

Translate this page into:
Solution of the fractional epidemic model by homotopy analysis method
*Corresponding author. Address: P.O. Box: Al-Salt 19117, Jordan o.abuarqub@bau.edu.jo (Omar Abu Arqub)
-
Received: ,
Accepted: ,
This article was originally published by Elsevier and was migrated to Scientific Scholar after the change of Publisher.
Available online 8 February 2012
Peer review under responsibility of King Saud University.
Abstract
In this article, we investigate the accuracy of the homotopy analysis method (HAM) for solving the fractional order problem of the spread of a non-fatal disease in a population. The HAM provides us with a simple way to adjust and control the convergence region of the series solution by introducing an auxiliary parameter. Mathematical modeling of the problem leads to a system of nonlinear fractional differential equations. Graphical results are presented and discussed quantitatively to illustrate the solution.
Keywords
Homotopy analysis method
Fractional epidemic model
System of nonlinear differential equations

1 Introduction
Epidemiology is concerned with the spread of disease and its effect on people. This in itself encompasses a range of disciplines, from biology to sociology and philosophy, all of which are utilized to a better understanding and containing of the spread of infection.
One common epidemiological model is the SIR model for the spread of disease, which consists of a system of three differential equations that describe the changes in the number of susceptible, infected, and recovered individuals in a given population. This was introduced as far back as 1927 by Kermack and McKendrick (1927), and despite its simplicity, it is a good model for many infectious diseases. The SIR model is described by the following nonlinear differential system
The SIR model (1) consists of three variables: S(t) is the number of individuals in the susceptible compartment S at time t, in which all individuals are susceptible to the disease; I(t) is the number of individuals in the infected compartment I at time t, in which all individuals are infected by the disease and have infectivity; and R(t) is the number of individuals in the removed (recovered) compartment R at time t, in which all individuals are removed from the infected compartment. This model was made under the following three assumptions:
-
The disease spreads in a closed environment (no emigration and immigration), and there is no birth and death in the population, so the total population remains constant, N, i.e., S(t) + I(t) + R(t) = N.
-
An infected individual is introduced into the susceptible compartment, and contacts sufficient susceptibles at time t, so the number of new infected individuals per unit time is βS(t), where β is the transmission coefficient. The total number of newly infected is βS(t)I(t) at time t.
-
The number removed (recovered) from the infected compartment per unit time is γI(t) at time t, where γ is the rate constant for recovery, corresponding to a mean infection period of γ−1. The recovered have permanent immunity.
In the SIR model considered here, we assume that there is a steady constant rate between susceptible and infectives and that a constant proportion of these constant results in transmission. Also, we ignore any subdivisions of the population by age, sex, mobility, or other factors, although such distinctions are obviously of importance. The reader is asked to refer to (Anderson and May, 1998; Bailey, 1975; Kelleci and Yıldırım, 2011; Murray, 1993; Yildirim and Cherruault, 2009; Yildirim and Koçak, 2011) in order to know more details about mathematical epidemiology, including its history and kinds, basics of SIR epidemic models, method of solutions, etc.
The differential equations with fractional order have recently proved to be valuable tools to the modeling of many real problems in different areas (Luchko and Gorenflo, 1998; Mainardi, 1997; Miller and Ross, 1993; Oldham and Spanier, 1974; Podlubny, 1999). This is because of the fact that the realistic modeling of a physical phenomenon does not depend only on the instant time, but also on the history of the previous time which can also be successfully achieved by using fractional calculus. For example, half-order derivatives and integrals proved to be more useful for the formulation of certain electrochemical problems than the classical models (Luchko and Gorenflo, 1998; Mainardi, 1997; Miller and Ross, 1993; Oldham and Spanier, 1974; Podlubny, 1999). Lately, a large amount of studies developed concerning the application of fractional differential equations in various applications in fluid mechanics, viscoelasticity, biology, physics, and engineering. An excellent account in the study of fractional differential equations can be found in (Kilbas et al., 2006; Lakshmikantham et al., 2009; Podlubny, 1999).
In this work, we study the mathematical behavior of the solution of a fractional SIR model as the order of the fractional derivative changes by extending the classical SIR model (1) to the following fractional SIR model
The reason for considering a fractional order system instead of its integer order counterpart is that the integer order system can be viewed as a special case from the fractional order system by putting the time-fractional order of the derivative equal to unity. Also, using fractional order differential equations can help us to reduce the errors arising from the neglected parameters in modeling real life phenomena (Luchko and Gorenflo, 1998; Miller and Ross, 1993; Podlubny, 1999). Furthermore, the fractional differential equations are innately reference to systems with memory, which stands in most biological systems. Since, the study found that fractional derivative was very suitable to describe long memory and hereditary properties of various materials and processes (Miller and Ross, 1993; Podlubny, 1999).
The HAM, which is proposed by Liao (1992), is effectively and easily used to solve some classes of nonlinear problems without linearization, perturbation, or discretization. In the last years, extensive work has been done using HAM, which provides analytical approximations for nonlinear equations. This method has been implemented in many branches of mathematics and engineering, such as nonlinear water waves (Liao and Cheung, 2003), unsteady boundary-layer flows (Liao, 2006), solitary waves with discontinuity (Wu and Liao, 2005), Klein–Gordon equation (Sun, 2005), fractional KdV-Burgers–Kuramoto equation (Song and Zhang, 2007), fractional nonlinear Riccati equation (Cang et al., 2009), coupled nonlinear diffusion reaction equations and the (2+1)-dimensional Nizhnik–Novikov Veselov system (El-Wakil and Abdou, 2010), Whitham–Broer–Kaup, coupled Korteweg–de Vries, and coupled Burger’s equations (El-Wakil and Abdou, 2008), nonlinear differential difference equations (Abdou, 2010), and others.
The objective of the present paper is to extend the applications of the HAM to provide symbolic approximate solutions for the fractional SIR model (3). As we will see later, choosing suitable values of the auxiliary parameter will help us to adjust and control the convergence region of the series solution.
The organization of this paper is as follows: in the next section, we present some necessary definitions and preliminary results that will be used in our work. In Section 3, the basic idea of the HAM is introduced. In Section 4, we utilize the statement of the method for solving a fractional order SIR model by HAM. In Section 5, numerical results are given to illustrate the capability of HAM. In Section 6, the convergence of the HAM series solution is analyzed. The conclusion is given in the final part, Section 7.
2 Preliminaries
The material in this section is basic in some sense. For the reader’s convenience, we present some necessary definitions from fractional calculus theory and preliminary results. For the concept of fractional derivative, we will adopt Caputo’s definition, which is a modification of the Riemann–Liouville definition and has the advantage of dealing properly with initial value problems in which the initial conditions are given in terms of the field variables and their integer order, which is the case in most physical processes (Caputo, 1967; Luchko and Gorenflo, 1998; Mainardi, 1997; Miller and Ross, 1993; Oldham and Spanier, 1974; Podlubny, 1999).
A real function f(x), x > 0 is said to be in the space if there exists a real number p > μ, such that f(x) = xpf1(x), where f1(x) ∈ C[0, ∞) and it is said to be in the space iff f(n)(x) ∈ Cμ, n ∈ .
The Riemann–Liouville fractional integral operator of order α ⩾ 0, of a function f(x) ∈ Cμ, μ ⩾ −1 is defined as where α > 0 and Γ is the well-known Gamma function.
Properties of the operator Jα can be found in (Caputo, 1967; Luchko and Gorenflo, 1998; Mainardi, 1997; Miller and Ross, 1993; Oldham and Spanier, 1974; Podlubny, 1999), we mention only the following: for f ∈ Cμ, μ ⩾ −1, α, β ⩾ 0, and γ ⩾ −1, we have
The Riemann–Liouville derivative has certain disadvantages when trying to model real-world phenomena with fractional differential equations. Therefore, we shall introduce a modified fractional differential operator proposed by Caputo in his work on the theory of viscoelasticity (Caputo, 1967).
The fractional derivative of in the Caputo sense is defined as: where n ∈ and α is the order of the derivative.
If n − 1 < α ⩽ n, n ∈ , and , then
For mathematical properties of fractional derivatives and integrals, one can consult the mentioned references.
3 Basic idea of the HAM
The principles of the HAM and its applicability for various kinds of differential equations are given in (Cang et al., 2009; Liao, 1992, 1998, 2003, 2004, 2006; Liao and Cheung, 2003; Song and Zhang, 2007; Sun, 2005; Wu and Liao, 2005). For convenience of the reader, we will present a review of the HAM (Liao, 1992, 1998, 2003, 2004, 2006; Liao and Cheung, 2003; Wu and Liao, 2005) then we will implement the HAM to construct a symbolic approximate solution for the fractional SIR model (3) and (2). To achieve our goal, we consider the nonlinear differential equation
Liao (1992) constructs the so-called zeroth-order deformation equation
Thus, according to Eqs. (6) and (7), as q increasing from 0 to 1, the solution ϕ(t; q) varies continuously from the initial approximation y0(t) to the exact solution y(t).
Define the so-called mth-order deformation derivatives
Assume that the auxiliary parameter ℏ, the auxiliary function H(t), the initial approximation y0(t), and the auxiliary linear operator are properly chosen so that the series (9) of ϕ(t; q) converges at q = 1. Then, we have under these assumptions the series solution
According to Eq. (8), the governing equation can be deduced from the zeroth-order deformation Eq. (5). Define the vector
Differentiating Eq. (5) m-times with respect to embedding parameter q, and then setting q = 0 and finally dividing them by m!, we have, using Eq. (8), the so-called mth-order deformation equation
For any given nonlinear operator N, the term can be easily expressed by Eq. (11). Thus, we can gain y0(t), y1(t), y2(t), …, yn(t) by means of solving the linear high-order deformation Eq. (10) one after the other in order. The mth-order approximation of y(t) is given by
It should be emphasized that the so-called mth-order deformation Eq. (10) is linear, which can be easily solved by symbolic computation softwares such as Maple or Mathematica.
4 Solution of the fractional order SIR model by HAM
In this section, we employ our algorithm of the HAM to find out series solutions for the fractional SIR model of epidemics.
Let q ∈ [0, 1] be the so-called embedding parameter. The HAM is based on a kind of continuous mappings such that, as the embedding parameter q increases from 0 to 1, φi(t; q), i = 1, 2, 3 varies from the initial approximation to the exact solution. To ensure this, choose such auxiliary linear operators to be , where 0 < μi ⩽ 1, i = 1, 2, 3.
We define the nonlinear operators Let hi ≠ 0 and Hi(t) ≠ 0, i = 1, 2, 3, denote the so-called auxiliary parameter and auxiliary function, respectively. Using the embedding parameter q, we construct a family of equations subject to the initial conditions
By Taylor’s theorem, we expand φi(t; q), i = 1, 2, 3 by a power series of the embedding parameter q as follows
where
Then at q = 1, the series becomes
For simplicity, we can choose the auxiliary functions as Hi(t) = 1, i = 1, 2, 3 and take , then the right inverse of will be ; the Riemann–Liouville fractional integral operator. Hence, the mth-order deformation Eq. (13) for m ⩾ 1 becomes If we choose S0(t) = S(0) = NS, I0(t) = I(0) = NI, and R0(t) = R(0) = NR as initial guess approximations of S(t), I(t), and R(t), respectively, then two terms approximations for S(t), I(t), and R(t) are calculated and presented below
Finally, we approximate the solution S(t), I(t), and R(t) of the model (3) and (2) by the kth-truncated series
We mention here that, if we set the auxiliary parameters ℏ1 = ℏ2 = ℏ3 = −1 and μ1 = μ2 = μ3 = 1, then the HAM solution is the same as the Adomian decomposition solution obtained in (Biazar, 2006) and the homotopy perturbation solution obtained in (Rafei et al., 2007). Through this paper, we fixed the auxiliary parameters ℏ2 = ℏ3 = −1.
5 Numerical results
The HAM provides an analytical approximate solution in terms of an infinite power series. However, there is a practical need to evaluate this solution, and to obtain numerical values from the infinite power series. The consequent series truncation and the practical procedure are conducted to accomplish this task.
For numerical results, the following values, for parameters, are considered (Biazar, 2006):
Parameter
Description
NS = 20
initial population of NS, who are susceptible
NI = 15
initial population of NI, who are infective
NR = 10
initial population of NR, who are immune
β = 0.01
rate of change of susceptibles to infective population
γ = 0.02
rate of change of infectives to immune population
To consider the behavior of solution for different values of μi, i = 1, 2, 3, we will take advantage of the explicit formula (14) available for 0 < μi ⩽ 1, i = 1,2,3, and consider the following two special cases:
We will examine the classical SIR model (1) and (2) by setting μ1 = μ2 = μ3 = 1 in Eq. (3). The partial sums (14) are determined, and in particular seventh approximations are calculated for S(t), I(t), and R(t), respectively.
In this case we will examine the fractional SIR model (3) and (2) when μ1 = μ2 = μ3 = 0.75. The partial sums (14) are determined, and in particular seventh approximations are calculated for S(t), I(t), and R(t), respectively.
6 Convergence of the series solution
The HAM yields rapidly convergent series solution by using a few iterations. For the convergence of the HAM, the reader is referred to Liao (2003).
According to Rashidi et al. (2011), it is to be noted that the series solution contains the auxiliary parameter ℏ1 which provides a simple way to adjust and control the convergence of the series solution. In fact, it is very important to ensure that the series Eq. (12) are convergent. To this end, we have plotted ℏ1-curves of S′(0), I′(0), and R′(0) by seventh order approximation of the HAM in Figs. 1–3, respectively, for μ1 = μ2 = μ3 = 1 and μ1 = μ2 = μ3 = 0.75.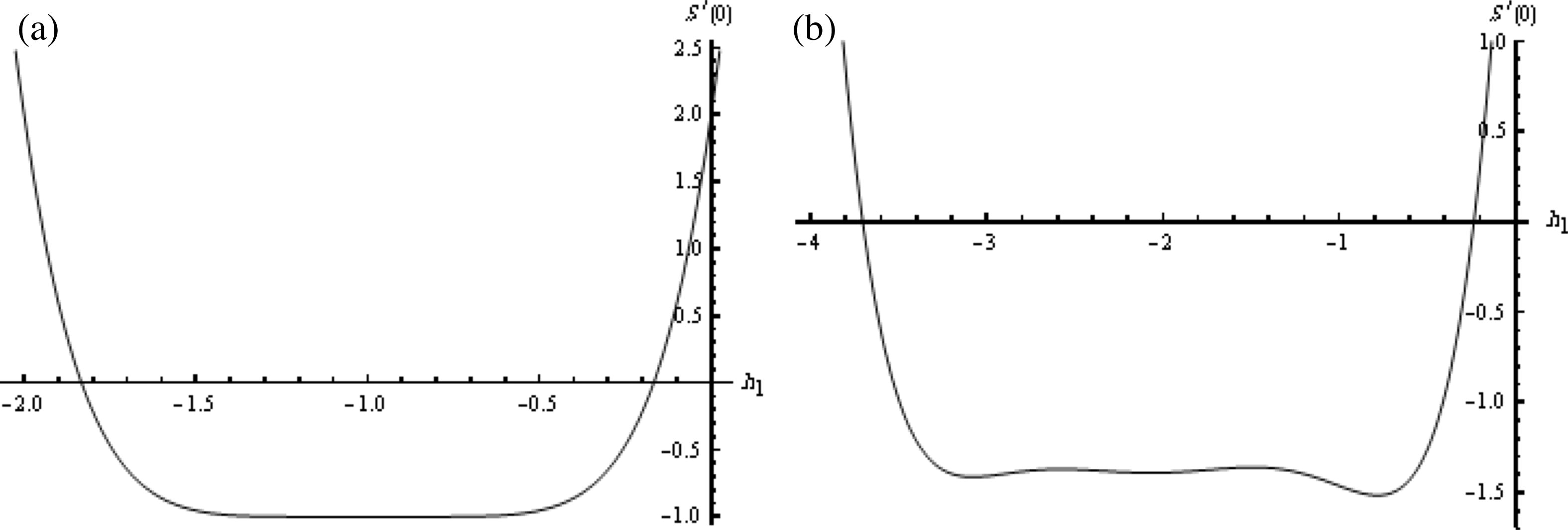
The ℏ1-curve of S′(0) obtained by the seventh order approximation of the HAM: (a) when μ1 = μ2 = μ3 = 1; (b) when μ1 = μ2 = μ3 = 0.75.
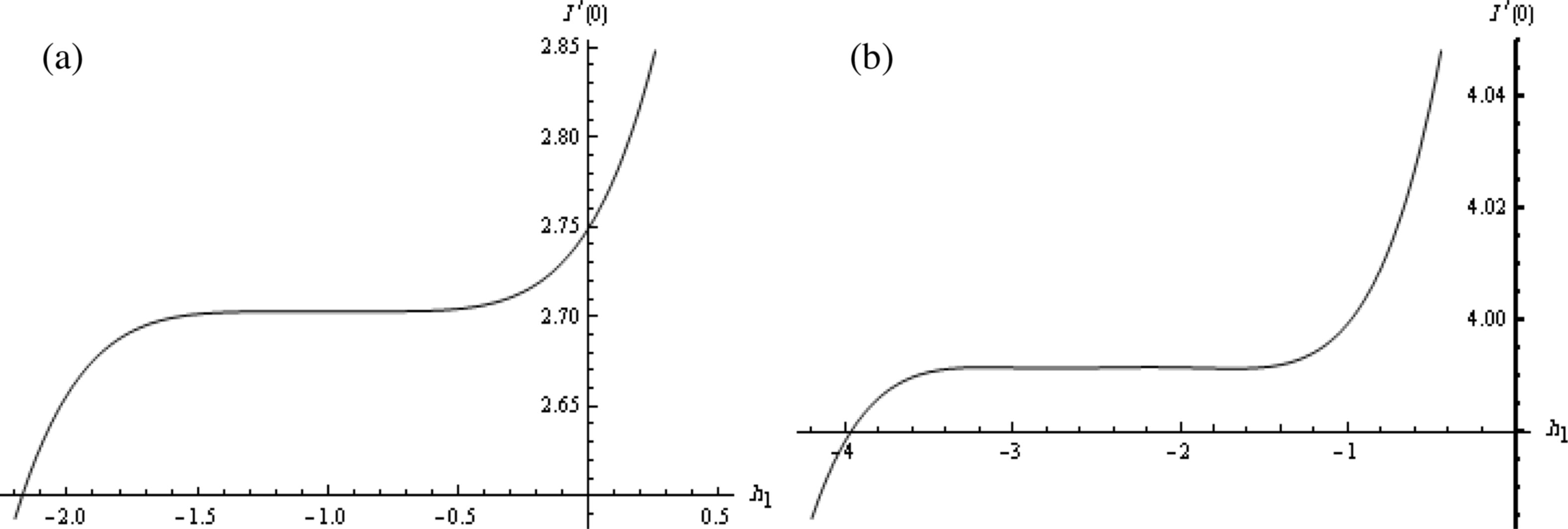
The ℏ1-curve of I′(0) obtained by the seventh order approximation of the HAM: (a) when μ1 = μ2 = μ3 = 1; (b) when μ1 = μ2 = μ3 = 0.75.
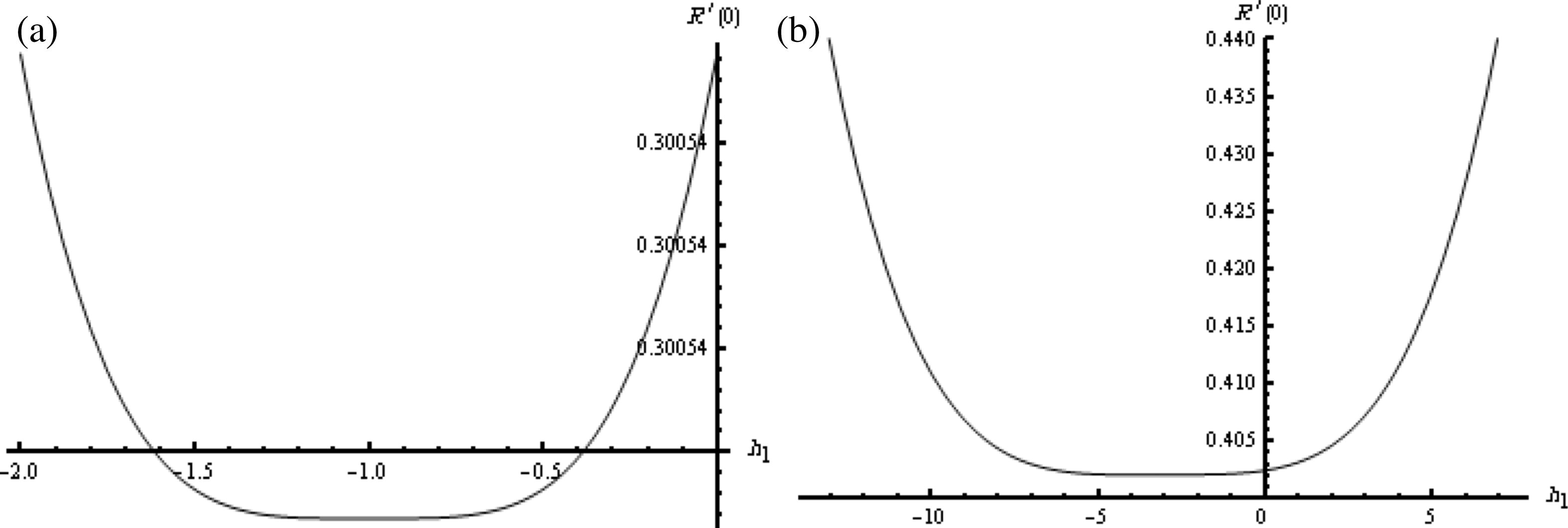
The ℏ1-curve of R′(0) obtained by the seventh order approximation of the HAM: (a) when μ1 = μ2 = μ3 = 1; (b) when μ1 = μ2 = μ3 = 0.75.
Again, according to these ℏ1-curves, it is easy to discover the valid region of ℏ1 which corresponds to the line segment nearly parallel to the horizontal axis. These valid regions have been listed in Table 1. Furthermore, these valid regions ensure us the convergence of the obtained series.
Component
μ1 = μ2 = μ3 = 1
μ1 = μ2 = μ3 = 0.75
S(t)
−1.4 < ℏ1 < −0.6
−2.7 < ℏ1 < −0.8
I(t)
−1.4 < ℏ1 < −0.5
−3.2 < ℏ1 < −1.2
R(t)
−1.2 < ℏ1 < −0.7
−5 < ℏ1 < 0
These results are plotted in Figs. 4–6, respectively, at the end points of the valid region given in Table 1 together with ℏ1 = −1 for the three components S(t), I(t), and R(t), respectively. As the plots show, while the number of susceptibles increases, the population of who are infective decreases in the period of the epidemic. Meanwhile, the number of immune population increases, but the size of the population over the period of the epidemic is constant.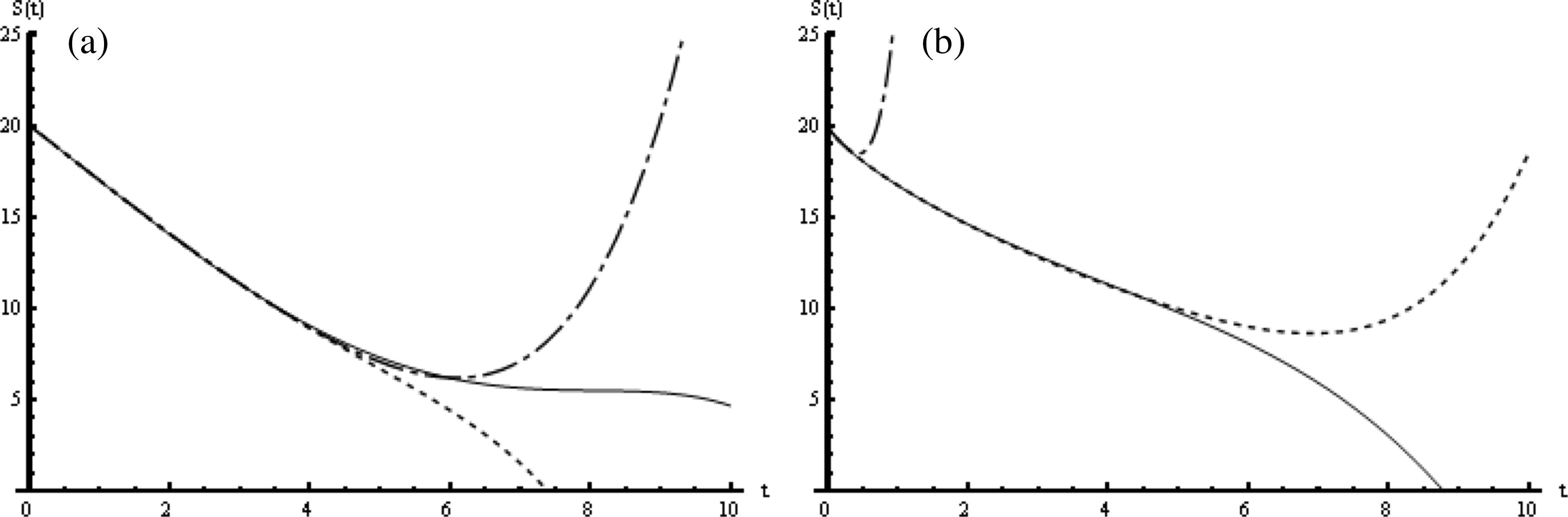
The HAM solution of S(t): (a) when μ1 = μ2 = μ3 = 1; dash-dotted line: ℏ1 = −1.4, dotted line: ℏ1 = −1, solid line: ℏ1 = −0.6. (b) when μ1 = μ2 = μ3 = 0.75; dash-dotted line: ℏ1 = −2.7, dotted line: ℏ1 = −1, solid line: ℏ1 = −0.8.
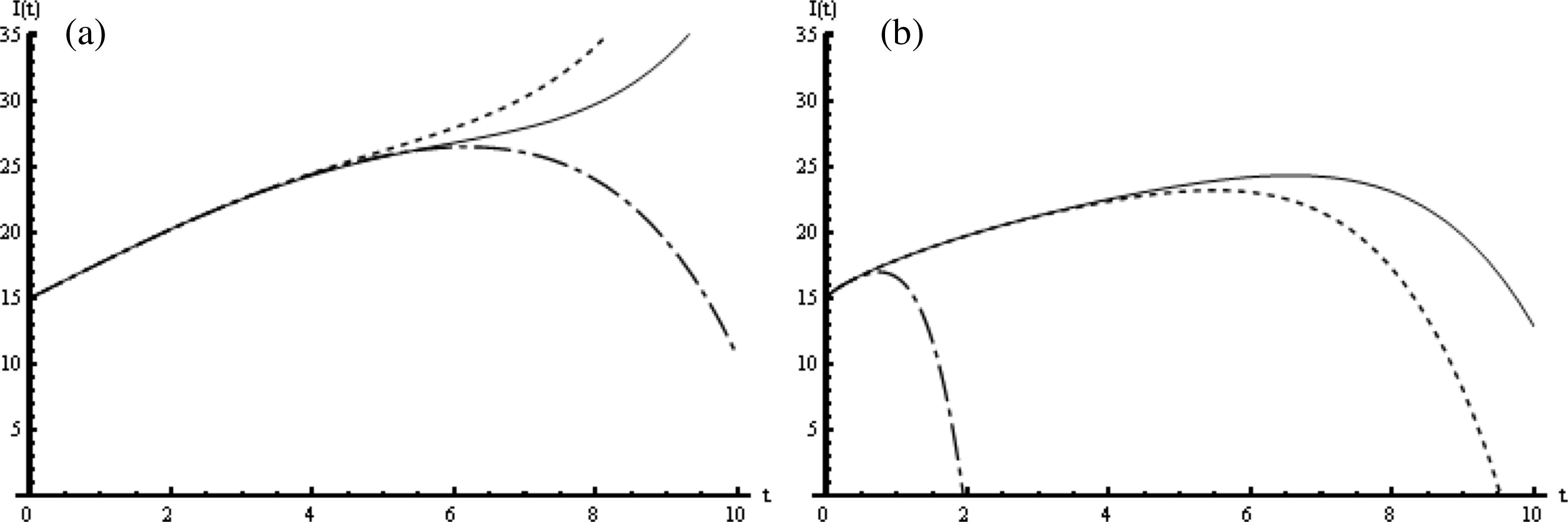
The HAM solution of I(t): (a) when μ1 = μ2 = μ3 = 1; dash-dotted line: ℏ1 = −1.4, dotted line: ℏ1 = −1, solid line: ℏ1 = −0.5. (b) when μ1 = μ2 = μ3 = 0.75; dash-dotted line: ℏ1 = −3.2, dotted line: ℏ1 = −1, solid line: ℏ1 = −1.2.
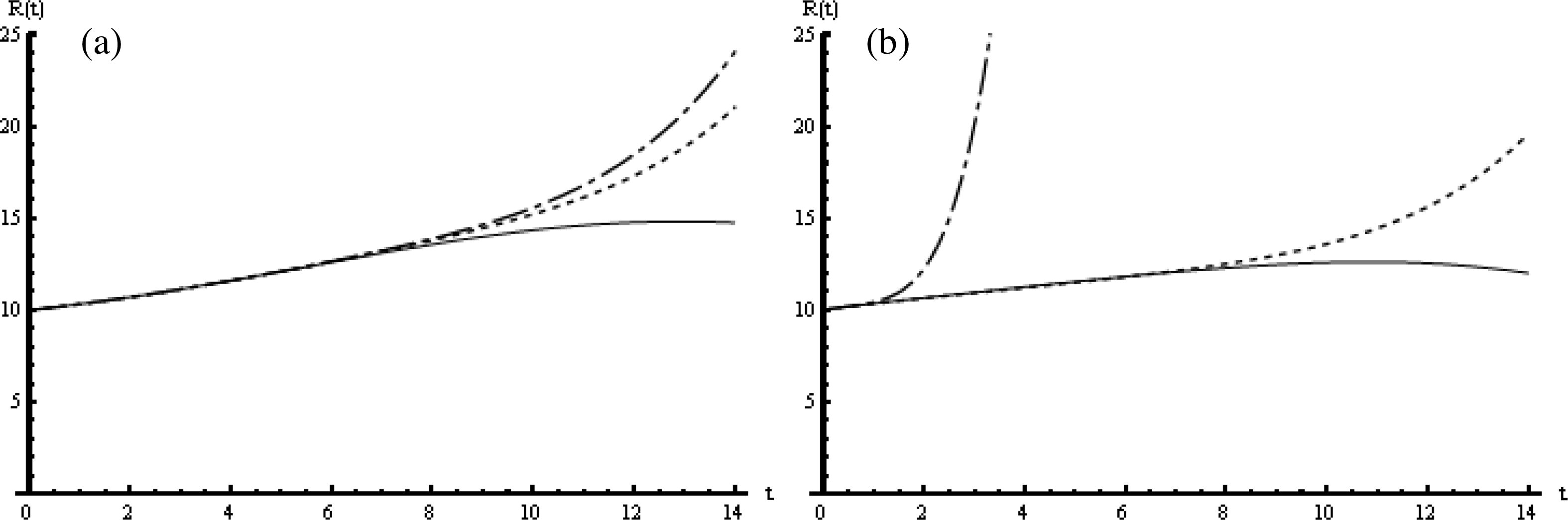
The HAM solution of R(t): (a) when μ1 = μ2 = μ3 = 1; dash-dotted line: ℏ1 = −1.2, dotted line: ℏ1 = −1, solid line: ℏ1 = −0.7 (b) when μ1 = μ2 = μ3 = 0.75; dash-dotted line: ℏ1 = −5, dotted line: ℏ1 = −1, solid line: ℏ1 = −0.2.
To determine the optimal values of ℏ1 in an interval [t0, t1], an error analysis is performed. We substitute the approximations ψS,7(t), ψI,7(t), and ψR,7(t) in Case 1 and Case 2 into Eq. (3) and obtain the residual functions; ERS, ERI, and ERR as follows Following Liao (2010), we define the square residual error for approximation solutions on the interval [t0, t1] as
By using the first derivative test, we can easily determine the values of ℏ1 for which the SERS, SERI, and SERR are minimum.
In Niu and Wang (2010), several methods have been introduced to find the optimal value of ℏ1. In Tables 2 and 3, the optimal values of ℏ1 for the two previous cases are tabulated.
[t0, t1]
S(t)
I(t)
R(t)
[0, 0.25]
−1.01789
−1.04129
−1.004
[0.25, 0.5]
−1.05265
−1.04316
−1.00822
[0.5, 0.75]
−0.96554
−1.05003
−1.01202
[0.75, 1]
−0.95369
−1.06521
−1.01569
[t0, t1]
S(t)
I(t)
R(t)
[0, 0.25]
−1.93974
−3.07891
−2.97013
[0.25, 0.5]
−1.30787
−1.33014
−2.54972
[0.5, 0.75]
−1.42404
−1.39255
−2.48637
[0.75, 1]
−1.12257
−1.30473
−2.24208
In Tables 4 and 5, the absolute errors ERS, ERI, and ERR have been calculated for the various t in]0, 1]. From the tables, it can be seen that the HAM provides us with the accurate approximate solution for the fractional SIR model (3) and (2).
t
S(t)
ERS
I(t)
ERI
R(t)
ERR
0.1
19.6996
7.98250 × 10−12
15.2702
3.32062 × 10−9
10.0303
1.25455 × 10−13
0.2
19.3984
9.18963 × 10−11
15.5405
1.99729 × 10−9
10.0611
9.63674 × 10−13
0.3
19.0967
2.35365 × 10−9
15.8109
9.10588 × 10−9
10.0924
5.50334 × 10−11
0.4
18.7946
9.69843 × 10−8
16.0811
1.86647 × 10−9
10.1243
1.01351 × 10−10
0.5
18.4923
8.25949 × 10−8
16.3509
3.06883 × 10−8
10.1568
2.05350 × 10−10
0.6
18.1899
4.56302 × 10−7
16.6203
8.87419 × 10−8
10.1897
1.16338 × 10−9
0.7
17.8877
1.79803 × 10−7
16.8891
2.08745 × 10−8
10.2232
1.63544 × 10−10
0.8
17.5858
2.72956 × 10−6
17.1569
5.39619 × 10−6
10.2573
6.73192 × 10−9
0.9
17.2843
7.26424 × 10−7
17.4238
3.88959 × 10−7
10.2919
2.94770 × 10−9
1.0
16.9835
4.97771 × 10−6
17.6895
9.25596 × 10−6
10.3270
1.17248 × 10−8
t
S(t)
ERS
I(t)
ERI
R(t)
ERR
0.1
19.4184
8.58906 × 10−4
15.5211
3.24403 × 10−2
10.0591
3.49976 × 10−3
0.2
19.0190
2.21032 × 10−3
15.8814
1.01885 × 10−2
10.1014
1.81610 × 10−3
0.3
18.6701
4.10320 × 10−3
16.1926
5.04414 × 10−3
10.1393
7.42771 × 10−4
0.4
18.3486
2.21434 × 10−4
16.4694
1.66542 × 10−4
10.1748
1.85557 × 10−4
0.5
18.0466
3.19900 × 10−3
16.7118
2.43165 × 10−3
10.2087
5.13441 × 10−5
0.6
17.7588
3.52253 × 10−3
16.9999
2.85768 × 10−3
10.2416
1.16874 × 10−4
0.7
17.4849
9.25863 × 10−4
17.2410
3.12027 × 10−3
10.2737
3.91056 × 10−5
0.8
17.2241
8.75244 × 10−4
17.4723
3.14582 × 10−3
10.3052
1.86796 × 10−4
0.9
16.9694
4.14473 × 10−4
17.6953
2.74835 × 10−3
10.3363
3.70990 × 10−5
1.0
16.7225
1.45279 × 10−3
17.9109
2.37497 × 10−3
10.3669
2.21411 × 10−4
7 Conclusion
In this paper, the HAM has successfully been applied to finding the approximate solution of fractional SIR model. The present scheme shows importance of choice of convergence control parameter to guarantee the convergence of the solutions. Moreover, higher accuracy can be achieved using HAM by evaluating more components of the solution. In the near future, we intend to make more researches as continuation to this work. One of these researches is: application of HAM to solve fractional SEIR model.
References
- New applications of He’s homotopy perturbation method for nonlinear differential difference equations. Phys. Script.. 2010;81(015003):1-8.
- [Google Scholar]
- Infectious Diseases of Humans: Dynamics and Control. Oxford: Oxford University Press; 1998.
- The Mathematical Theory of Infectious Diseases. London: Griffin; 1975.
- Solution of the epidemic model by Adomian decomposition method. Appl. Math. Comput.. 2006;173:1101-1106.
- [Google Scholar]
- Series solutions of non-linear Riccati differential equations with fractional order. Chaos, Solitons and Fractals. 2009;40:1-9.
- [Google Scholar]
- Linear models of dissipation whose Q is almost frequency independent, Part II. Geophys. J. Int.. 1967;13(5):529-539.
- [Google Scholar]
- New applications of the homotopy analysis method. Z. Naturforsch.. 2008;63A:385-392.
- [Google Scholar]
- The solution of coupled system of nonlinear physical problems using the homotopy analysis method. Phys. Script.. 2010;81(015001):1-8.
- [Google Scholar]
- Numerical solution of the system of nonlinear ordinary differential equations arising in kinetic modeling of lactic acid fermentation and epidemic model. Int. J. Numerical Methods Biomed. Eng.. 2011;27(4):585-594.
- [Google Scholar]
- A contribution to mathematical theory of epidemics. P. Roy. Soc. Lond. A Mat.. 1927;115:700-721.
- [Google Scholar]
- Theory and applications of fractional differential equations.North-Holland Math. Stud.. Vol vol. 204. Amsterdam, the Netherlands: Elsevier Science B.V.; 2006.
- Theory of Fractional Dynamic Systems. Cambridge, UK: Cambridge Academic; 2009.
- Liao, S.J., 1992. The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems, Ph.D. Thesis, Shanghai Jiao Tong University.
- Homotopy analysis method: a new analytic method for nonlinear problems. Appl. Math. Mech.. 1998;19(10):957-962.
- [Google Scholar]
- Beyond Perturbation: Introduction to the Homotopy Analysis Methods. Boca Raton: Chapman and Hall/CRC Press; 2003.
- On the homotopy analysis method for nonlinear problems. Appl. Math. Comput.. 2004;147:499-513.
- [Google Scholar]
- Series solutions of unsteady boundary-layer flows over a stretching flat plate. Stud. Appl. Math.. 2006;117(3):239-263.
- [Google Scholar]
- An optiomal homotopy-analysis approach for strongly nonlinear differential equation. Commun. Nonlinear Sci. Numer. Simulat.. 2010;15(8):2003-2016.
- [Google Scholar]
- Homotopy analysis method of nonlinear progressive waves in deep water. J. Eng. Math.. 2003;45(2):105-116.
- [Google Scholar]
- Luchko, Y., Gorenflo, R., 1998. The initial-value problem for some fractional differential equations with Caputo derivative. Preprint Series A08-98. Fachbereich Mathematik und Informatic, Berlin, Freie Universitat.
- Fractional calculus: some basic problems in continuum and statistical mechanics. In: Carpinteri A., Mainardi F., eds. Fractals and Fractional Calculus in Continuum Mechanics. Wien and New York: Springer-Verlag; 1997. p. :291-348.
- [Google Scholar]
- An Introduction to the Fractional Calculus and Fractional Differential Equations. New York: John Wiley and Sons; 1993.
- Mathematical Biology. New York: Springer-Verlag; 1993.
- A one-step optimal homotopy analysis method for nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simulat.. 2010;15(8):2026-2036.
- [Google Scholar]
- The Fractional Calculus. New York: Academic Press; 1974.
- Fractional Differential Equations. New York: Academic Press; 1999.
- Solution of the epidemic model by homotopy perturbation method. Appl. Math. Comput.. 2007;187:1056-1062.
- [Google Scholar]
- Analytic approximate solutions for heat transfer of a micropolar fluid through a porous medium with radiation. Commun. Nonlinear Sci. Numer. Simulat.. 2011;16(4):1874-1889.
- [Google Scholar]
- Application of homotopy analysis method to fractional KdV-Burgers–Kuramoto equation. Phys. Lett. A. 2007;367:88-94.
- [Google Scholar]
- Solving the Klein–Gordon equation by means of the homotopy analysis method. Appl. Math. Comput.. 2005;169:355-365.
- [Google Scholar]
- Solving solitary waves with discontinuity by means of the homotopy analysis method. Chaos, Solitons and Fractals. 2005;26:177-185.
- [Google Scholar]
- Analytical approximate solution of a SIR epidemic model with constant vaccination strategy by homotopy perturbation method. Kybernetes. 2009;38(9):1566-1575.
- [Google Scholar]
- An analytical approach to transmission dynamics of infectious diseases with waning immunity. J. Mech. Med. Biol.. 2011;11(4):929-940.
- [Google Scholar]




