrained optimization
Conjugate gradient method
Line search
Global convergence

1 Introduction
In this paper, we present alternative nonlinear conjugate gradient (CG) method for solving unconstrained optimization problems.
Conjugate gradient methods are preferable among other optimization methods because of low storage requirements (Hager and Zhang, 2006). Based on these, a considerable amount of research articles have been published, most of these articles considered global convergence of the conjugate gradient methods that are previously difficult to globalize (see, for example, Zhang et al., 2006; Gilbert and Nocedal, 1992; Al-Baali, 1985; Dai et al., 2000). In other perspective, some articles considered widening the applicability as well as improving the numerical performance of the existing conjugate gradient methods (see for example Yuan et al., 2019; Yuan et al., 2020; Hager and Zhang, 2013; Ding et al., 2010; Xie et al., 2009; Xie et al., 2010; Abubakar et al., 2021; Abubakar et al., 2021; Malik et al., 2021).
Consider the unconstrained optimization problem
The parameter
is the steplength obtained by either the standard Wolfe line search conditions (Sun and Yuan, 2006), namely,
The scalar is known as the conjugate gradient parameter. Some notable parameters are; the Hestenes-Stiefel (HS) (Hestenes and Stiefel, 1952), Polak-Ribiére-Polyak (PRP) (Polak and Ribiere, 1969; Polyak, 1969) and Liu-Storey (LS) (Liu and Storey, 1991). They are defined as follows: where .
It can be observed that the HS, PRP, and LS method have similarity in their numerator, this similarity makes them have some common features in terms of computational performance. There exists many works on the development of the HS and PRP methods (see, for example, Zhang et al., 2007; Dong et al., 2017; Yu et al., 2008; Saman and Ghanbari, 2014; Andrei, 2011; Yuan et al., 2021), however, as noticed by Hager and Zhang (2006) in their review article, the research on the LS method is rare. Nevertheless, some works on the LS parameter have been presented in the references (Shi and Shen, 2007; Tang et al., 2007; Zhang, 2009; Liu and Feng, 2011; Li and Feng, 2011. In Shi and Shen, 2007; Tang et al., 2007; Liu and Feng, 2011), the authors proposed a new form of Armijo-like line search strategy and used it to investigate the global convergence of the LS method. Zhang (2009), developed a new descent LS-type method based on the memoryless BFGS update and proved the global convergence of the method for general function using the Grippo and Lucidi (1997) line search. Li and Feng (2011), remarked that because of the similarity of the HS, PRP, and LS conjugate parameters, the techniques applied to the HS and PRP can be applied to the LS method to improve its convergence and computational performance. In this regard, Li and Feng, proposed a modification of the LS method similar to the well-known Hager and Zhang CG-DESCENT (Hager and Zhang, 2005).
Noticing the above development, in this paper, we seek another alternative LS-type method following the modifications of the HS and PRP methods by Liang et al. (2015) and Aminifard and Saman (2019), respectively. Motivated by the above proposals and the similarity of the LS CG parameter with HS and PRP parameters, we present an efficient descent LS-type method for nonconvex functions. The direction satisfy the sufficient descent property without any line search requirement and the method is globally convergent under the standard Wolfe line search as well as the Armijo-like line search. The rest of the paper is organized as follows. In Section 2 we provide the algorithm of the descent LS -type method together with its convergence result. In Section 3, we present the numerical experiments, and conclusions are given in Section 4. Unless otherwise stated, throughout this paper we denote .
2 Algorithm and theoretical results
Recently, some proposals have been made to modify the HS and PRP methods. The proposal to modify the HS method was done by Liang et al. (2015) and that to modify the PRP (named as NMPRP method) was done by Aminifard and Saman (2019). In Liang et al. (2015), some CG methods with a descent direction was presented. Moreover, the conjugacy condition given by Dai and Liao (2001) was extended. Likewise in Aminifard and Saman (2019), a descent extension of the PRP method was presented and the global convergence was shown under the Wolfe and Armijo-like line search, respectively. In this section, we build on the analysis given in Liang et al. (2015) and Aminifard and Saman (2019) on the LS method to guarantee a sufficient descent direction (3).
Note that if
, then condition (3) is satisfied when
. Now, our interest is to consider the case where
and the direction satisfies (3). To achieve this, we attach a scaling parameter
to the term
in (2) and propose the following search direction
It is worth noting that if the exact line search is used, the parameter
reduces to
. If
the direction
defined in (7) may not necessarily be descent, in this case we set
. Therefore, we defined the proposed direction by
It can be observed that a restart process for the CG method with direction defined by (7) occur when .
Below we give the algorithm flow framework of the proposed scheme.
Algorithm 1: New Modified LS method (NMLS)
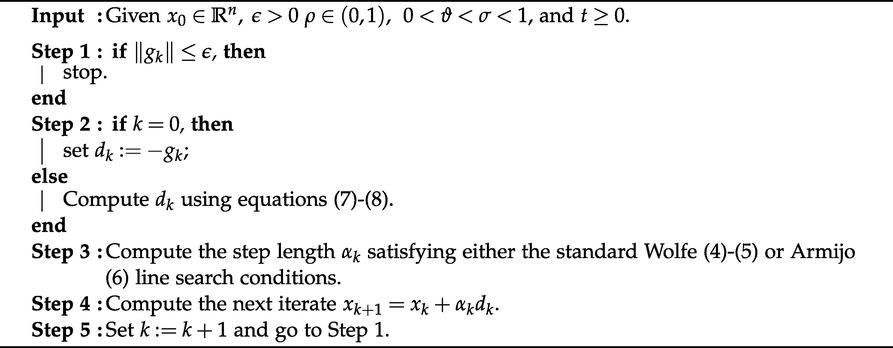
For or , it is easy to see that the sufficient descent condition (3) is satisfied. For , we consider the following two cases:
For , and , then from (7) and (8)
For , we proceed the proof of this case by induction. For , the result follows trivially. Suppose it is true for , that is, . This implies that . Now, we prove it is true for .Since and by induction hypothesis , then from (7) and (8) □
Note that with an exact line search, the CG scheme with the search direction defined by (7) collapses to the LS scheme.
Next, we prove the convergence of Algorithm 1 under the standard Wolfe line search conditions (4)-(5). In addition, we employ the following assumptions.
The level set is bounded.
In some neighborhood
of
, the gradient of the function f is Lipschitz continuous. That is, there exists
such that
Assumptions 2.3 and 2.4 implies that for all there exists such that;
-
.
-
.
-
as is decreasing.
Suppose the inequalities (4) and (5) hold. If
Then
Suppose the conclusion of the theorem is not true, then for some
By Lemma 2.1 together with (4), we have
Likewise, by Lemma 2.1, inequalities (5) and (9),
Joining the above with (4) yield, and
This implies that
Now, inequality (11) with (3) implies that
From (13), we have
The above lead to a contradiction with (12). Thus, (10) holds. □
In what follows, we prove the convergence result of Algorithm 1 under the Armijo-like condition (6).
Since
is nonincreasing, using (6) we have
which further implies that
If
satisfies the Armijo-like condition (6), then
Suppose Eq. (15) does not hold. Then there is
such that
We first show that the search direction satisfies for some , using the following two cases.
and , then from (7), (8) and (3), we have
As from (14), then we can find a and an integer for which and
So, for every ,
Hence, we have where .
and , then from (7) and (8)
Applying same procedure as in
case, then we can find
such that
. If we let
, the
Next, from the Armijo-like line search condition (6), letting
, we must have
By mean value theorem, Cauchy Schwartz inequality and (9), there is
for which
Inequalities (17), (16), (18) and (19) implies
This and (14) gives
From the sufficient descent condition (3), we get
Therefore, we have . This contradicts (16), hence (15) holds. □
3 Numerical examples
This section demonstrates the numerical performance of Algorithm 1. Algorithm 1 is named as NMLS method. Based on the number of iteration (NOI), the number of function evaluations (NOF), and central processing unit (CPU) time, we compare the performance of the NMLS method with the NMPRP method (Aminifard and Saman, 2019). Fifty-six (56) test functions suggested by Andrei (2017) and Jamil (2013) are selected for testing the computational performance of each method. For each test function, we run two problems with different starting points or variation dimensions of 2, 4, 8, 10, 50, 100, 500, 1000, 5000, 10000, 50000 and 100000. The list of test functions is given in Table 1. The algorithm was coded in MATLAB R2019a and compiled on a PC with specification: processor Intel Core i7, operating system Windows 10 pro 64 bit, and 16 GB RAM. We stop the algorithm when
, and the numerical results are said to fail (use “–” to report the failure), if one of the conditions is satisfied: the NOI is more than 10,000 or the problem fail to attained the optimum value.
No
Functions
No
Functions
F1
Extended White and Holst
F29
Extended Quadratic Penalty QP2
F2
Extended Rosenbrock
F30
Extended Quadratic Penalty QP1
F3
Extended Freudenstein and Roth
F31
Quartic
F4
Extended Beale
F32
Matyas
F5
Raydan 1
F33
Colville
F6
Extended Tridiagonal 1
F34
Dixon and Price
F7
Diagonal 4
F35
Sphere
F8
Extended Himmelblau
F36
Sum Squares
F9
FLETCHCR
F37
DENSCHNA
F10
Extended Powel
F38
DENSCHNF
F11
NONSCOMP
F39
Extended Block-Diagonal BD1
F12
Extended DENSCHNB
F40
HIMMELBH
F13
Extended Penalty Function U52
F41
Extended Hiebert
F14
Hager
F42
DQDRTIC
F15
Extended Maratos
F43
ENGVAL1
F16
Six Hump Camel
F44
ENGVAL8
F17
Three Hump Camel
F45
Linear Perturbed
F18
Booth
F46
QUARTICM
F19
Trecanni
F47
DIAG-AUP1
F20
Zettl
F48
ARWHEAD
F21
Shallow
F49
Brent
F22
Generalized Quartic
F50
Deckkers-Aarts
F23
Quadratic QF2
F51
El-Attar-Vidyasagar-Dutta
F24
Leon
F52
Price 4
F25
Generalized Tridiagonal 1
F53
Zirilli or Aluffi-Pentini’s
F26
Generalized Tridiagonal 2
F54
Diagonal Double Border Arrow Up
F27
POWER
F55
HARKERP
F28
Quadratic QF1
F56
Extended Quadratic Penalty QP3
In this section, we compare the proposed NMLS method with NMPRP method using the strong Wolfe and Armijo-like line searches. This is done as a fair comparison adapted to the NMPRP method in Aminifard and Saman (2019). We use the strong Wolfe conditions comprises of (4) and the following stronger version of (5):
To obtain the step-size by using strong Wolfe line search in the NMLS method, the parameters are selected as and . Meanwhile, under the Armijo-like line search, we use the parameters and . For good performance, we choose the parameter for evaluating . In the NMPRP method, we still maintain all the parameter values according to the article (Aminifard and Saman, 2019). All numerical results under the strong Wolfe line search are shown in Table 2 and under Armijo-like line search are given in Table 3. The items in each table have the following meanings: Funct.: the test function, Dim.: dimension, and IP: arbitrary initial points. From the numerical results in Tables 2 and 3, we can see that the NMLS method in this paper is promising.
On the other hand, we use the performance profile introduced by Dolan and Moré (2002) to compare and evaluate the performance of NMLS and the NMPRP methods. The performance profile of each method is depicted by a segment of each problem to obtain a profile curve. From the profile curve, the method that top the curve has the best performance.
Figs. 1–3 present the performance profile with respect to the three metrics; NOI, NOF and CPU time of the two methods, respectively. From Fig. 1a, Fig. 1b, Fig. 2a, Fig. 2b, Fig. 3a, and Fig. 3b, the proposed NMLS method has the best performance based on all metrics under strong Wolfe line search and Armijo-like line search.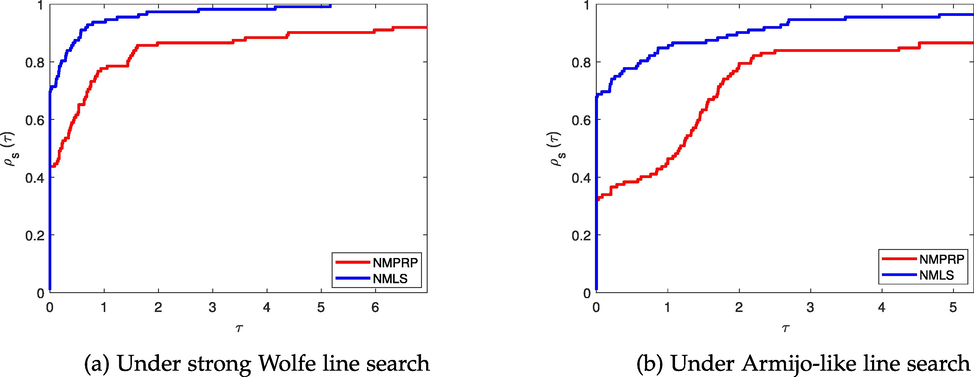
Performance profile based on NOI.
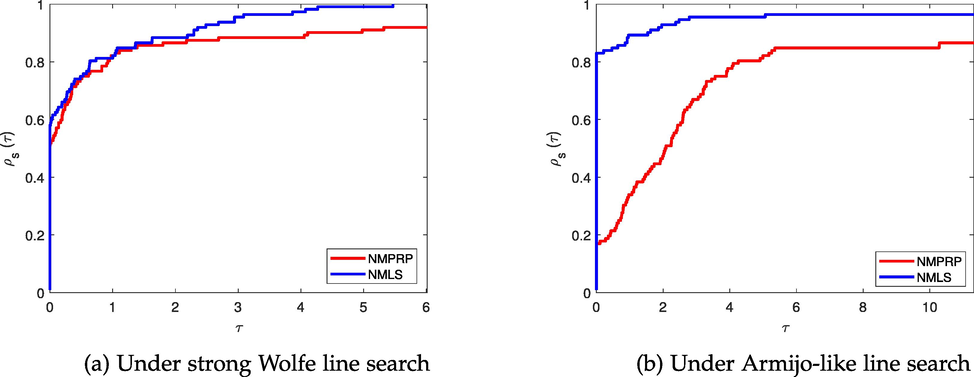
Performance profile based on NOF.
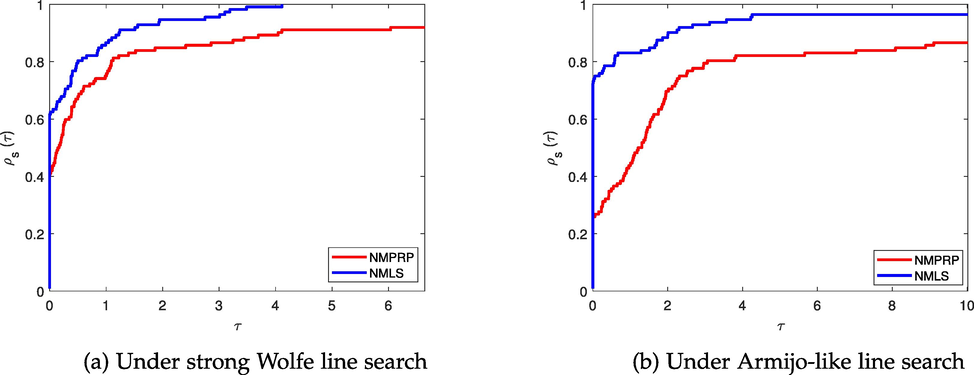
Performance profile based on CPU time.
3.1 Application in motion control
This subsection test the efficiency of Algorithm 1 in solving motion control problem. Algorithm 1 (NMLS method) is implemented using the Armijo-like line search (6), in which we set and . We begin with a brief background on motion control problems (Zhang et al., 2019; Sun et al., 2020). Here we look only at the motion control of two-joint planar robot manipulator. Given the path of the vector desired at time instant , the discrete-time kinematics equation is: finding such that
f is a mapping given by
where
, and
denote the i-th rod length. Obviously, this problem can be described as a minimization problem
For simplicity, we set and the end-effector is controlled to track the following Lissajous curve (Zhang et al., 2019)
The starting point of the initial problem is
, and that of any i-th problem is the approximate solution to the
-th problem (
). Furthermore the time for the task is
, and divided equally into 200 pieces. The outcomes obtained by NMLS are presented in Fig. 4, which shows that NMLS algorithm effectively accomplished the task. More specifically, synthesization of the trajectories of the robot using the NMLS algorithm is plotted in Fig. 4a, and trajectory of end-effector as well as the path desired are plotted in Fig. 4b. Figs. 4c and 4d show the error generated by the NMLS method on x-axis and y-axis, respectively. It is not easy to see the variation of the generated end-effector trajectory and desired path from Fig. 4a and 4b. Actually, Fig. 4c and 4d depict that the errors are not above
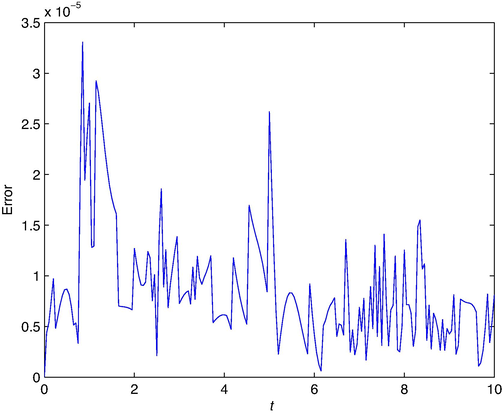
. In addition, to show the absolute error generated by NMLS, we show their Euclidean distance of end-effector trajectory and desired path in Fig. 5, from which we find that the absolute error is always smaller than
. This shows that NMLS completes the task with high precision. In Fig. 4a there is one broken line that is far from other broken lines, which indicates that there is some sudden shift of the manipulator. This may cause damage to the manipulator. Therefore, in addition to the unconstrained optimization model (21), we need to design some new mathematical model of this motion control, which can generate continuous and repetitive motion control. This is one of our further research topics.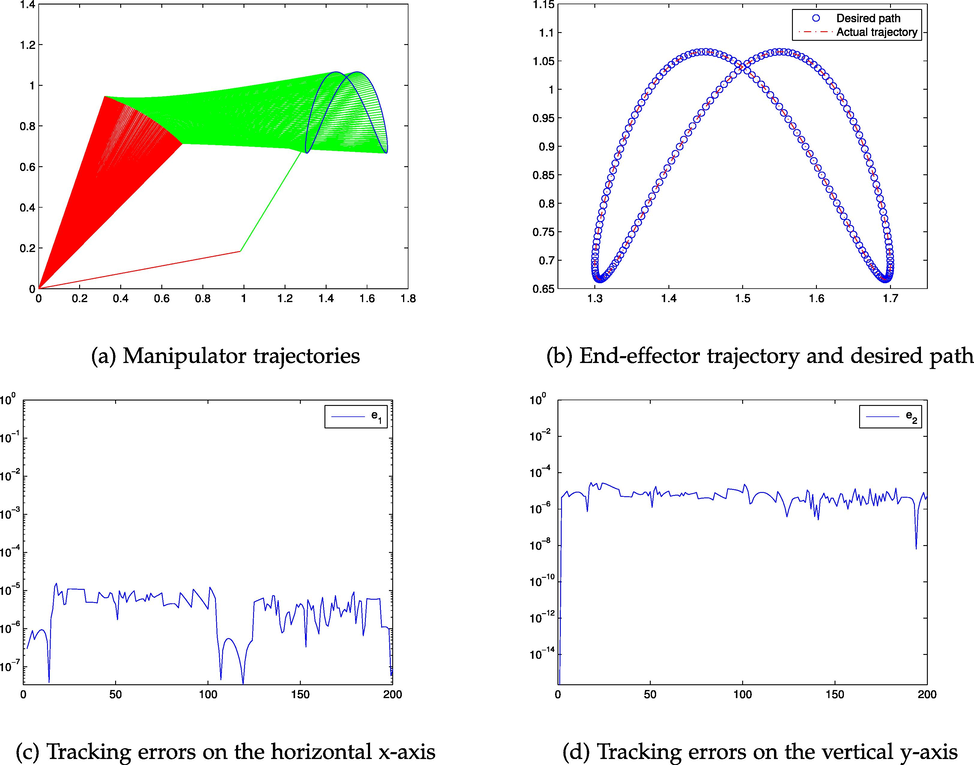
Numerical results generated by NMLS.
Absolute error generated by NMLS.
4 Conclusions
In this article, we have presented a Liu-Storey type conjugate gradient method that guarantees sufficient descent condition independent of the line search. Using the Wolfe and Armijo-like line search conditions, we proved that the NMLS method converges globally. Moreover, the presented method can inherit a built-in self-restarting mechanism of the LS method. Based on our numerical findings, we conclude that the proposed method is the most efficient and promising.
Acknowledgements
The authors acknowledge the financial support provided by the Center of Excellence in Theoretical and Computational Science (TaCS-CoE), KMUTT. Also, the (first) author, (Dr. Auwal Bala Abubakar) would like to thank the Postdoctoral Fellowship from King Mongkut’s University of Technology Thonburi (KMUTT), Thailand. Moreover, this project is funded by National Research Council of Thailand (NRCT) under Research Grants for Talented Mid-Career Researchers (Contract no. N41A640089). Also, the first author acknowledge with thanks, the Department of Mathematics and Applied Mathematics at the Sefako Makgatho Health Sciences University.
References
- A hybrid FR-DY conjugate gradient algorithm for unconstrained optimization with application in portfolio selection. AIMS Math.. 2021;6(6):6506-6527.
- [Google Scholar]
- A hybrid conjugate gradient based approach for solving unconstrained optimization and motion control problems. Math. Comput. Simul. 2021
- [Google Scholar]
- Descent property and global convergence of the Fletcher-Reeves method with inexact line search. IMA J. Numer. Anal.. 1985;5(1):121-124.
- [Google Scholar]
- A modified descent Polak–Ribiére–Polyak conjugate gradient method with global convergence property for nonconvex functions. Calcolo. 2019;56(2):16.
- [Google Scholar]
- Andrei, N., 2011. A modified Polak–Ribière–Polyak conjugate gradient algorithm for unconstrained optimization. Optimization 60(12), 1457–1471.
- Accelerated adaptive perry conjugate gradient algorithms based on the self-scaling memoryless bfgs update. J. Comput. Appl. Math.. 2017;325:149-164.
- [Google Scholar]
- New conjugacy conditions and related nonlinear conjugate gradient methods. Appl. Math. Optim.. 2001;43(1):87-101.
- [Google Scholar]
- Convergence properties of nonlinear conjugate gradient methods. SIAM J. Optim.. 2000;10(2):345-358.
- [Google Scholar]
- Iterative solutions to matrix equations of the form aixbi=fi. Comput. Math. Appl.. 2010;59(11):3500-3507.
- [Google Scholar]
- Benchmarking optimization software with performance profiles. Math. Program.. 2002;91(2):201-213.
- [Google Scholar]
- Some new three-term Hestenes-Stiefel conjugate gradient methods with affine combination. Optimization. 2017;66(5):759-776.
- [Google Scholar]
- Global convergence properties of conjugate gradient methods for optimization. SIAM J. Optim.. 1992;2(1):21-42.
- [Google Scholar]
- globally convergent version of the polak-ribière conjugate gradient method. Math. Program.. 1997;78(3):375-391.
- [Google Scholar]
- A new conjugate gradient method with guaranteed descent and an efficient line search. SIAM J. Optim.. 2005;16(1):170-192.
- [Google Scholar]
- survey of nonlinear conjugate gradient methods. Pacific J. Optim.. 2006;2(1):35-58.
- [Google Scholar]
- The limited memory conjugate gradient method. SIAM J. Optim.. 2013;23(4):2150-2168.
- [Google Scholar]
- Methods of conjugate gradients for solving linear systems. J. Res. Natl. Bureau Standards. 1952;49(6):409-436.
- [Google Scholar]
- A literature survey of benchmark functions for global optimisation problems. Int. J. Math. Model. Numer. Optim.. 2013;4(2):150-194.
- [Google Scholar]
- A sufficient descent LS conjugate gradient method for unconstrained optimization problems. Appl. Math. Comput.. 2011;218(5):1577-1586.
- [Google Scholar]
- A modified Hestenes-Stiefel conjugate gradient method with sufficient descent condition and conjugacy condition. J. Comput. Appl. Math.. 2015;281:239-249.
- [Google Scholar]
- Global convergence of a modified LS nonlinear conjugate gradient method. Proc. Eng.. 2011;15:4357-4361.
- [Google Scholar]
- Efficient generalized conjugate gradient algorithms, part 1: theory. J. Optim. Theory Appl.. 1991;69(1):129-137.
- [Google Scholar]
- Malik, M., Abubakar, A.B., Sulaiman, I.M., Mamat, M., Abas, S.S., Sukono. 2021. A new three-term conjugate gradient method for unconstrained optimization with applications in portfolio selection and robotic motion control. Int. J. Appl. Math. 51(3).
- Note sur la convergence de méthodes de directions conjuguées.Revue française d’informatique et de recherche opérationnelle. Vol 3. Série rouge; 1969. p. :35-43.
- The conjugate gradient method in extremal problems. USSR Computational Mathematics and Mathematical Physics. 1969;9(4):94-112.
- [Google Scholar]
- Saman, B.-K., Ghanbari, R., 2014. A descent extension of the Polak–Ribière–Polyak conjugate gradient method. Comput. Math. Appl. 68(12), 2005–2011.
- Convergence of Liu-Storey conjugate gradient method. Eur. J. Oper. Res.. 2007;182(2):552-560.
- [Google Scholar]
- Sun, W., Yuan, Y. Optimization theory and methods: Nonlinear programming. Springer (992).
- Two improved conjugate gradient methods with application in compressive sensing and motion control. Math. Problems Eng.. 2020;2020
- [Google Scholar]
- G.A new version of the Liu-Storey conjugate gradient method. Appl. Math. Comput.. 2007;189(1):302-313.
- [Google Scholar]
- Gradient based iterative solutions for general linear matrix equations. Comput. Math. Appl.. 2009;58(7):1441-1448.
- [Google Scholar]
- Gradient based and least squares based iterative algorithms for matrix equations axb+cxtd=f. Appl. Math. Comput.. 2010;217(5):2191-2199.
- [Google Scholar]
- The global convergence of the Polak–Ribière–Polyak conjugate gradient algorithm under inexact line search for nonconvex functions. J. Comput. Appl. Math.. 2019;362:262-275.
- [Google Scholar]
- The PRP conjugate gradient algorithm with a modified wwp line search and its application in the image restoration problems. Appl. Numer. Math.. 2020;152:1-11.
- [Google Scholar]
- The modified PRP conjugate gradient algorithm under a non-descent line search and its application in the muskingum model and image restoration problems. Soft. Comput.. 2021;25(8):5867-5879.
- [Google Scholar]
- Global convergence of modified Polak-Ribière-Polyak conjugate gradient methods with sufficient descent property. J. Ind. Manage. Optim.. 2008;4(3):565.
- [Google Scholar]
- Zhang L., 2009. A new Liu–Storey type nonlinear conjugate gradient method for unconstrained optimization problems. J. Comput. Appl. Math. 225(1), 146–157.
- A descent modified Polak–Ribière–Polyak conjugate gradient method and its global convergence. IMA J. Numer. Anal.. 2006;26(4):629-640.
- [Google Scholar]
- Some descent three-term conjugate gradient methods and their global convergence. Optim. Methods Software. 2007;22(4):697-711.
- [Google Scholar]
- General four-step discrete-time zeroing and derivative dynamics applied to time-varying nonlinear optimization. J. Comput. Appl. Math.. 2019;347:314-329.
- [Google Scholar]
Appendix A
See Tables 2 and 3.
Func.
Dim.
IP
NMPRP
NMLS
NOI
NOF
CPU Time
NOI
NOF
CPU Time
F1
50000
(1.1,…,1.1)
27
114
2.1063
10
59
0.9867
F1
100000
(1.1,…,1.1)
27
114
3.8852
10
58
1.9118
F2
50000
(0.1,1,…,0.1,1)
27
133
0.9388
16
75
0.5461
F2
100000
(0.1,1,…,0.1,1)
27
133
1.8728
16
75
1.0683
F3
50000
(0.5,−2,…,0.5,−2)
–
–
–
8
38
0.2869
F3
100000
(0.5,−2,…,0.5,−2)
–
–
–
8
38
0.5809
F4
50000
(1,0.8,…,1,0.8)
16
56
1.0577
10
44
0.8081
F4
100000
(1,0.8,…,1,0.8)
16
56
2.1137
10
44
1.6154
F5
50
(2,…, 2)
66
177
0.0066
82
991
0.0254
F5
100
(2,…,2)
71
216
0.0125
220
1837
0.1142
F6
50000
(−2.1,…,−2.1)
83
217
4.164
8
48
0.7848
F6
100000
(−2.1,…,−2.1)
97
303
11.2897
8
47
1.5565
F7
50000
(0.1,…,0.1)
9
24
0.1955
8
21
0.1716
F7
100000
(0.1,…,0.1)
9
24
0.3747
8
21
0.3468
F8
50000
(5,…,5)
9
40
0.3006
13
103
0.678
F8
100000
(5,…,5)
9
40
0.5847
11
48
0.7318
F9
50000
(−5,…,−5)
39
175
1.222
48
363
2.3116
F9
100000
(−5,…,−5)
37
159
2.2551
55
246
3.3653
F10
50000
(8,…,8)
160
607
11.0454
195
799
14.369
F10
100000
(8,…,8)
245
1103
38.2768
84
421
14.5381
F11
50000
(1.05,…,1.05)
26
81
0.629
41
125
0.9895
F11
100000
(1.05,…,1.05)
30
97
1.5444
39
249
3.3063
F12
50000
(1,…,1)
7
22
0.1765
6
20
0.1677
F12
100000
(1,…,1)
7
22
0.3481
6
20
0.3149
F13
500
(−10,…,−10)
16
120
0.0167
22
152
0.0344
F13
1000
(−10,…,−10)
47
329
0.0638
37
284
0.0629
F14
50
(1.05, …, 1.05)
19
58
0.0018
22
116
0.0053
F14
100
(1.05,…,1.05)
25
76
0.0083
37
347
0.0165
F15
50
(1,…,1)
24
104
0.003
13
68
0.0039
F15
100
(1,…,1)
–
–
–
15
91
0.0095
F16
2
(−1.5,−2)
8
30
4.40E−03
7
28
4.05E−04
F16
2
(−5,−10)
13
70
0.0014
9
45
4.88E−04
F17
2
(−5,−5)
18
66
6.09E−04
18
507
0.0041
F17
2
(5,5)
18
66
0.0011
18
507
0.0026
F18
2
(5,5)
2
6
3.70E−03
2
6
2.86E−04
F18
2
(10,10)
2
6
1.50E−04
2
6
1.49E−04
F19
2
(−1,0.5)
1
3
9.78E−05
1
3
7.70E−05
F19
2
(−5,5)
10
36
5.95E−04
7
74
4.41E−04
F20
2
(0,0)
2
6
7.80E−03
2
6
1.19E−04
F20
2
(−5,5)
25
84
0.0017
14
67
8.19E−04
F21
50000
(1.001,…,1.001)
14
36
0.3292
5
19
0.1546
F21
100000
(1.001,…,1.001)
15
39
0.6534
5
19
0.2997
F22
50000
(1.001,…,1.001)
–
–
–
8
141
0.8757
F22
100000
(1.001,…,1.001)
–
–
–
9
169
1.9728
F23
100
(1.001,…,1.001)
58
176
0.0112
200
2568
0.0903
F23
1000
(1.001,…,1.001)
190
582
0.1224
328
2856
0.4666
F24
2
(−2.5,−2.5)
34
198
0.0016
22
163
0.0016
F24
2
(−8.5,−8.5)
53
429
0.0048
45
412
0.0034
F25
10
(8,…,8)
29
112
0.0033
39
146
0.0038
F25
100
(8,…,8)
37
155
0.0112
40
217
0.0155
F26
50
(8,…,8)
–
–
–
79
532
0.0127
F26
100
(8,…,8)
–
–
–
76
604
0.0388
F27
100
(3,…,3)
143
429
0.0215
146
438
0.0284
F27
1000
(3,…,3)
1574
4722
0.9696
1584
4753
0.9698
F28
1000
(1,…,1)
187
561
0.1345
209
872
0.175
F28
10000
(1,…,1)
606
1818
3.6627
695
2792
5.0326
F29
50
(1,…,1)
22
179
0.0106
29
298
0.0193
F29
500
(1,…,1)
42
401
0.0713
47
510
0.086
F30
50
(2.5,…,2.5)
10
44
0.0019
9
41
0.0023
F30
100
(2.5,…,2.5)
13
72
0.0075
9
61
0.0065
F31
4
(10,10,10,10)
44
222
0.0036
1581
9824
0.0624
F31
4
(100,…,100)
62
346
0.006
1102
6668
0.0515
F32
2
(1,1)
63
252
0.004
1
8
0.0019
F32
2
(20,20)
80
320
0.005
1
8
5.27E−04
F33
4
(1.01,…,1.01)
13
41
0.001
21
201
0.0018
F33
4
(1.05,…,1.05)
31
106
0.0032
63
542
0.0027
F34
10
(2.5,…,2.5)
67
271
0.0065
158
1743
0.0185
F34
100
(2.5,…,2.5)
224
969
0.0445
1494
16304
0.4986
F35
50000
(1,…,1)
1
3
0.0305
1
3
0.0345
F35
100000
(1,…,1)
1
3
0.0629
1
3
0.0534
F36
5000
(−1,…,−1)
435
1305
1.1682
477
1431
1.2797
F36
50000
(−1,…,−1)
1399
4197
32.1167
1578
4778
41.4889
F37
10000
(−1,…,−1)
13
37
0.1518
9
29
0.1121
F37
100000
(−1,…,−1)
13
37
1.2014
8
26
0.8156
F38
5000
(100,…,100)
17
100
0.1517
13
81
0.0767
F38
50000
(100,…,100)
17
100
0.7345
11
75
0.5609
F39
5000
(1.02,…,1.02)
23
72
0.0909
12
78
0.075
F39
50000
(1.02,…,1.02)
23
72
0.7157
13
87
0.7222
F40
50000
(−1,…,−1)
1
3
0.041
1
3
0.0353
F40
100000
(−1,…,−1)
1
3
0.0684
1
3
0.064
F41
50000
(1,…,1)
44
213
1.4846
28
201
1.3216
F41
100000
(1,…,1)
39
208
2.84
28
201
2.6386
F42
100
(2.5,…,2.5)
703
3432
0.1174
245
2457
0.0901
F42
1000
(2.5,…,2.5)
877
4989
0.9623
692
7470
1.3607
F43
10
(1,…,1)
27
85
0.0019
20
263
0.0034
F43
50
(1,…,1)
29
91
0.0056
22
281
0.0131
F44
4
(8,…,8)
321
7917
0.0366
361
9535
0.0483
F44
8
(8,…,8)
344
8358
0.0532
269
7078
0.0449
F45
5000
(2.5,…,2.5)
445
1335
1.1661
479
1573
1.2648
F45
10000
(2.5,…,2.5)
633
1899
3.456
686
2355
4.1385
F46
50000
(4,…,4)
103
847
16.2004
5
51
0.9805
F46
100000
(4,…,4)
105
879
33.5407
5
51
1.9413
F47
100
(4,…,4)
245
3071
0.1165
134
2434
0.0815
F47
500
(4,…,4)
444
5685
0.6422
405
6495
0.7
F48
10
(1.1,…,1.1)
201
3610
0.0173
201
3715
0.0241
F48
50
(1.1,…,1.1)
1044
18579
0.0832
1044
18565
0.0705
F49
2
(1,1)
2
6
2.48E−04
2
6
2.07E−04
F49
2
(8,8)
1
3
2.48E−04
1
3
1.52E−04
F50
2
(1,1)
–
–
–
8
67
8.14E−04
F50
2
(−1,−1)
–
–
–
8
67
8.72E−04
F51
2
(2.5,2.5)
10
50
8.75E−04
10
53
8.20E−04
F51
2
(8,8)
27
170
0.0028
13
91
0.0012
F52
2
(4,4)
15
89
0.002
11
79
9.97E−04
F52
2
(1.5,1.5)
55
222
0.0035
18
103
0.0023
F53
2
(1,1)
10
23
5.97E−04
6
20
3.96E−04
F53
2
(−1,−1)
11
27
3.39E−04
4
11
2.95E−04
F54
500
(0.4,…,0.4)
398
5203
0.5884
327
5272
0.5708
F54
5000
(0.4,…,0.4)
2276
32993
24.4614
577
9468
6.7099
F55
10000
(1,2,…,10000)
27
304
0.4694
24
300
0.4533
F55
50000
(1,2,…,50000)
22
353
2.0584
17
260
1.4967
F56
100
(1,…,1)
21
100
0.0118
31
210
0.0108
F56
1000
(1,…,1)
35
203
0.0527
33
293
0.0549
Func.
Dim.
IP
NMPRP
NMLS
NOI
NOF
CPU Time
NOI
NOF
CPU Time
F1
50000
(1.1,…,1.1)
343
8414
36.5449
125
1014
7.9958
F1
100000
(1.1,…,1.1)
334
8160
69.2095
177
1710
34.4755
F2
50000
(0.1,1,…,0.1,1)
274
6083
5.1683
121
1059
1.9011
F2
100000
(0.1,1,…,0.1,1)
274
6101
14.229
162
1282
5.7396
F3
50000
(0.5,−2,…,0.5,−2)
317
8333
8.125
–
–
–
F3
100000
(0.5,−2,…,0.5,−2)
285
7565
13.0259
–
–
–
F4
50000
(1,0.8,…,1,0.8)
193
2408
20.5074
80
640
5.3248
F4
100000
(1,0.8,…,1,0.8)
190
2420
58.852
165
1290
37.4979
F5
50
(2,…,2)
88
558
0.6429
102
770
0.0127
F5
100
(2,…,2)
145
1217
0.0393
217
2210
0.0353
F6
50000
(−2.1,…,−2.1)
722
1328
57.5115
863
867
31.0011
F6
100000
(−2.1,…,−2.1)
864
1718
154.1461
982
986
148.3827
F7
50000
(0.1,…,0.1)
163
2367
2.7513
91
776
1.3088
F7
100000
(0.1,…,0.1)
160
2282
5.3768
68
537
2.4787
F8
50000
(5,…,5)
143
2406
2.5317
54
385
0.8655
F8
100000
(5,…,5)
146
2456
5.1637
50
402
1.8747
F9
50
(−5,…,−5)
345
8110
0.0266
61
530
0.0057
F9
500
(−5,…,−5)
3015
67319
0.924
160
1760
0.0654
F10
100
(5,…,5)
293
4678
0.0934
1879
24291
0.3753
F10
1000
(5,…,5)
373
5820
0.7372
1899
22603
2.9481
F11
50000
(1.05,…,1.05)
170
2366
3.1738
52
438
0.8185
F11
100000
(1.05,…,1.05)
–
–
–
49
456
1.7689
F12
50000
(1,…,1)
86
635
1.2963
29
58
0.4912
F12
100000
(1,…,1)
81
570
2.5959
29
58
0.902
F13
50
(−10,…,−10)
129
1896
0.0146
55
499
0.0057
F13
100
(−10,…,−10)
132
2282
0.0242
101
778
0.018
F14
50
(1.05,…,1.05)
95
685
0.009
40
313
0.0048
F14
100
(1.05,…,1.05)
128
1052
0.0307
50
332
0.0124
F15
50
(1,…,1)
211
4583
0.0353
222
2895
0.0241
F15
100
(1,…,1)
196
4341
0.0433
246
2503
0.0344
F16
2
(−1.5,−2)
91
856
1.76E−01
31
171
6.46E−04
F16
2
(−5,−10)
85
839
0.0045
19
140
0.0012
F17
2
(−5,−5)
–
–
–
22
153
0.0016
F17
2
(5,5)
–
–
–
22
153
9.63E−04
F18
2
(5,5)
90
783
3.70E−03
33
85
1.10E−03
F18
2
(10,10)
103
912
0.0037
41
105
0.0019
F19
2
(−1,0.5)
42
1169
9.60E−02
21
78
7.35E−04
F19
2
(−5,5)
86
613
0.0049
39
334
0.0028
F20
2
(0,0)
42
335
3.60E−03
16
48
0.0171
F20
2
(−5,5)
60
431
0.0021
174
2401
0.006
F21
50000
(1.001,…,1.001)
61
458
0.9017
53
425
0.7686
F21
100000
(1.001,…,1.001)
64
483
1.779
98
915
2.824
F22
50000
(1.001,…,1.001)
–
–
–
25
51
0.3194
F22
100000
(1.001,…,1.001)
–
–
–
26
53
0.6645
F23
100
(1.001,…,1.001)
128
2640
0.0262
121
1352
0.1293
F23
1000
(1.001,…,1.001)
346
9686
0.1551
444
5068
0.1918
F24
2
(−2.5,−2.5)
248
6066
0.1254
243
2652
0.0091
F24
2
(5,5)
210
5233
0.0132
275
3165
0.0062
F25
10
(8,…,8)
156
2024
0.0145
50
334
0.0047
F25
50
(8,…,8)
174
2333
0.0403
54
444
0.007
F26
50
(8,…,8)
–
–
–
88
558
0.0074
F26
100
(8,…,8)
–
–
–
111
721
0.0141
F27
50
(3,…,3)
542
15491
0.0399
1088
11492
0.0476
F27
100
(3,…,3)
1119
37179
0.1394
1871
22067
0.1567
F28
1000
(1,…,1)
351
8188
0.1416
618
5406
1.2305
F28
10000
(1,…,1)
1141
35261
5.9839
7386
108554
37.9789
F29
50
(1,…,1)
311
10782
0.0308
3486
74335
0.3662
F29
500
(1,…,1)
461
19621
0.2568
378
4864
0.1917
F30
10
(2.5,…,2.5)
132
1572
0.0061
35
261
7.87E−04
F30
50
(2.5,…,2.5)
141
2356
0.0123
36
200
2.35E−01
F31
4
(10,10,10,10)
239
5724
0.022
393
3887
0.0329
F31
4
(100,…,100)
325
8204
0.0209
371
3912
0.021
F32
2
(1,1)
269
269
0.0055
269
269
0.0067
F32
2
(20,20)
342
342
0.0067
342
342
0.0056
F33
4
(1.01,…,1.01)
239
5802
0.0134
60
630
0.0059
F33
4
(1.05,…,1.05)
267
6510
0.0136
54
436
0.0024
F34
10
(2.5,…,2.5)
151
1872
0.0074
131
1067
0.0055
F34
100
(2.5,…,2.5)
677
15030
0.0698
683
4526
0.0581
F35
50000
(1,…,1)
58
1847
1.0773
29
58
0.3573
F35
100000
(1,…,1)
63
2447
2.4575
30
60
0.6896
F36
1000
(−1,…,−1)
404
10324
0.1742
733
7743
0.2627
F36
5000
(−1,…,−1)
855
26517
1.4923
2773
41336
4.8455
F37
10000
(−1,…,−1)
86
601
1.075
24
147
0.2807
F37
100000
(−1,…,−1)
91
660
8.7063
34
251
3.2634
F38
5000
(100,…,100)
167
3485
0.3386
49
369
0.0935
F38
50000
(100,…,100)
180
3727
3.6781
49
380
0.7706
F39
5000
(1.02,…,1.02)
–
–
–
34
211
0.0731
F39
50000
(1.02,…,1.02)
–
–
–
28
168
0.5191
F40
50000
(−1,…,−1)
–
–
–
39
340
0.803
F40
100000
(−1,…,−1)
–
–
–
39
331
1.4508
F41
50
(1,…,1)
–
–
–
2546
26486
0.14
F41
500
(1,…,1)
–
–
–
6631
85547
1.8229
F42
100
(2.5,…,2.5)
254
8876
0.0498
1519
32237
0.1569
F42
1000
(2.5,…,2.5)
264
8837
0.1669
1155
25694
0.6078
F43
10
(1,…,1)
117
1215
0.0056
36
257
0.0027
F43
50
(1,…,1)
120
1228
0.0108
36
251
0.0032
F44
4
(8,…,8)
163
1845
0.0066
50
443
0.0023
F44
8
(8,…,8)
126
1576
0.0056
70
680
0.0031
F45
5000
(2.5,…,2.5)
911
28172
1.7493
3566
54740
5.7253
F45
10000
(2.5,…,2.5)
1319
43903
7.0819
1523
15798
6.044
F46
50000
(2,…,2)
23
2486
20.6921
1
2
0.0436
F46
100000
(2,…,2)
23
2500
39.4022
1
2
0.0713
F47
100
(4,…,4)
116
2750
0.0263
171
2152
0.0273
F47
500
(4,…,4)
123
2900
0.0584
140
1711
0.0594
F48
10
(1.1,…,1.1)
82
1035
0.0067
30
262
0.0025
F48
50
(1.1,…,1.1)
79
1114
0.0077
23
155
9.23E−04
F49
2
(1,1)
51
1534
0.0037
26
51
0.0016
F49
2
(8,8)
56
1873
0.0043
26
52
6.77E−04
F50
2
(1,1)
–
–
–
–
–
–
F50
2
(−1,−1)
–
–
–
–
–
–
F51
2
(2.5,2.5)
135
2608
0.0077
30
152
0.0019
F51
2
(8,8)
156
3088
0.0148
34
184
0.0019
F52
2
(4,4)
137
2918
0.0102
487
5529
0.0249
F52
2
(1.5,1.5)
92
1244
0.0046
2570
41676
0.0856
F53
2
(1,1)
58
2880
0.0063
26
151
0.0017
F53
2
(−1,−1)
37
516
0.002
24
238
0.0012
F54
500
(0.4,…,0.4)
117
2579
0.0506
245
2992
0.0759
F54
5000
(0.4,…,0.4)
133
3089
0.2593
242
2559
0.382
F55
100
(1,2,…,100)
120
1531
0.0217
30
232
0.005
F55
500
(1,2,…,500)
125
2301
0.0566
43
429
0.032
F56
100
(1,…,1)
163
2736
0.031
109
1009
0.022
F56
1000
(1,…,1)
441
12977
0.4352
176
1756
0.0878
Appendix B
Supplementary data
Supplementary data associated with this article can be found, in the online version, at https://doi.org/10.1016/j.jksus.2022.101923.
Supplementary data
The following are the Supplementary data to this article:




