Disclaimer: This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Peer review under responsibility of King Saud University.
Abstract
The article is concerned with homotopy in the category whose objects are the pairs consisting of a Polish space X and a closed binary operation . Homomorphisms in are continuous maps compatible with the operations. The result showed that the category admits the structure of a fibration category in the sense of H. Baues. The notions of fibration and weak equivalence are defined in the category and showed to satisfy fundamental properties that the corresponding notions satisfy in the category Top of topological spaces.
Several ubiquitous spaces such as and (where M is a compact manifold), have been studied intensively from many perspectives. However, in the last few decades, they come together as a unified class of metric spaces called Polish spaces. A Polish space is a separable completely metrizable topological space. These spaces are the natural setting for descriptive set theory and its applications. See for instant Kechris (2012), Moschovakis (2009) and Srivastava (2013). In this paper, we focus our attention on the homotopy theory of Polish spaces. In particular, we take the viewpoint of axiomatic homotopy theory.
The definition of Polish spaces depends essentially on topological notions of metrizability and separability which are not preserved by homotopy (Gottlieb, 1964, Theorem 3.1 and Hu, 1961, Section 2). Another observation is that taking subsets of Polish spaces need not yield a Polish space.
Therefore, we impose a mild condition on the category of Polish spaces and continuous maps, Pol, which is the existence of a closed operation. The objects in the new category are the pairs consisting of a Polish space X and an operation defined for each . The homomorphisms in are continuous maps compatible with the operations. Sometimes such an algebra is referred to as a binary groupoid or a magma. However, we will call it a -space here, so we do not confuse it with a completely different approach proposed in Ramsay (1990) named Polish groupoids.
The idea here is that we choose a nice algebraic category endowed with a reasonable notion of homotopy, together with a functor such that if X is homotopic to Y in Pol, then is homotopic to and vice versa, where X and Y could be either objects or morphisms.
In Quillen (1967), Quillen introduced the notion of model category as a framework for axiomatic homotopy theory. A modern theory of Quillen’s homotopical algebra can be found in Dwyer and Spalinski (1995) or Hirschhorn (2003). Baues (Baues, 1989) developed the concept of fibration category and cofibration category. His approach is regarded as doing one half of Quillen’s axioms. These categories satisfy certain axioms that rely on the notions of fibration, cofibration, and weak equivalence.
Baues showed that Top has the structure of a fibration category where fibration means Hurewicz fibration, cofibration means the usual cofibration, and weak equivalence refers to homotopy equivalence. This paper attempts to examine whether the category satisfies the axioms of Baues. Focusing on fibration and regarding the category as a subcategory of Top, it is natural to ask whether the fibration structure of Top restricted to is a fibration category. This question was addressed for different spaces (cf. Andersen and Groda (1997) and Kahl (2009)).
The result showed that the category has the structure of a fibration category (Theorem 6) provided that the fibration means a -fibration, and weak equivalence means a -homotopy equivalence.
We should point out that the techniques used in this paper do not make serious use of deep results from descriptive set theory. The results here depend only on the topological properties of the spaces.
Our main reference for the classical homotopy theory is the book (Hu, 1959). All the spaces in this work are assumed to be separable and completely metrizable.
2
2 The category
Definition 1
A pair is called a -space where X is a separable, completely metrizable space and is a closed operation on X.. A -map between two -spaces is a continuous map that preserves the operations, i.e., for all .
Remark 1
Clearly, the composition of two -maps is a -map. The identity map is a -map for any closed operation on X.
Since the spaces under study are metrizable, (and hence they are Hausdorff and paracompact), the diagonal set is closed in . Therefore the pair is a -space and the set of -maps is the same as the set of continuous maps . Moreover, X is said to have a -diagonal since is -set ((Gruenhage, 2014)).
The two natural projections given by and for all define closed operations that make X into the -space and .
Example 1
The space of continuous maps with the compact-open topology is separable, completely metrizable Kechris, 2012, Theorem 4.19. Then is a -space, where is the composition of maps.
It is known that a subspace of a Polish space need not be a Polish space, it is Polish if and only if it is a in the relative topology (Kechris, 2012, Section 3C).
Definition 2
Let be a -space and let A be a subset of X. Then is a -subspace of provided A is a (in relative topology), and for all .
Henceforth, we shall identify the operation map on the -subspace with that on the original -space.
The category is formed by the -spaces as objects and the -maps as morphisms. The -maps , defines a continuous map . There are two functors can be defined between the categories and Pol:
The functor , such that .
The forgetful functor , such that .
Propostion 1
The categoryis closed under pullbacks.
Proof
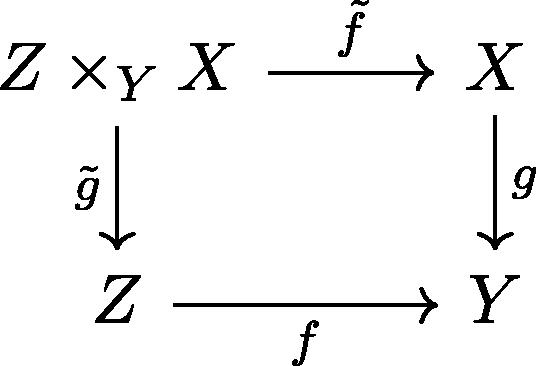
Let and be two -maps. Consider the fiber product space with the operation defined by Then is a space. Indeed, the product of Polish spaces is Polish (Kechris, 2012), and the induced operation on P is closed as a subset of . Consider the diagram in .
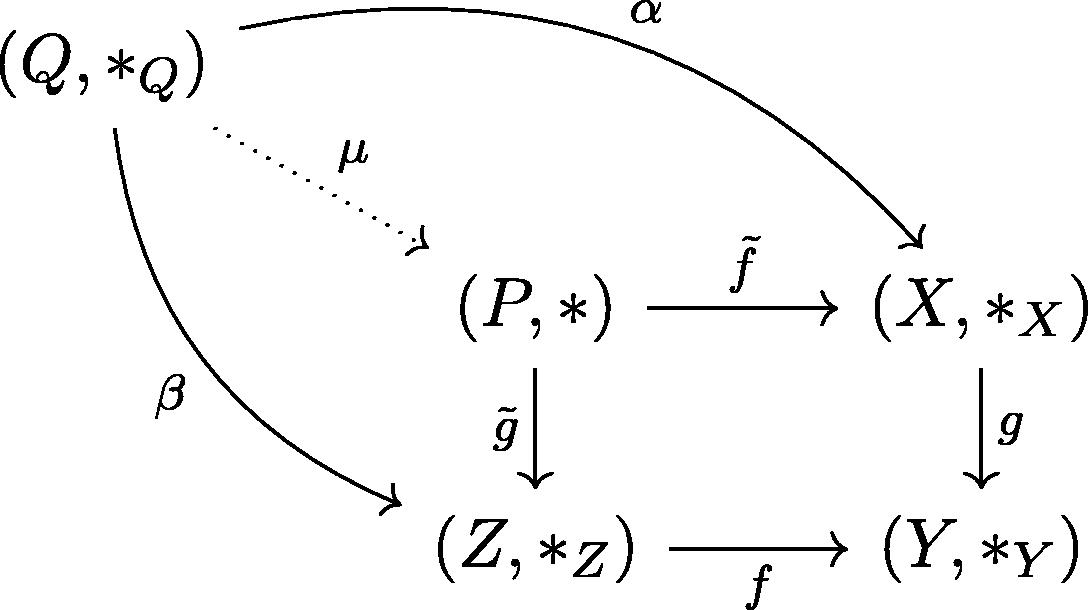
where and are projections, and hence, -maps. To show that has the universal property of the pullback, let be a -space and let and be two -maps such that . Assume that there exists a unique continuous map such that and . To show that is a -map; let . Since the spaces are Polish, and both and are -maps, then there exist neighborhoods U and V of q such that is compatible with the operations on U and is compatible with the operations on V. Since is a neighborhood of q, and since and are compatible with the operations on , then is compatible with the operations on . Therefore is the pullback of g and f in . □
3
3 The -Homotopy
Using the fact that the path space of all continuous maps with the compact-open topology is a Polish space (Example 1). Given a continuous map , such that , for all paths and for all . Obviously, defines a closed operation on and, hence, the pair is a -space.
Now we have the -maps such that . Let a -map be given. The continuous map such that , where is the constant path.Thus is a -map.
Definition 3
Two -maps are said to be -homotopic, (notation: ), if there exists a -map called a -homotopy joining f and g such that for all ; and .
Definition 4
A -map is a -homotopy equivalence if there exists a -map such that and are homotopic to and respectively.
The -homotopy has the standard properties required of a homotopy notion, namely:
Theorem 1
The relationis an equivalence relation.
Letandbe-maps. Ifand, then.
Every invertible-map inis a-homotopy equivalence. Moreover, if two of the-maps, andare-homotopy equivalence, then so is the third.
Proof
(1) symmetry and reflexivity are straightforward. To check transitivity: Let and by -homotopies H and F respectively, and let K be given byThen K is continuous and also a -homotopy between f and h.
(2) Let be a -homotopy joining and . Similarly, let be a -homotopy joining and . DefineThen is a -homotopy joining and .
(3) Follows from the corresponding fact for isomorphisms and from the case of Top category. □
If is a -map, then the -homotopy class consisting of all -maps homotopic to f is denoted by . The set of -homotopy classes of -maps from to is denoted by .
The -homotopy relation defines the homotopy category where the objects are the -spaces and the morphisms are the -homotopy classes of -maps with composition rule . A -map is a -homotopy equivalence if and only if its -homotopy class is an isomorphism in .
Theorem 2
Given two-maps. If f and g are-homotopic, thenare homotopic in Top.
Proof
Since f and g are -homotopic through a -homotopy , then the function defined by for every , is a homotopy between the maps . This is implied by the properties of the compact-open topology on the path space and the Hausdorffness of the Polish spaces. □
The converse of Theorem 2 need not be true, consider the following counter example:
Example 2
Given a -map where is the unit circle with the first projection operation, and is the unit interval with the usual multiplication. Both and are connected Polish spaces. Then, for every . Because f is by definition continuous and the spaces are connected, this implies that the value of is either 0 or 1 and hence, f must be constant. Consequently, there are only two -maps between and . Let and be the constant -maps that send into 0 and 1 respectively. In a similar manner, we can show that there are two -maps between and . The space is Hausdorff with distinct points, whereas is connected. Thus, the -maps and are homotopic but not -homotopic.
The following theorem provides the condition under which the converse of Theorem 2 is true.
Theorem 3
The-maps, are-homotopic if and only if the mapsare homotopic.
Proof
We will prove the case when the projection is . The case of will follow similarly.
For one assertion, assume that is a homotopy joining f and g. To show the existence of a -homotopy between and ; recall that by the definition of we have: . Hence, define a map by for every and every . On the other hand, the assertion that -homotopy implies homotopy is given by Theorem 2.
In the proofs of the last two theorems we applied the fact that for any topological spaces A and B, the map implies the existence of a map defined by for all and ([Strom, 2011]). Since I is compact and regular, then the statement is reversible. □
Remark 2
As a consequence of Theorem 3, it is clear that the functor reflects the homotopy while the functor does not in general.
4
4 The -fibration
Definition 5
A -map is a -fibration with respect to every -space if for a -map and a -homotopy with , there exists a -map such that and for every and every .
Theorem 4
The-mapis a-fibration if and only ifis a Hurewicz fibration.
Proof
Since the definition of fibration and -fibration depend on homotopy and -homotopy respectively, then the result follows easily by applying Theorem 3. □
Lemma 1
Letbe a-fibration. For any-subspaceof. The-mapis a-fibration.
The concept of -lifting function can be defined in the presence of operations as follows. Given a -fibration . Define the space as: , where is the induced operation . Then is Polish because it is a product of Polish spaces, and hence, defines a -space.
Definition 6
A -map is called a -lifting function if:
,
.
Remark 3
The -extension property of -cofibrations is dual to the -lifting property that is used to define -fibrations. However, as the focus of this work is -fibrations and not -cofibrations; -extension property was not found to be of critical importance to the contribution of the paper. This will serve as a topic for further studies in future.
As it was shown by Hurewicz (Hurewicz, 1955), a fibration is regular if it admits a regular lifting function, that is, if has the property that is a constant path whenever is a constant path, then is said to be regular.
Lemma 2
Every-fibration is regular.
Proof
Let be a -fibration. Using the fact that is a normal space and that is a -set (Remark 1), then admits a -function (Tulley, 1965, Theorem 3.1, p.134). Therefore, f is a regular -fibration. □
Next, we verify that -fibrations have the properties usually required of a fibration.
Theorem 5
Every isomorphism of-maps is a-fibration.
The composition of two-fibrations is a-fibration.
Ifis a-fibration andis any-map, then the-mapis a-fibration. Moreover, if g (resp., f) is a-homotopy equivalence, so is(resp.,).
Proof
(1) is obvious.
(2) Given -fibrations and . Let be a -map and let be any -space. Assume that we are given a -map and that is a -homotopy with . Since v is a -fibration, this implies the existence of a -homotopy such that and Since u is a -fibration, then there is a -homotopy such that and . Hence, we have the compositionfor all . This implies that is a -fibration.
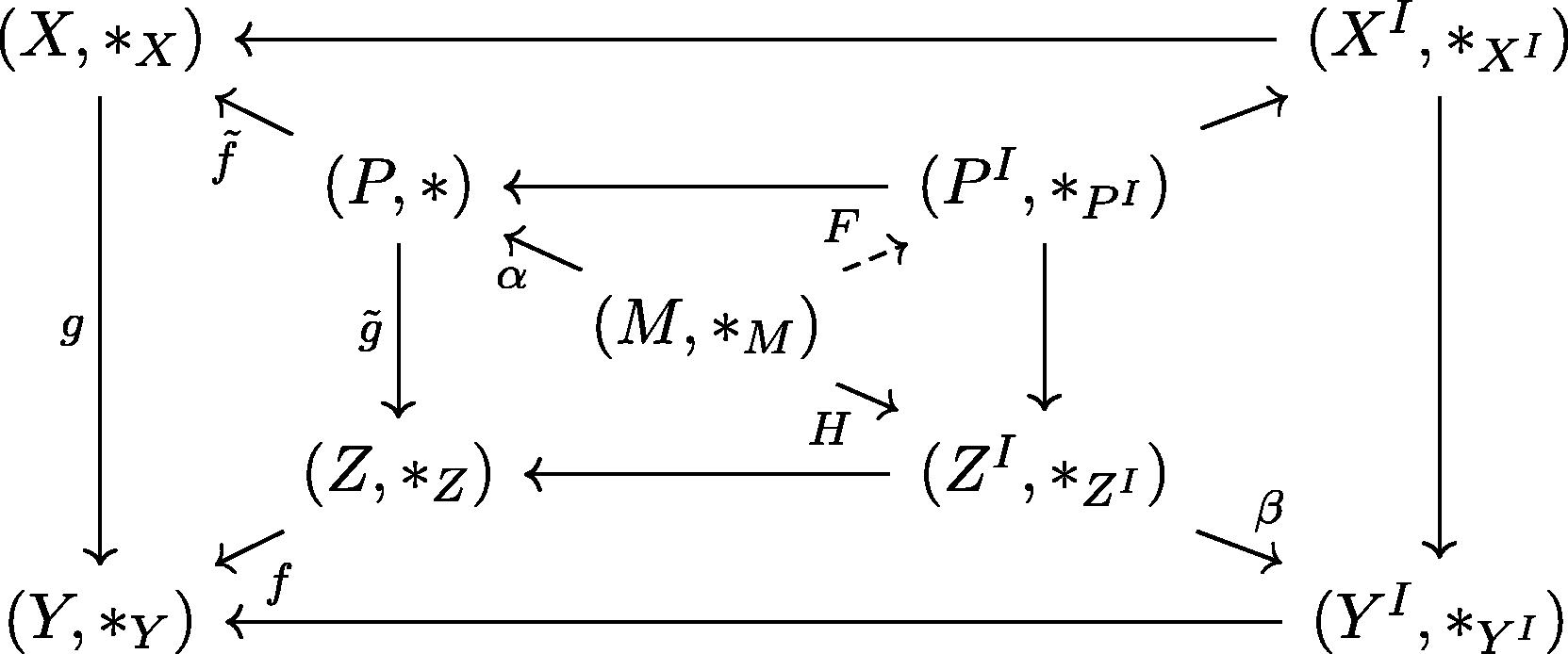
(3) The second assertion follows easily from the Top category case, see e.g. [Baues, 1989]. The proof of the first assertion follows by analyzing the diagram
Given a -homotopy and a -lifting of , i.e., . Then we can find a -homotopy such that the first coordinate is given by H, and the second coordinate is given by the lift of . Since g is a -fibration, this implies that any -homotopy gets lifted to a -homotopy .
Propostion 2
Letbe an arbitrary-map. Then g can be factorized into a-homotopy equivalencefollowed by a-fibration.
Proof
Let be the -space where . To show that f is a -homotopy equivalence; for any point , there is a constant path given by such that . Define f by Now, let be the projection. Then . Let be a -homotopy given bywhere is given by . This implies that . Thus, f is a -homotopy equivalence.
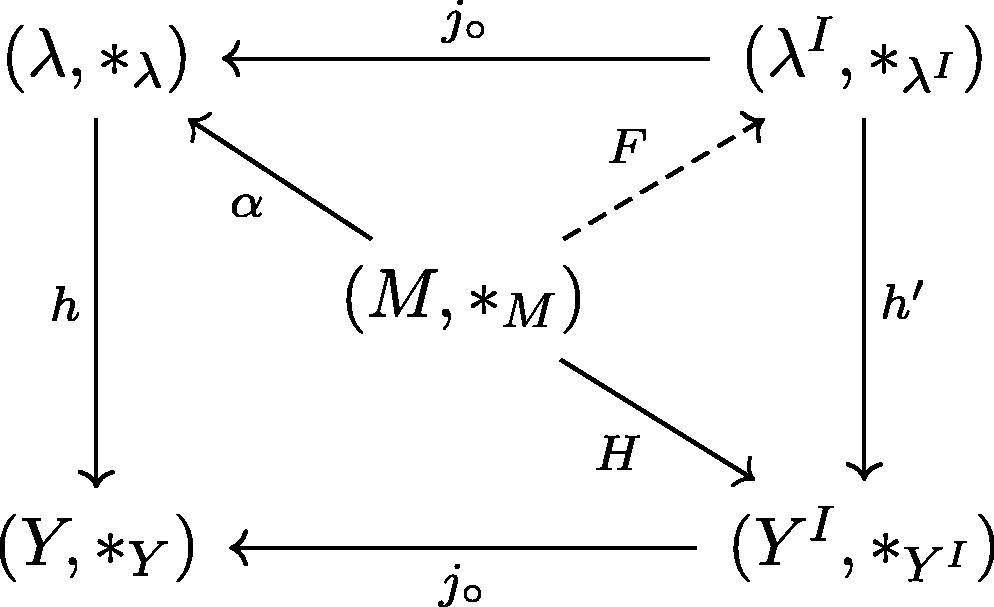
To show that h is a -fibration; consider the following diagram.
where the -maps and H are given such that . We need to construct a lift F of H. Let and letwhere
Then is a -map because its components are all -maps. It follows that h is a -fibration.
By a trivial -fibration we mean a -fibration which is also a -homotopy equivalence.
Propostion 3
If the-mapis a trivial-fibration, then f has a section, i.e., a-mapsuch that.
Proof
Let be the inverse of f such that and . Let H be the homotopy between and . Since f is a -fibration, then there exists a -homotopy such that and . Let such that . Then and hence . □
5
5 Baues fibration category
Using the acquired information from previous sections we can now state and prove our main theorem. First, we recall the definition of fibration category in sense of Baues.
Let fib and . denote classes of morphisms in a category , called fibrations and weak equivalences respectively. A fibration category is a category with the structure that satisfies the following axioms:
(F1) Composition axiom. Isomorphisms are both fibrations and weak equivalences. For two maps in if any two of , and gf are weak equivalences, then so is the third. The composition of fibrations is a fibration.
(F2) Pullback axiom. For a fibration and any map , there exists a pullback diagram in
such that
is a fibration,
if f is a weak equivalence, so is ,
if g is a weak equivalence, so is .
(F3) Factorization axiom. Every map in can be factorized into a weak equivalence f followed by a fibration h such that next diagram commutes.
(F4) Axioms on cofibrant models. For any object Y in there exists a trivial fibration where X is cofibrant in . An object X in is a cofibrant model if every trivial fibration admits a section.
Theorem 6
The categorywith the structureis a fibration category in which all objects are-fibrant and-cofibrant.
Proof
Axiom is proved in Theorem 1(3), Theorem 5(1), and Theorem 5(2). Combining Proposition 1 and Theorem 5(3) yields the proof of axiom . is Proposition 2. follows from Proposition 3 together with the general case of Top. □
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.