

Translate this page into:
Solving two-dimensional integral equations
*Corresponding author. Tel.: +98 1653457893 sousaraie@yahoo.com (A. Sousaraie)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Available online 30 June 2010
Abstract
This paper applies the homotopy analysis method proposed by Liao to obtain approximate analytic solutions for integral equations of two-dimensional. Some examples are presented to show the ability of the method for integral equations of two-dimensional. The results reveal that the method is very effective and simple.
Keywords
Homotopy analysis method
two-dimensional integral equations

1 Introduction
Homotopy analysis method (HAM), first proposed by Liao (1992). HAM properly overcomes restrictions of perturbation techniques because it does not need any small or large parameters to be contained in the problem. Liao, in his book (Liao, 2003a), proves that this method is a generalization of some previously used techniques such as d-expansion method, artificial small parameter method and ADM. This method has proven to be very effective and result in considerable saving in computation time (Liao, 1995, 2003b,c, 2004; Liao and Chwang, 1998; Sami et al., 2008; Abbasbandy, 2007).
2 Analysis of the method
Consider the following linear integral equation of two-dimensional
To illustrate the homotopy analysis method, we consider
Thus, as p increases from 0 to 1, the solution
varies from the initial guesses
to the solution
. Expanding
in Taylor series with respect to p, we have
If the auxiliary linear operator, the initial guess, the auxiliary parameter
, and the auxiliary function are so properly chosen, the series (4) converges at p = 1, then we have
Define the vector
. Differentiating Eq. (2) m times with respect to the embedding parameter p and then setting
and finally dividing them by
, we obtain the mth-order deformation equation
Applying
on both side of Eq. (7), we get
In this way, it is easily to obtain
form
, at Mth-order, we have
When we get an accurate approximation of the original Eq. (1). For the convergence of the above method we refer the reader to Liao (2003a).
3 Numerical example
Consider the following linear Volterra–Fredholm equation
To solve the Eq. (12) by means of homotopy analysis method we choose
We now define a nonlinear operator as
Using above definition, with assumption . We construct the zeroth-order deformation equation obviously, when p = 0 and 1,
Thus, we obtain the mth-order deformation equations
Now, the solution of the mth-order order deformation Eq. (14)
Finally, we have
From Eqs. (13) and (15) and subject to initial condition
We obtain
And by repeating this approach, we obtain
When we have which is an exact solution.
Consider the following Volterra–Fredholm equation
To solve Eq. (16) by means of homotopy analysis method, we have
We now define a nonlinear operator as
Using above definition, with assumption We construct the zeroth-order deformation equations obviously, when p = 0 and 1,
Thus, we obtain the mth-order deformation equations
Now, the solution of the mth-order order deformation Eq. (16)
Finally, we have
From Eqs. (17) and (18) and subject to initial condition
We obtain
When we have
The exact solution and HAM results are shown in Figs. 1 and 2, respectively.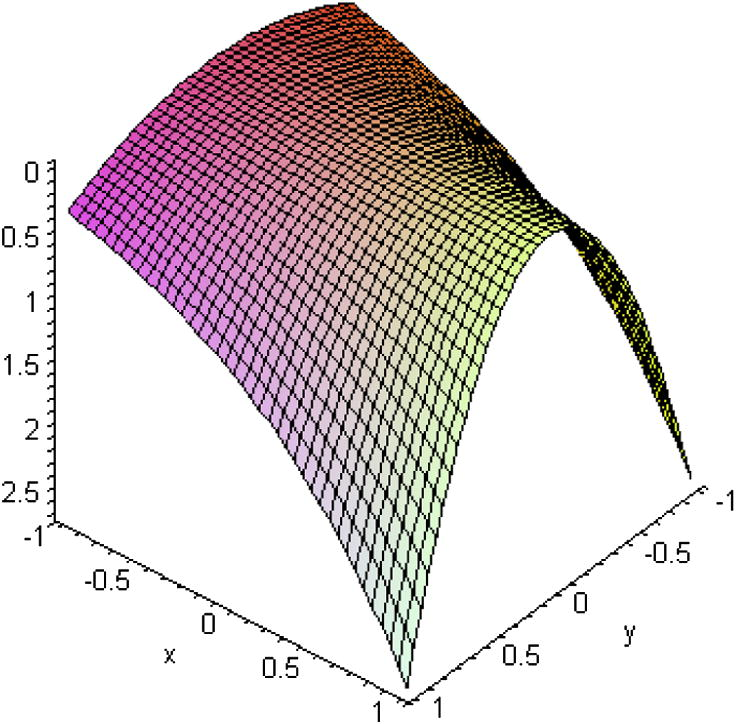
HAM solution for Example 2.
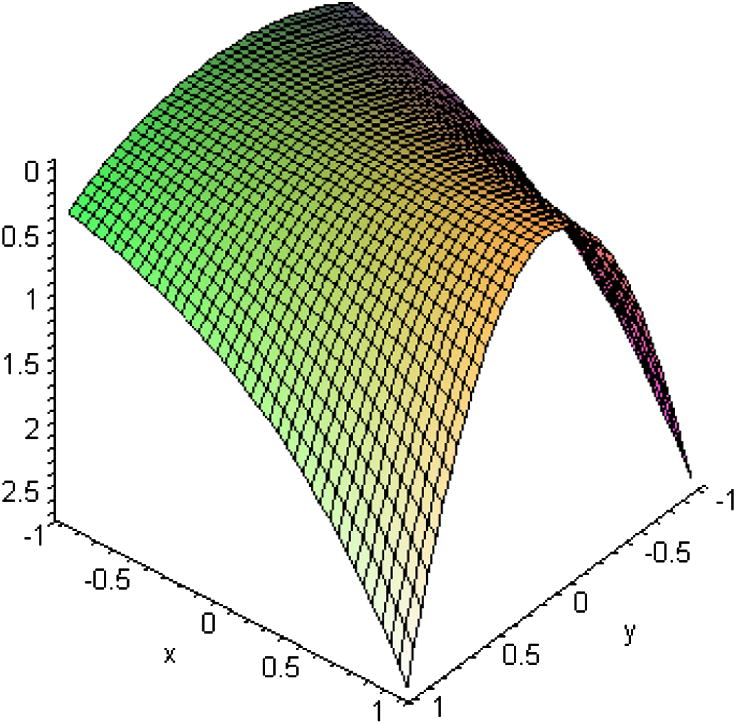
Exact solution for Example 2.
4 Conclusion
In this work we applied homotopy analysis method for solving integral equations of two-dimensional. The approximate solutions obtained by the homotopy analysis method are compared with exact solutions. It can be concluded that the homotopy analysis method is very powerful and efficient technique in finding exact solutions for wide classes of problems. In our work, we use the MAPLE 11 package to carry the computations.
Acknowledgement
With special thank full from Azad university of Gonbad Kavos Branch that this article is resulting from research project Homotopy analysis method for integral equations of mixed type published in this university.
References
- The application of homotopy analysis method to solve a generalized Hirota–Satsuma coupled KdV equation. Phys. Lett. A. 2007;361:478-483.
- [Google Scholar]
- Liao, S.J., 1992. The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems. PhD Thesis, Shanghai Jiao Tong University.
- A kind of approximate solution technique which does not depend upon small parameters: a special example. Int. J. Non-Linear Mech.. 1995;30:371-380.
- [Google Scholar]
- Beyond Perturbation: An Introduction to Homotopy Analysis Method. Boca Raton: Chapman Hall/CRC Press; 2003.
- An analytic approximate technique for free oscillations of positively damped systems with algebraically decaying amplitude. Int. J. Non-Linear Mech.. 2003;38:1173-1183.
- [Google Scholar]
- On the analytic solution of magneto hydrodynamic flows of non-Newtonian fluids over a stretching sheet. J. Fluid Mech.. 2003;488:189-212.
- [Google Scholar]
- On the homotopy analysis method for nonlinear problems. Appl. Math. Comput.. 2004;147:499-513.
- [Google Scholar]
- Application of homotopy analysis method in nonlinear oscillations. ASME J. Appl. Mech.. 1998;65:914-922.
- [Google Scholar]
- Solving systems of ODEs by homotopy analysis method. Commun. Nonlinear Sci. Numer. Simul.. 2008;13:2060-2070.
- [Google Scholar]




