

Translate this page into:
A new numerical scheme for solving pantograph type nonlinear fractional integro-differential equations
⁎Corresponding author. nguyenanhtuan@tdmu.edu.vn (N.A. Tuan)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Abstract
In this work, a general class of pantograph type nonlinear fractional integro-differential equations (PT-FIDEs) with non-singular and non-local kernel is considered. A numerical scheme based on the orthogonal basis functions including the shifted Legendre polynomials (SLPs) is proposed. First, we expand the unknown function and its derivatives in terms of the SLPs with unknown coefficients. Then, we present several theorems based on the SLPs for the help to achieve the approximate solution of the problem under study. Finally, by utilizing these theorems together with the collocation points, the main problem is transformed to a system of linear or nonlinear algebraic equations, which can be simply solved. An investigation for error estimate is discussed. The accuracy and efficiency of the proposed scheme are reported by four illustrative examples.
Keywords
Non-local and non-singular kernel
Volterra nonlinear fractional integro-differential equations
Atangana–Baleanu operator
The shifted Legendre polynomials
Approximation solution
34A08
65M70
11B68

1 Introduction
Fractional calculus is an extension of the classical one which deal with derivatives and integrals of arbitrary real or complex order (Atangana and Hammouch, 2019; Baleanu et al., 2012; Podlubny, 1999; Srivastava et al., 2021; Yang et al., 2020). Fractional derivatives have been widely applied to describing various problems in different fields of applied science. These derivatives are useful in rheology as crucial features of cell rheological behavior (Djordjevic et al., 2003). Recently, the dynamics of coronavirus (2019-nCov) have modeled by with fractional derivative in Khan and Atangana (2020). Since in definition of the most important fractional operators such as Riemann–Liouville (RL) and Caputo exists a kernel of type local and sinqular, it is difficult or impossible to describe many non-local dynamics systems. Hence several definitions for fractional integral and derivative operators have been introduced such as Caputo–Fabrizio (CF) (Caputo and Fabrizio, 2015; Losada and Nieto, 2015), Atangana–Baleanu (AB) (Atangana and Baleanu, 2016) and Yang–Abdel–Aty–Cattani (YAAC) (Yang et al., 2019) operators. The most important advantage of these operators is the existence of the non-local and non-sinqular kernel which introduced to describe complex physical problems (Algahtani, 2016; Djida et al., 2017).
In this work, we consider a class of PT-FIDEs of the form
Volterra nonlinear fractional integro-differential equations (V-NFIDEs) appear widely in many fields of science. The class of PV-IDEs is one of the most important classes of V-FIDEs. Many researchers have presented several numerical techniques for solving these equations (Muroya et al., 2003; Rahimkhani et al., 2017; Zhao et al., 2017).
Orthogonal basis functions have been generally used to achieve approximate solution for many problems in various fields of science. Approximation of the solution using these functions is known as a useful tool in solving many classes of equations, numerically, e.g., differential equations (Jafari et al., 2011; Mishra et al., 2016; Sabermahani et al., 2018; Sabermahani et al., 2020; Singh and Srivastava, 2019; Srivastava et al., 2019), partial differential equations (Ait Touchent et al., 2018; Deiveegan et al., 2019; Ganji et al., 2019; Yang et al., 2018; Yang and Tenreiro Machado, 2017; Ziane et al., 2019) and integro-differential equations (Ganji and Jafari, 2020; Ganji and Jafari, 2019; Nemati et al., 2018; Sedaghat et al., 2014; Nieto and Samet, 2017; Jothimani et al., 2019) of various orders (fixed, fractional or variable order).
The outline of this work is as follows. A brief review of definitions of RL and AB operators and their important properties are presented in Section 2. Section 3 the SLPs with their properties are reviewed. We proposed a numerical scheme for solving problem (1) under the initial condition given by (3) in section (4). In section (5), we discussed about error bound of the proposed scheme. Some illustrative examples are solved in Section 6. In the last section, we conclude the paper.
2 RL and AB operators and their properties
In this section, we first recall many special functions and then bring definitions of (RL and AB)- integral and derivative operators with their properties which will be used further.
Definition 1 See Podlubny (1999)
The Beta and Mittag–Leffler functions are defined, respectively, by
Definition 2 See Podlubny (1999)
The order RL-integral is given by
The RL-integral of order satisfies the following property
Definition 3 See Atangana and Baleanu (2016), Yang (2019)
Let and be a normalization function such that and for . Then
(1) The ABC-derivative is defined as follows
(4)(2) The AB-integral is given by
(5)
Let
and
, then we can rewrite (5) by
It is easy to report that the AB operators satisfy the following properties (Atangana and Baleanu, 2016; Ganji and Jafari, 2020; Ganji et al., 2020)
Theorem 1 See Tajadodi (2020)
Let . Then, we can rewrite the AB-derivative by
3 The SLPs and their properties
Now, firstly we express some basic properties of the SLPs. After that we explain to approximate a function with SLPs and obtaining OM based on SLPs.
3.1 The SLPs
The explanation of the SLPs on
is
The SLPs
given in (7), could be written the following analytic form
For the SLPs, the orthogonality condition is as follows
For two arbitrary functions in , the inner product and norm are defined, respectively, by
3.2 Approximation of a function
Assume that we can expand
in terms of the SLPs as
We can present z by using a truncated series as
Also, we can approximate the function in terms of the SLPs by where is an matrix which are given by
Suppose and given by (12). Then where is given by with
By substituting
into (8), we get
Now, we approximate the function
in terms of the SLPs by
Now for to , By substituting (14) into (13), leads which completes the proof.
Lemma 2 See Ganji et al. (2020)
The operational matrix (OM) of the product and integration of the vector given by (12) can be approximated, respectively, as where and are given in Ganji et al. (2020).
Suppose given by (12). Then where is given by with
By (12), for
, we have
We expand
in the above equation by using the SLPs. It gives
By putting (16) into (15), we get now the proof is completed.
Suppose . The order AB-integral of a vector given in (12) might be approximated by where is called the OM of the AB-integral based on the SLPs and I is an identity matrix. Also, is called the OM of RL-integral based on the SLPs which is given by with
By applying the AB-integral operator on the vector
yields
Now, we must obtain the OM of RL-integral of order . To do this, we apply the LR-integral operator, , on as
By approximating the function
in terms of the SLPs, we get
In view of (18) and for , we get
Therefore, for
, we can write
4 Numerical scheme
The purpose of this section is to present a numerical scheme for solving Eq. (1) under the initial condition (3). To this aim, we first approximate the function
in terms of the SLPs as
First we apply the
order AB-integral on the both sides of (20) and use the initial condition, we have
By approximating
, (21) is rewritten as
By employing Lemma 1, (23) is approximated as
For approximating the Volterra parts of Eq. (1), we expand
and
using the SLPs as
By utilizing (25), Lemma 2, Theorem 2, and in a similar way (Ganji et al., 2020), we obtain
Substituting (20), (22), (24) and (26) into Eq. (1), leads
Also, by substituting (20) into (25) yields
Finally, by substituting the collocation points into Eqs. (27) and (28), a system of nonlinear equations of the vectors of and is formed. By solving this system, the unknown parameters of the vectors of and are obtained. Finally the approximate solution can be computed by (22).
5 Error estimation
This section deals an estimate for the error of the numerical solution of Eq. (1) with initial condition (3) obtained by the proposed scheme in Section 4.
It is well known in the interval , the Sobolev norm of integer order , is defined by where denotes the kth derivative of z and is a Sobolev space.
Lemma 3 See Canuto et al. (2006)
Let and . Suppose be the truncated Legendre series of z. Then, where and C is a positive constant and does not depend to z and integer M.
Lemma 4 See Ganji et al. (2020)
Let be a function in . Suppose that function is given by for all . Then, for
Suppose and . Let is the obtained approximate solution by the given scheme in Section 4. Then, and where
With the help Lemma 4, we obtain
By definition the proof completes. By similar way, we obtain where
Suppose and satisfies in Theorem 4. Then
By employing Theorems 1 and 4, we get
Suppose , and and satisfy the Lipschitz conditions with the constants and , respectively. Let satisfies in Theorem 4. Then
Suppose and satisfies in Theorems 4, 5 and Lemma 5. Let F satisfies the Lipschitz conditions with the constant L. Then , the error bound of the proposed scheme, is bounded as follows
In view of Eq. (1), we get By employing Theorems 4, 5 and Lemma 5, the proof completes.
6 Numerical results
Now, we solve some illustrative examples to show the accuracy and efficiency of the proposed scheme. The codes were written in Mathematica software. For the difference between the value of the exact and approximate solutions at some selected points, we use the following notations
Consider the following PT-FIDE under the initial condition By applying the proposed scheme, the approximate solution for this problem is computed. By considering , the approximate solution together with the exact solution ( when ) for various values of are illustrated in Fig. 1. Zhao et al. (2017) have solved this problem using the Sinc collocation method (SCM) for getting its approximate solution. Hence, in Table 1, the MAE of obtained by the proposed scheme with those obtained in Zhao et al. (2017) at different choices of M is compared. As seen from Fig. 1 and Table 1, by increasing the number of basis functions the numerical solution converges to the exact one. Also, Table 1 shows the proposed scheme only with a small number of basis functions gives more favorable results than the method given by Zhao et al. (2017).
Consider the following PV-FIDE under the initial condition where is the imaginary error function. The exact solution is given by when . For different values of , in Fig. 2, by setting and , we have reported the obtained numerical results by the proposed scheme at some selected points. Also, by considering , comparison of the absolute error at those selected points with different values M and is shown in Tables 2 and 3.
Consider the following PT-FIDE under the initial condition Zhao et al. (2017) have considered this example and solved it by the SCM to achieve its approximate solution. Hence, in Table 4, the MAE of obtained by the proposed scheme with those obtained in Zhao et al. (2017) at various values of M is compared. Also, by taking , the approximate solution together with the exact solution ( when ) with different choices of are shown in Fig. 3.
Consider the fractional pantograph differential equation under the initial condition
By employing the proposed scheme, we have achieve the approximate solution by setting and plotted the approximate solution along with the exact solution ( when ) at various values of . This problem is solved with different methods given in Muroya et al. (2003), Rahimkhani et al. (2017), Nemati et al. (2018) which include collocation method, operational matrix based on Bernoulli wavelets and hat functions, respectively. By setting and , the results obtained are compared with methods given in Muroya et al. (2003), Rahimkhani et al. (2017), Nemati et al. (2018) at some selected points in Table 5. Table 5 shows the proposed scheme gives more favorable results than the method given by Muroya et al. (2003), Rahimkhani et al. (2017), Nemati et al. (2018). Also, comparison of the absolute error at some selected points with different values is shown in Table 6.
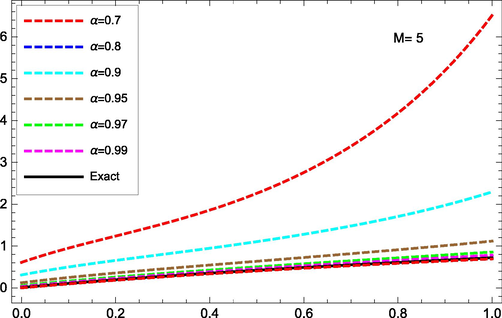
- (Example 1) Approximate solutions for different values of
.
| Method of Zhao et al. (2017) | Present method | ||||
|---|---|---|---|---|---|
| M | MAE | M | MAE | CPU time | |
| 5 | 1.70e−3 | 3 | 9.96e−4 | 0.016 | |
| 10 | 1.11e−4 | 5 | 3.62e−5 | 0.063 | |
| 20 | 1.96e−6 | 7 | 1.57e−6 | 0.156 | |
| 30 | 8.70e−8 | 10 | 5.17e−8 | 0.516 | |
| 40 | 6.26e−9 | 12 | 2.50e−9 | 1.047 |
![(Example 2) The exact and approximate solutions given by different values of α (a) M = 5 and t ∈ [ 0 , 1 ] (b) M = 7 and t ∈ [ 0 , 2 ] .](/content/185/2021/33/1/img/10.1016_j.jksus.2020.08.029-fig2.png)
- (Example 2) The exact and approximate solutions given by different values of
(a)
and
(b)
and
.
| t | |||||
| 0.1 | 1.94e−5 | 1.20e−6 | 1.13e−8 | 2.83e−11 | 1.62e−12 |
| 0.3 | 2.68e−5 | 2.73e−7 | 1.73e−8 | 1.54e−10 | 1.44e−12 |
| 0.5 | 8.38e−5 | 2.25e−6 | 4.61e−9 | 2.82e−10 | 1.19e−12 |
| 0.7 | 1.33e−4 | 1.41e−6 | 2.20e−8 | 6.32e−11 | 2.57e−12 |
| 0.9 | 5.66e−5 | 2.06e−6 | 1.91e−8 | 3.43e−10 | 5.13e−13 |
| t | |||||
| 0.1 | 7.20e−1 | 3.53e−1 | 1.37e−2 | 1.13e−3 | 1.13e−8 |
| 0.3 | 7.28e−1 | 3.34e−1 | 1.22e−2 | 9.58e−3 | 1.73e−8 |
| 0.5 | 6.53e−1 | 2.71e−1 | 8.78e−2 | 6.14e−3 | 4.61e−9 |
| 0.7 | 5.51e−1 | 1.91e−1 | 4.54e−2 | 1.90e−3 | 2.20e−8 |
| 0.9 | 4.51e−1 | 1.08e−1 | 8.75e−5 | 2.66e−3 | 1.91e−8 |
| Method of Zhao et al. (2017) | Present method | ||||
|---|---|---|---|---|---|
| M | MAE | M | MAE | CPU time | |
| 5 | 3.60e−3 | 3 | 2.30e−3 | 0.031 | |
| 10 | 2.23e−4 | 5 | 2.83e−5 | 0.078 | |
| 20 | 5.72e−6 | 7 | 1.20e−7 | 0.406 | |
| 30 | 2.89e−7 | 10 | 4.50e−10 | 1.016 | |
| 40 | 2.21e−8 | 12 | 1.42e−10 | 2.203 |
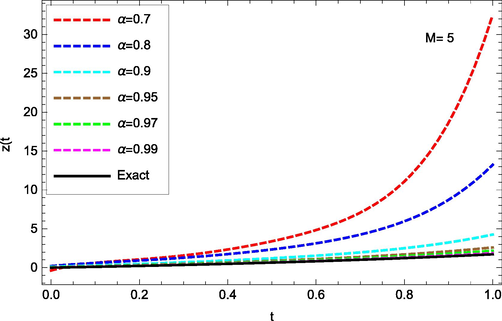
- (Example 3) The exact and approximate solutions given by different values of
.
| Muroya et al. (2003) | Rahimkhani et al. (2017) | Nemati et al. (2018) | Presented method | |
|---|---|---|---|---|
| t | ||||
| t | |||||
| 0.1 | 2.68e−1 | 1.88e−1 | 9.85e−2 | 1.02e−3 | 3.50e−7 |
| 0.3 | 1.95e−1 | 1.39e−1 | 7.38e−2 | 7.75e−3 | 2.61e−7 |
| 0.5 | 1.20e−1 | 8.51e−2 | 4.48e−2 | 4.67e−3 | 2.91e−7 |
| 0.7 | 5.70e−2 | 3.89e−2 | 1.94e−2 | 1.90e−3 | 2.70e−7 |
| 0.9 | 2.22e−3 | 1.31e−3 | 2.80e−3 | 5.38e−4 | 3.73e−7 |
7 Conclusion
In this article, an efficient method has been proposed to obtain numerical solution of pantograph Volterra nonlinear fractional integro-differential equations which is described in the Atangana-Baleanu sense. For solving the considered equations, the properties of the shifted Legendre polynomials together with the collocation points have been used. By this way, the problem under study is reduced to a system of algebraic equations which greatly simplifies the problem. Then, an error estimate is proved for the proposed scheme. Finally, some examples have been presented to show the accuracy and efficiency of the proposed scheme. The numerical results confirm the superiority of this method compared to the other existing state of the art methods. see Fig. 4.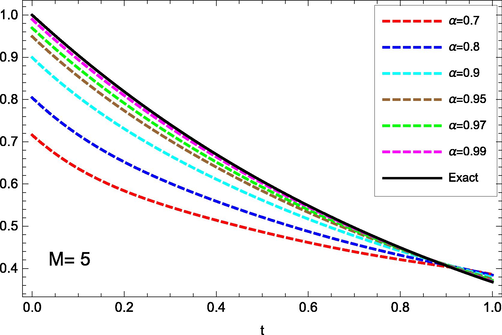
(Example 4) Approximate solutions given by different values of
.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Implementation and convergence analysis of homotopy perturbation coupled with sumudu transform to construct solutions of local-fractional PDEs. Fract. Fraction.. 2018;2(3):22.
- [CrossRef] [Google Scholar]
- Comparing the Atangana-Baleanu and Caputo-Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fract.. 2016;89:552-559.
- [Google Scholar]
- New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci.. 2016;20(2):763-769.
- [Google Scholar]
- Fractional calculus with power law: the cradle of our ancestors. Eur. Phys. J. Plus. 2019;134:429.
- [Google Scholar]
- Chaos in a simple nonlinear system with Atangana-Baleanu derivatives with fractional order. Chaos Solitons Fract.. 2016;89:447-454.
- [Google Scholar]
- Fractional Calculus: Models and Numerical Methods. World Scientific Publishing Company; 2012.
- Spectral Methods, Scientific Computation. Berlin: Springer-Verlag; 2006.
- A new definition of fractional derivative without singular kernel. Prog. Fraction. Different. Appl.. 2015;1(2):73-85.
- [Google Scholar]
- Numerical computation of a fractional derivative with non-local and non-singular kernel. Math. Model. Nat. Phenom.. 2017;12(3):4-13.
- [Google Scholar]
- Fractional derivatives embody essential features of cell rheological behavior. Ann. Biomed. Eng.. 2003;31:692-699.
- [Google Scholar]
- The revised generalized Tikhonov method for the backward time-fractional diffusion equation. J. Appl. Anal. Comput.. 2019;9:45-56.
- [Google Scholar]
- A new approach for solving nonlinear Volterra integro-differential equations with Mittag-Leffler kernel. Proc. Inst. Math. Mech.. 2020;46(1):144-158.
- [Google Scholar]
- A numerical scheme to solve variable order diffusion–wave equations. Therm. Sci.. 2019;23(Suppl. 6):2063-2071.
- [CrossRef] [Google Scholar]
- Numerical solution of variable order integro-differential equations. Adv. Math. Models Appl.. 2019;4(1):64-69.
- [Google Scholar]
- A new approach for solving multi variable orders differential equations with Mittag-Leffler kernel. Chaos Solitons Fract.. 2020;130:109405
- [Google Scholar]
- A new approach for solving integro-differential equations of variable order. J. Comput. Appl. Math.. 2020;379:112946
- [Google Scholar]
- Solving a multi-order fractional differential equation usinghomotopy analysis method. J. King Saud Univ. Sci.. 2011;23(2):151-155.
- [Google Scholar]
- New results on controllability in the framework of fractional integro-differential equations with nondense domain. Eur. Phys. J. Plus. 2019;134:144.
- [Google Scholar]
- Modeling the dynamics of novel coronavirus (2019-nCov) with fractional derivative. Alexand. Eng. J. 2020
- [CrossRef] [Google Scholar]
- Properties of a new fractional derivative without singular kernel. Prog. Fraction. Differ. Appl.. 2015;1(2):87-92.
- [Google Scholar]
- Study of fractional order Van der Pol equation. J. King Saud Univ. Sci.. 2016;28(1):55-60.
- [Google Scholar]
- On the attainable order of collocation methods for pantograph integro-differential equations. J. Comput. Appl. Math.. 2003;152:347-366.
- [Google Scholar]
- An effective numerical method for solving fractional pantograph differential equations using modification of hat functions. Appl. Numer. Math.. 2018;131:174-189.
- [Google Scholar]
- Solvability of an implicit fractional integral equation via a measure of noncompactness argument. Acta Math. Sci.. 2017;37(1):195-204.
- [Google Scholar]
- Fractional Differential Equations. San Diego: Academic Press; 1999.
- A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer. Algor.. 2017;74(1):223-245.
- [Google Scholar]
- Numerical approach based on fractional-order Lagrange polynomials for solving a class of fractional differential equations. Comput. Appl. Math.. 2018;37:3846-3868.
- [Google Scholar]
- Fractional-order Fibonacci-hybrid functions approach for solving fractional delay differential equations. Eng. Comput.. 2020;36:795-806.
- [Google Scholar]
- On spectral method for Volterra functional integro-differential equations of neutral type. Numer. Function. Anal. Optim.. 2014;35(2):223-239.
- [CrossRef] [Google Scholar]
- Jacobi collocation method for the approximate solution of some fractional-order Riccati differential equations with variable coefficients. Phys. A Stat. Mech. Appl.. 2019;523:1130-1149.
- [Google Scholar]
- Special Functions in Fractional Calculus and Related Fractional Differintegral Equations. World Scientific; 2021.
- An application of the Gegenbauer wavelet method for the numerical solution of the fractional Bagley-Torvik Equation. Russ. J. Math. Phys.. 2019;26:77-93.
- [Google Scholar]
- A Numerical approach of fractional advection-diffusion equation with Atangana-Baleanu derivative. Chaos Solitons Fract.. 2020;130:109527
- [Google Scholar]
- General Fractional Derivatives: Theory, Methods and Applications. New York: CRC Press; 2019.
- General Fractional Derivatives with Applications in Viscoelasticity. Academic Press; 2020.
- A new general fractional-order derivative with Rabotnov fractional exponential kernel applied to model the anomalous heat transfer. Therm. Sci.. 2019;23(3A):1677-1681.
- [Google Scholar]
- Fundamental solutions of the general fractional-order diffusion equations. Math. Methods Appl. Sci.. 2018;41(18):9312-9320.
- [Google Scholar]
- A new fractional operator of variable order: application in the description of anomalous diffusion. Phys. A Stat. Mech. Appl.. 2017;481:276-283.
- [Google Scholar]
- Sinc numerical solution for pantograph Volterra delay-integro-differential equation. Int. J. Comput. Math.. 2017;94(5):853-865.
- [Google Scholar]
- Local fractional Sumudu decomposition method for linear partial differential equations with local fractional derivative. J. King Saud Univ. Sci.. 2019;31(1):83-88.
- [Google Scholar]




